
運動旋量用于正向運動
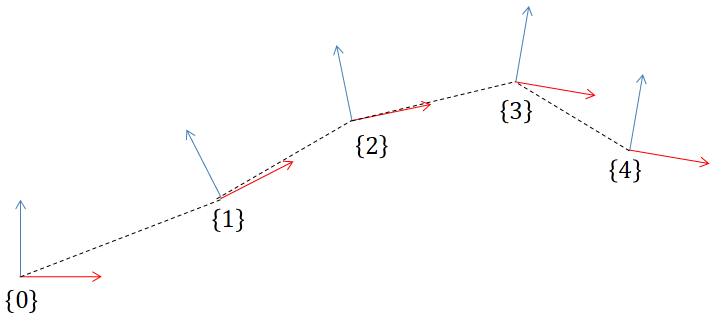
假設(shè){4}的原點,是最后的端點,那么先讓機器人復(fù)位,回到最初始的位姿:

回顧:
http://www.rzrgm.cn/pylblog/p/18085153
![]()
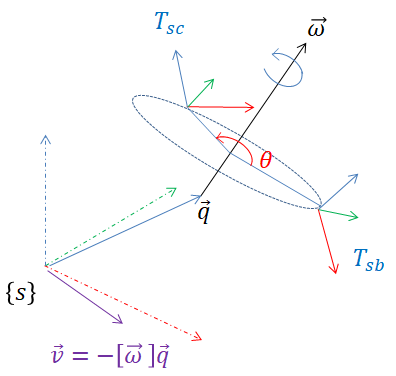
只需要知道{ω,q, θ},就可以獲得一個轉(zhuǎn)換:在b處的位姿,轉(zhuǎn)換到c處的位姿,而且位姿都是相對于統(tǒng)一固定坐標系s的
那么,可以:
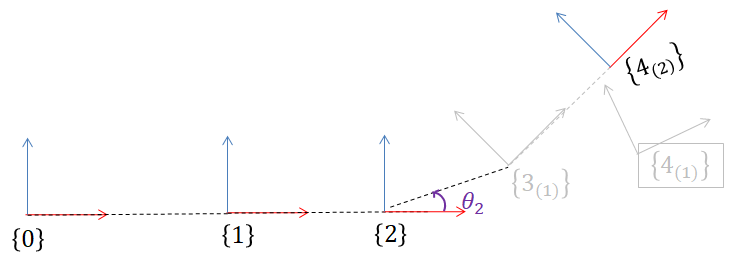
第一步:
1. 容易通過機械設(shè)計結(jié)構(gòu),得到 {4} 的初始位置,T04(0)
2. 假設(shè)只有 關(guān)節(jié){3} 發(fā)生旋轉(zhuǎn),那么,容易得到:
那么,馬上可以得到:
![]()
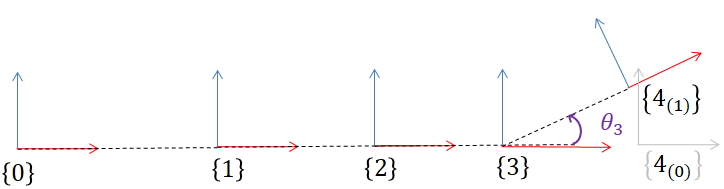
第二步:
那么,也容易得到:

那么,馬上可以得到:
![]()
那么,經(jīng)過類似的變化,就可以的到最終的結(jié)果:
![]()
其結(jié)果,等價于各個關(guān)節(jié)的位姿T相連:
![]()
區(qū)別:
1. 使用旋量計算,最后的T是相對于世界系的,從后往前;對于三維的計算,不需要考慮每個關(guān)節(jié)的坐標系相對于前一個關(guān)節(jié)是如何的。
2. 而后者是局部的位姿,從前往后;
使用運動旋量的方式計算位置,稱為PoE(Product of Exponential)指數(shù)積公式
其關(guān)鍵是:將每個關(guān)節(jié)的螺旋運動施加給后面的干
首先,需要準確知道,末端關(guān)節(jié)的初始位姿M(是相對于{0}系的,不是相對于上一個的)
(M最簡單的獲取方式,就是將各個關(guān)節(jié)“歸零”,然后根據(jù)機械圖紙直接推得)
末端的前一個關(guān)節(jié),假設(shè)為第N個關(guān)節(jié),那么,如果有如下變量:
1. θn:第n關(guān)節(jié)的旋轉(zhuǎn)量。(如果第n關(guān)機是移動關(guān)節(jié),那么 θn是移動的距離)
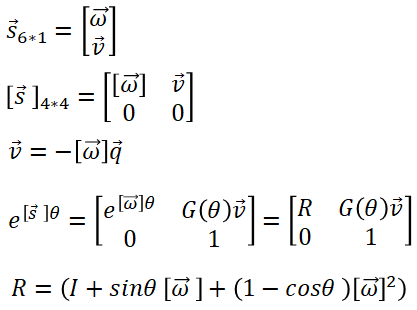
2. Sn = [ ωn, vn] ,vn = -[ωn] qn , qn按照幾何的定義,可以是沿轉(zhuǎn)軸上的的任意一點 。
(所以q并不重要,它只是輔助用的,但是有的書,是要從原點出發(fā),與旋轉(zhuǎn)軸正交的點)
(如果第n關(guān)機是移動關(guān)節(jié),ωn = 0, 而vn是沿關(guān)節(jié)正向運動的單位向量)
3. 以上vn,ωn都是相對于{0}系下的向量
運動旋量
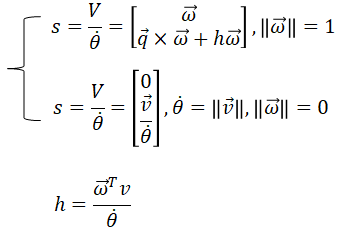
(注意,v是總的線速度,q是原點出發(fā),位于旋轉(zhuǎn)軸上的點,與原點連線垂直于旋轉(zhuǎn)軸)
(ωTv實際上,就是總速度在旋轉(zhuǎn)方向上的分量)
那么,第N關(guān)節(jié)的運動,使得末端關(guān)節(jié)的位姿從M變換為位姿T(相對于{0}的位姿):
![]() (注意:用于姿態(tài)正算時,不是用角速度,而是使用角度,只取旋量作為使用)
(注意:用于姿態(tài)正算時,不是用角速度,而是使用角度,只取旋量作為使用)
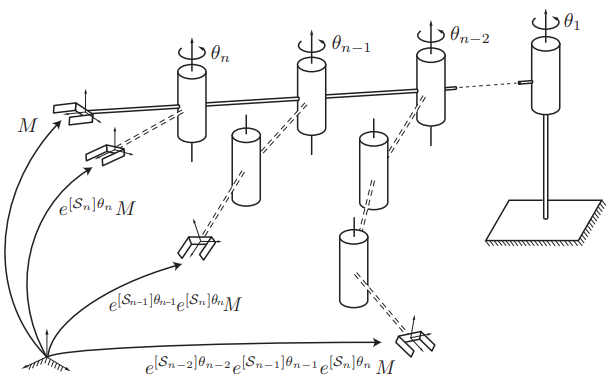
(從這個圖可以看出,不在乎{0}系是否在底座的關(guān)節(jié)上,反正ω, v都是相對于{0}系的)
各個S,都是可以在歸零位的時候就確定下來的,圖紙上就可以直接得到
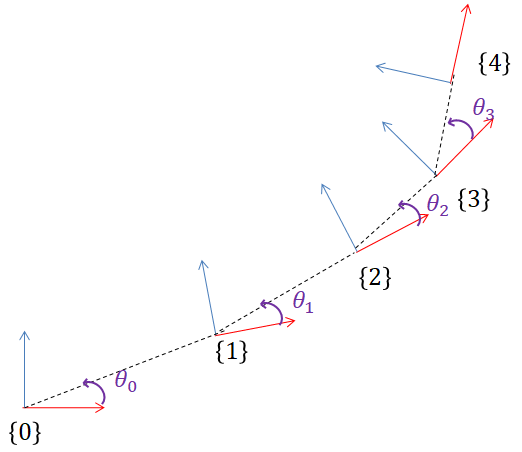
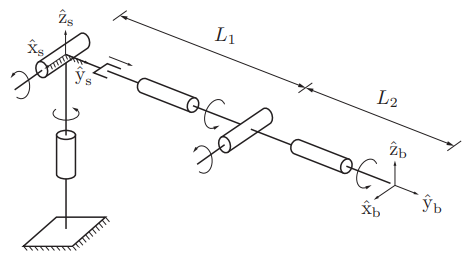
分析如下關(guān)節(jié):
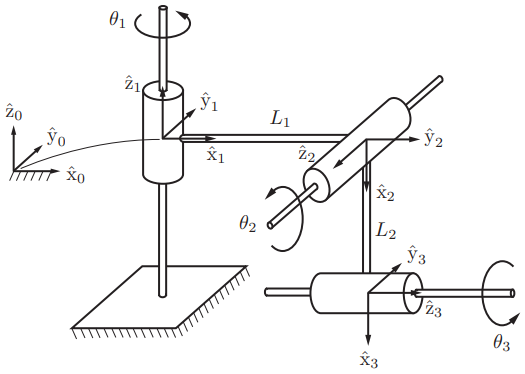
末端關(guān)節(jié)的位姿:
![]()
1. {0}系和{1}系,在開始時刻,是重合的
2. 末端關(guān)節(jié)和{3}系,在開始時刻,也是重合的
那么,末端關(guān)節(jié)位姿,有:
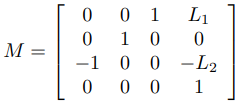
x 軸在{0}系的 [0,0,-1]方向。
y 軸在{0}系的 [0,1,0]方向。
z 軸在{0}系的 [1,0,0]方向。
原點在[L1,0,-L2]處
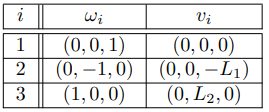
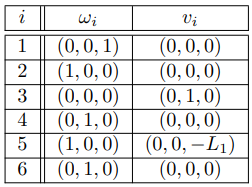
各個關(guān)節(jié)的螺旋軸:
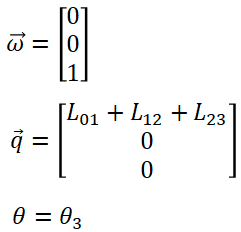
i = 3:旋轉(zhuǎn)軸ω,在{0}系下,ω = [1,0,0] ;
v = - [ω] q,q只需要沿ω軸上的任意一點,所以可以選擇為,在{0}系下,q = [0,0,-L2]
所以,v = [0,L2,0]
i = 2:旋轉(zhuǎn)軸ω,在{0}系下,ω = [0,-1,0] ; 在{0}系下,q = [L1,0,0],所以,v = [0,0,-L1]
i = 1:旋轉(zhuǎn)軸ω,在{0}系下,ω = [0,0,1] ; 在{0}系下,q = [0,0,0],所以,v = [0,0,0]
(這種定義方式,確實要比D-H表方式更加簡單)
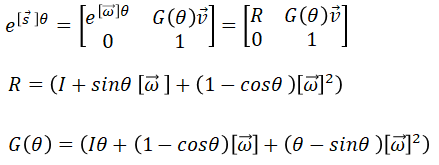
注意到
i = 3時,是移動關(guān)節(jié),所以:
ω = [0,0,0]
v = [0,1,0],是運動方向向量
θ為移動的距離。
基于此,嘗試代入:
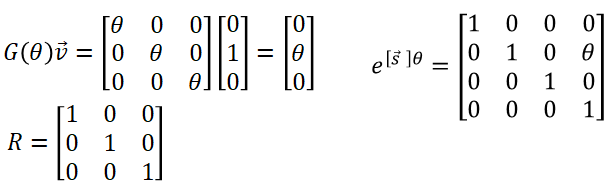
由此可見,這種方式“湊”的轉(zhuǎn)換矩陣,就是平移用的
通用機器人描述格式URDF(Universal Robot Description Format ):
1. 關(guān)節(jié)(join)。包含 關(guān)節(jié)變量為0是,子桿相對于父桿的位姿(局部坐標系下的位姿),子桿原點在關(guān)節(jié)。
2. 桿(link)。包括:
(1)桿的質(zhì)量。
(2)桿的質(zhì)心,相對于關(guān)節(jié)坐標系的位姿(局部坐標系下的位姿)

 浙公網(wǎng)安備 33010602011771號
浙公網(wǎng)安備 33010602011771號