

基于協(xié)方差交叉(CI)的多傳感器融合算法matlab仿真,對(duì)比單傳感器和SCC融合
1.程序功能描述
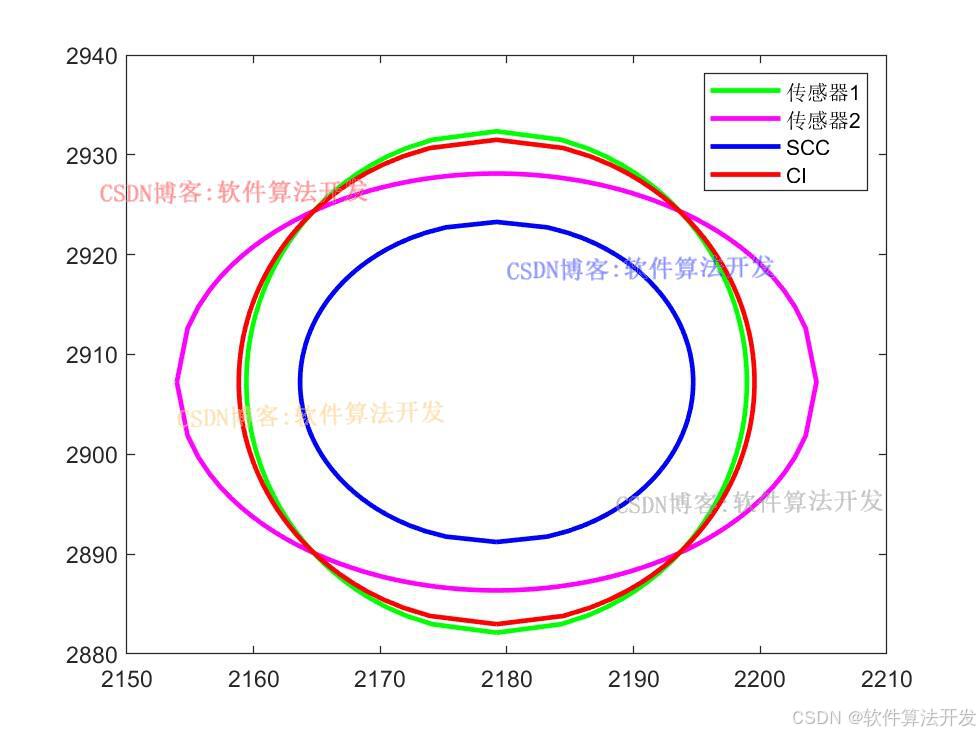
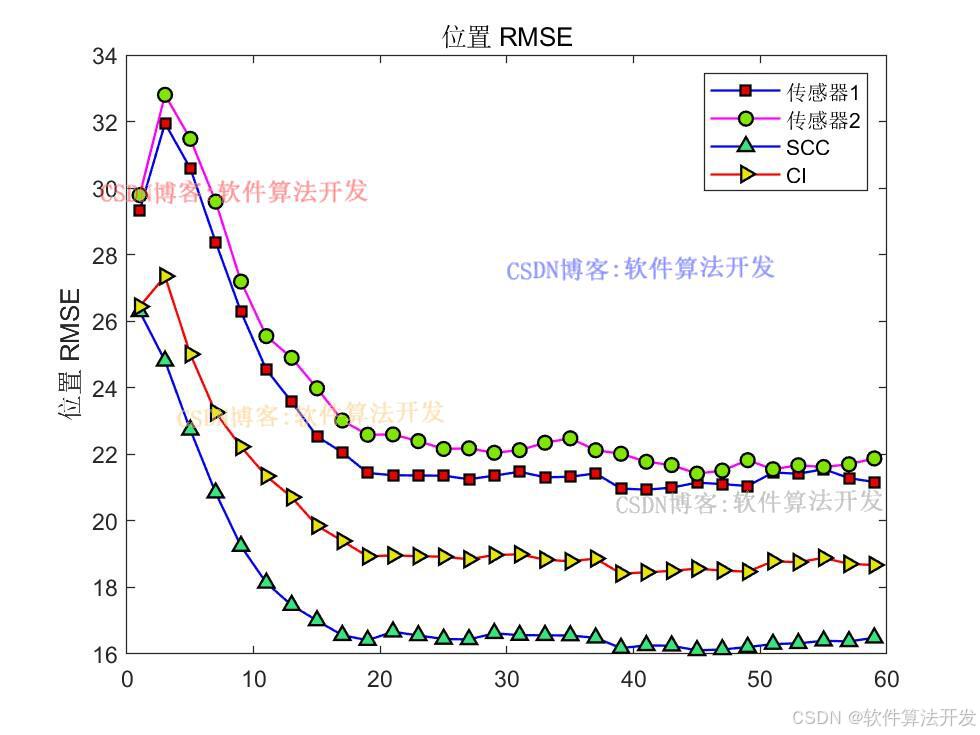
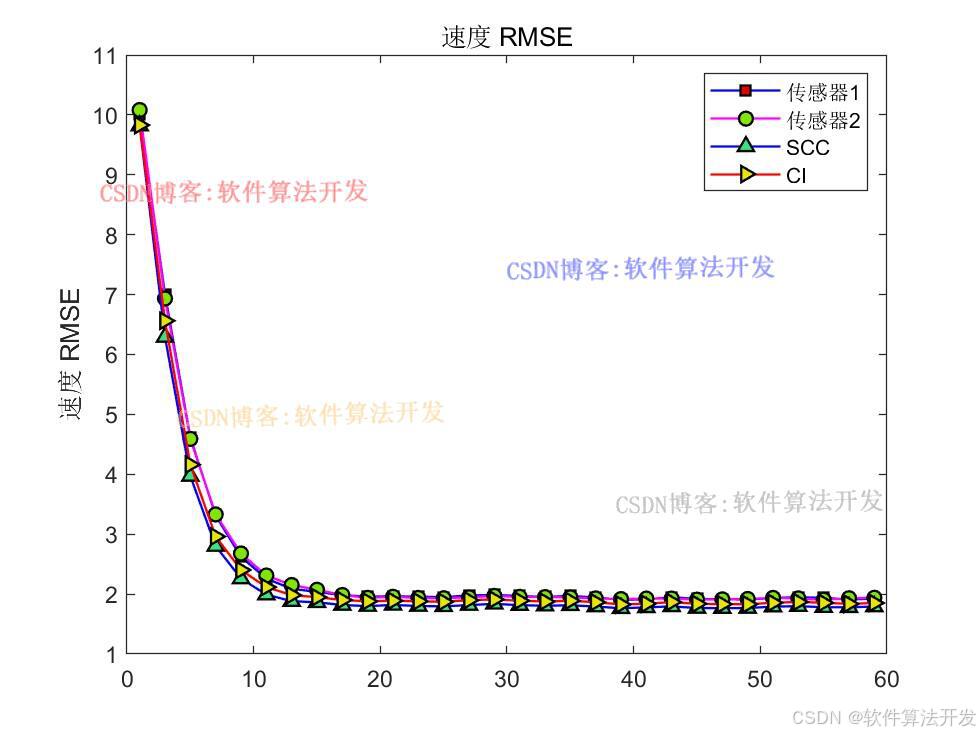
基于協(xié)方差交叉(CI)的多傳感器融合算法matlab仿真,對(duì)比單傳感器和SCC融合。對(duì)比速度估計(jì)誤差RMSE指標(biāo),位置估計(jì)誤差RMSE指標(biāo),等概率密度橢圓。
2.測試軟件版本以及運(yùn)行結(jié)果展示
MATLAB2022A版本運(yùn)行
3.核心程序
STEPS=1;
figure;
plot(xy1(1:STEPS:end,1),xy1(1:STEPS:end,2),'-g',...
'LineWidth',2);
hold on
plot(xy2(1:STEPS:end,1),xy2(1:STEPS:end,2),'-m',...
'LineWidth',2);
hold on
plot(xy3(1:STEPS:end,1),xy3(1:STEPS:end,2),'-b',...
'LineWidth',2);
hold on
plot(xy4(1:STEPS:end,1),xy4(1:STEPS:end,2),'-r',...
'LineWidth',2);
hold on
legend('傳感器1','傳感器2','SCC','CI');
STEPS=2;
figure
k=1:nums;
% 繪制位置估計(jì)誤差的均方根誤差圖
plot(k(1:STEPS:end),Perr1(1:STEPS:end),'-bs',...
'LineWidth',1,...
'MarkerSize',6,...
'MarkerEdgeColor','k',...
'MarkerFaceColor',[0.9,0.0,0.0]);
hold on
plot(k(1:STEPS:end),Perr2(1:STEPS:end),'-mo',...
'LineWidth',1,...
'MarkerSize',6,...
'MarkerEdgeColor','k',...
'MarkerFaceColor',[0.5,0.9,0.0]);
hold on
plot(k(1:STEPS:end),Perr_scc(1:STEPS:end),'-b^',...
'LineWidth',1,...
'MarkerSize',6,...
'MarkerEdgeColor','k',...
'MarkerFaceColor',[0.2,0.9,0.5]);
hold on
plot(k(1:STEPS:end),Perr_ci(1:STEPS:end),'-r>',...
'LineWidth',1,...
'MarkerSize',6,...
'MarkerEdgeColor','k',...
'MarkerFaceColor',[0.9,0.9,0.0]);
hold on
legend('傳感器1','傳感器2','SCC','CI');
ylabel({'位置 RMSE'} );
title('位置 RMSE');
figure
k=1:nums;
% 繪制速度估計(jì)誤差的均方根誤差圖
plot(k(1:STEPS:end),Verr1(1:STEPS:end),'-bs',...
'LineWidth',1,...
'MarkerSize',6,...
'MarkerEdgeColor','k',...
'MarkerFaceColor',[0.9,0.0,0.0]);
hold on
plot(k(1:STEPS:end),Verr2(1:STEPS:end),'-mo',...
'LineWidth',1,...
'MarkerSize',6,...
'MarkerEdgeColor','k',...
'MarkerFaceColor',[0.5,0.9,0.0]);
hold on
plot(k(1:STEPS:end),Verr_scc(1:STEPS:end),'-b^',...
'LineWidth',1,...
'MarkerSize',6,...
'MarkerEdgeColor','k',...
'MarkerFaceColor',[0.2,0.9,0.5]);
hold on
plot(k(1:STEPS:end),Verr_ci(1:STEPS:end),'-r>',...
'LineWidth',1,...
'MarkerSize',6,...
'MarkerEdgeColor','k',...
'MarkerFaceColor',[0.9,0.9,0.0]);
hold on
legend('傳感器1','傳感器2','SCC','CI');
ylabel({'速度 RMSE'} )
title('速度 RMSE');
4.本算法原理
在多源信息處理領(lǐng)域,為獲取更精確可靠的估計(jì)結(jié)果,常需融合多個(gè)傳感器數(shù)據(jù)。協(xié)方差交叉(CI)算法作為一種重要的融合方法,在無需精確知曉傳感器間相關(guān)性信息時(shí),就能有效融合多傳感器估計(jì)值,具備良好的魯棒性。
CI算法基于這樣的理念,即融合后的估計(jì)協(xié)方差應(yīng)小于等于各傳感器估計(jì)協(xié)方差的加權(quán)和。

在多傳感器數(shù)據(jù)融合中,每個(gè)傳感器的觀測數(shù)據(jù)可看作位于某個(gè)子空間內(nèi)。SCC 算法旨在找到不同傳感器數(shù)據(jù)子空間之間的一致性關(guān)系。
單傳感器:由于信息來源單一,其估計(jì)的準(zhǔn)確性和可靠性受傳感器自身性能限制。在面對(duì)復(fù)雜環(huán)境或存在噪聲干擾時(shí),估計(jì)誤差較大。例如,在多徑效應(yīng)嚴(yán)重的環(huán)境中,基于單一雷達(dá)傳感器的目標(biāo)定位誤差會(huì)顯著增大。
CI 融合:CI 算法能夠有效融合多個(gè)傳感器信息,在一定程度上減小估計(jì)誤差。由于其對(duì)傳感器間相關(guān)性要求不高,在實(shí)際應(yīng)用中具有較強(qiáng)的魯棒性。但當(dāng)傳感器數(shù)量過多或傳感器數(shù)據(jù)存在較大沖突時(shí),融合效果可能會(huì)受到影響。
SCC 融合:SCC 融合通過挖掘傳感器數(shù)據(jù)子空間的一致性,在處理具有相似特征的數(shù)據(jù)時(shí)表現(xiàn)較好。然而,其性能高度依賴于特征提取和聚類算法的準(zhǔn)確性。如果特征提取不準(zhǔn)確或聚類參數(shù)設(shè)置不當(dāng),可能導(dǎo)致錯(cuò)誤的融合結(jié)果。
