

機器人路徑規劃和避障算法matlab仿真,分別對比貪婪搜索,最安全距離,RPM以及RRT四種算法
1.程序功能描述
機器人路徑規劃和避障算法matlab仿真,分別對比貪婪搜索,最安全距離,RPM以及RRT四種算法。仿真輸出地圖以及四種算法的路線規劃結果。
2.測試軟件版本以及運行結果展示
MATLAB2022A版本運行
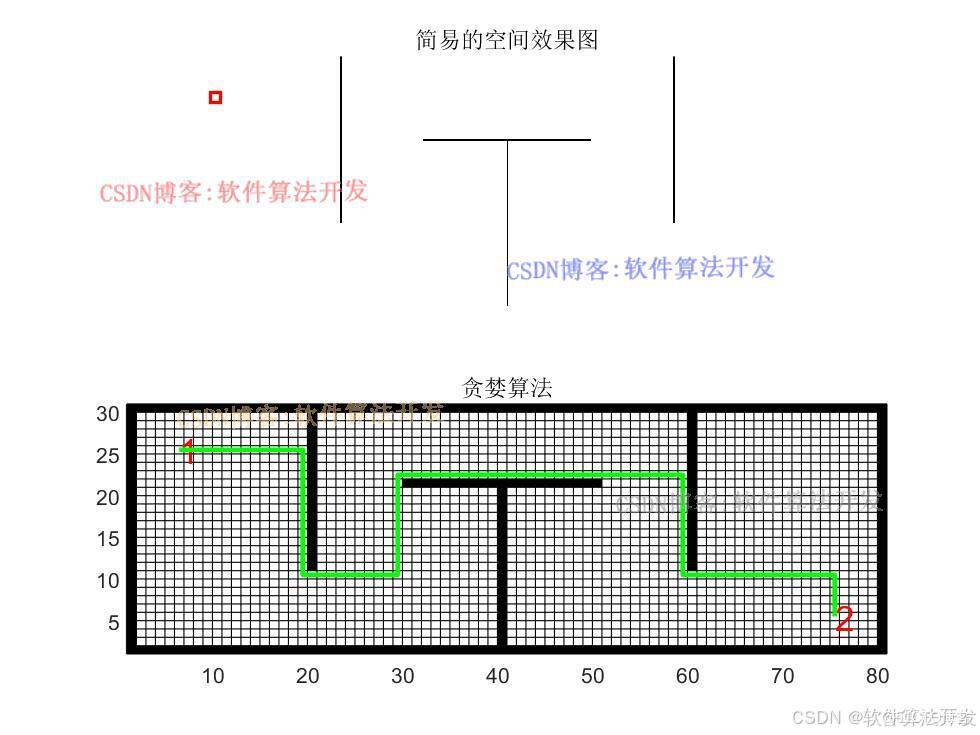
貪婪搜索
最安全距離

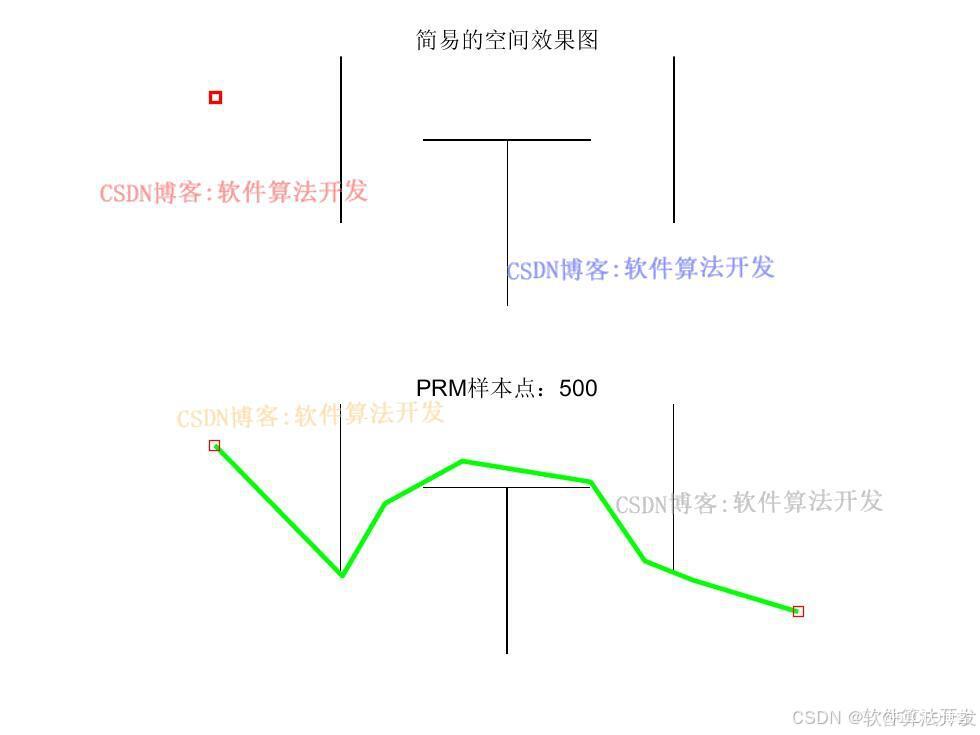
RPM
RRT

3.核心程序
%開始貪心算法搜索,
while ~max(ismember(S1,Ends))&&~isempty(S1)
for jj=1:length(path3)
if ~isinf(path1(jj))
if ~max([S1;S4]==path3(jj))
MAPpoint{path3(jj)}=Paths(jj);
S1 = [S1; path3(jj)];
S2 = [S2; path1(jj)];
S3 = [S3; path2(jj)];
elseif max(S1==path3(jj))
i=find(S1==path3(jj));
if S2(i)>path1(jj)
S2(i)=path1(jj);
S3(i)=path2(jj);
MAPpoint{S1(i)}=Paths(jj);
end
else i=find(S4==path3(jj));
if S5(i)>path1(jj)
S5(i)=path1(jj);
MAPpoint{S4(i)}=Paths(jj);
end
end
end
end
if isempty(S1)
break;
end
end
Pathss=func_check(Ends,MAPpoint);
figure(1);
plot(Pathss(:,1)+0.5,Pathss(:,2)+0.5-(W-H)/K,'color',[0 1 0],'LineWidth',2);
title('貪婪算法');
X=Pathss(:,1)+0.5;
Y=Pathss(:,2)+0.5-(W-H)/K;
%輸出長度
d=0;
for i = 1:length(X)-1
d = d+K*sqrt((X(i)-X(i+1))^2 + (Y(i)-Y(i+1))^2);
end
d
4.本算法原理
4.1貪婪搜索算法原理
貪婪搜索算法是一種啟發式搜索算法。它在路徑規劃過程中,每一步都選擇當前看起來最優的節點進行擴展,而不考慮整體的最優解。其核心是基于一個啟發式函數來評估每個節點的吸引力,選擇最有希望的節點作為下一步探索的方向。
這種算法的優點是簡單快速,能夠快速地朝著目標方向進行搜索。但是,它可能會陷入局部最優解。例如,在存在障礙物的環境中,它可能會沿著一條看似直接通向目標但實際上被障礙物阻擋的路徑前進,而錯過其他可能更好的路徑。
4.2最安全距離算法原理
最安全距離算法的重點在于保證機器人與障礙物之間保持足夠的安全距離,以此來避免碰撞。它主要是基于機器人和障礙物的幾何位置關系來進行路徑規劃和避障。
這種算法的優點是能夠有效地避免碰撞,保障機器人的安全運行,但它可能需要頻繁地計算距離,計算成本較高,并且在復雜環境中,可能會因為過度保守而導致路徑效率不高。
4.3RPM 算法原理
RPM 算法主要用于點云配準等領域,在機器人路徑規劃和避障中可用于環境感知和地圖構建階段。它的目標是找到一個最優的變換(如平移、旋轉等),使得兩個點云集合能夠最佳匹配。
RPM 算法的優點是能夠在存在噪聲和部分重疊的點云情況下,較好地找到點云之間的匹配關系,從而為機器人的環境感知和地圖更新提供準確的信息,但它的計算復雜度較高,尤其是在大規模點云數據處理時。
4.4 RRT 算法原理
RRT 算法是一種基于隨機采樣的路徑規劃算法,它通過在機器人的工作空間中快速構建一棵搜索樹來尋找從起始點到目標點的路徑。該算法能夠有效地探索高維空間中的復雜環境,并且具有較好的實時性。
RRT 算法的優點是能夠快速探索空間,適用于復雜環境和高維空間,但它找到的路徑可能不是最優路徑,并且其性能受隨機采樣的影響。
