
Goroutine間的“靈魂管道”:Channel如何實現數據同步與因果傳遞?
Channel是連接Goroutine的“管道”,是CSP理念在Golang中的具象化實現。它不僅是數據傳遞的隊列,更是Goroutine間同步的天然工具,讓開發者無需訴諸顯式的鎖或條件變量。
func main() {
ch := make(chan int, 1) // 創建一個int,緩沖區大小為1的Channel
ch <- 2 // 將2發送到ch
go func() { // 開啟一個異步Goroutine
n, ok := <-ch // n接收從ch發出的值,如果沒有接收到數據,將會阻塞等待
if ok {
fmt.Println(n) // 2
}
}()
close(ch) // 關閉Channel
}
Channel數據結構
Channel 在運行時使用src/runtime/chan.go 結構體表示。我們在 Go 語言中創建新的 Channel 時,實際上創建的是如下所示的結構。
type hchan struct {
qcount uint // 隊列中所有數據總數
dataqsiz uint // 環形隊列的 size
buf unsafe.Pointer // 指向 dataqsiz 長度的數組
elemsize uint16 // 元素大小
closed uint32
elemtype *_type // 元素類型
sendx uint // 已發送的元素在環形隊列中的位置
recvx uint // 已接收的元素在環形隊列中的位置
recvq waitq // 接收者的等待隊列
sendq waitq // 發送者的等待隊列
lock mutex
}

runtime.hchan 結構體中的五個字段 qcount、dataqsiz、buf、sendx、recv 構建底層的循環隊列。除此之外,elemsize 和 elemtype 分別表示當前 Channel 能夠收發的元素類型和大小。
sendq 和 recvq 存儲了當前 Channel 由于緩沖區空間不足而阻塞的 Goroutine 列表,這些等待隊列使用雙向鏈表 runtime.waitq表示,鏈表中所有的元素都是runtime.sudog 結構。
type waitq struct {
first *sudog
last *sudog
}
runtime.sudog(Scheduling Unit Descriptor)是用于實現Goroutine調度的一種數據結構。它包含了與Goroutine相關的信息,如Goroutine的狀態、等待的條件、等待的時間等。
當一個Goroutine需要等待某個事件或條件時,它會創建一個runtime.sudog,并將其加入到等待隊列中。當事件或條件滿足時,等
待隊列中的runtime.sudog會被喚醒,從而允許對應的Goroutine繼續執行。
Channel發送數據
1)如果等待接收的隊列recvq中存在Goroutine,那么直接把正在發送的值發送給等待接收的Goroutine。

2)當緩沖區未滿時,找到sendx所指向的緩沖區數組的位置,將正在發送的值拷貝到該位置,并增加sendx索引以及釋放鎖。

3)如果是阻塞發送,那么就將當前的Goroutine打包成一個sudog結構體,并加入到Channel的發送隊列sendq里。

之后則調用goparkunlock將當前Goroutine設置為_Gwaiting狀態并解鎖,進入阻塞狀態等待被喚醒;如果被調度器喚醒,執行清理
工作并最終釋放對應的sudog結構體。
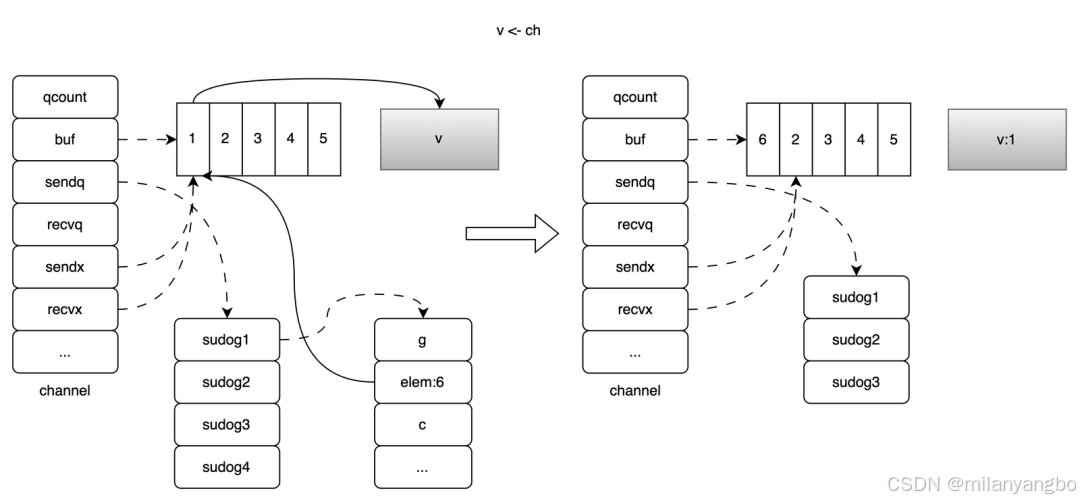
Channel接收數據
1)如果等待發送的隊列sendq里存在掛起的Goroutine,那么有兩種情況:當前Channel無緩沖區,或者當前Channel已滿。從sendq中取出最先阻塞的Goroutine,然后調用recv方法,此時需做如下判斷:
- 如果無緩沖區,那么直接從sendq接收數據;
- 如果緩沖區已滿,從buf隊列的頭部接收數據,并把數據加到buf隊列的尾部;
- 最后調用goready函數將等待發送數據的Goroutine的狀態從_Gwaiting置為_Grunnable,等待下一次調度。
當緩沖區已滿時的處理過程。
2)如果緩沖區buf中還有元素,那么就走正常的接收,將從buf中取出的元素拷貝到當前協程的接收數據目標內存地址中。值得注意的是,即使此時Channel已經關閉,仍然可以正常地從緩沖區buf中接收數據。
3)如果是阻塞模式,且當前沒有數據可以接收,那么就需要將當前Goroutine打包成一個sudog加入到Channel的等待接收隊列recvq中,將當前Goroutine的狀態置為_Gwaiting,等待喚醒。

Channel與happens-before 關系
Channel happens-before 規則有 4 條。
1)對一個元素的send操作happens-before對應的receive 完成操作。
var c = make(chan int, 10) // buffered或者unbuffered
var a string
func f() {
// a 的初始化 happens-before 往ch中發送數據
a = "hello, world"
c <- 0
}
func main() {
go f()
// 往ch發送數據 happens-before 從ch中讀取出數據
<-c
// 打印a的值 happens-after 第12行
// 打印a的結果值“hello world”
print(a)
}
2)對Channel的close操作happens-before receive 端的收到關閉通知操作。
var c = make(chan int, 10) // buffered或者unbuffered
var a string
func f() {
// a 的初始化 happens-before close ch
a = "hello, world"
close(c)
}
func main() {
go f()
// close ch happens-before 從ch中讀取出數據
<-c
// 打印a的值 happens-after 第12行
// 打印a的結果值“hello world”
print(a)
}
3)對于Unbuffered Channel,對一個元素的receive 操作happens-before對應的send完成操作。
var c = make(chan int) // unbuffered
var a string
func f() {
// a 的初始化 happens-before 從ch中讀取出數據
a = "hello, world"
<-c
}
func main() {
go f()
// 從ch中讀取出數據 happens-before 往ch發送數據
c <- 0
// 打印a的值 happens after 第12行
// 打印a的結果值“hello world”
print(a)
}
4)如果 Channel 的容量是 c(c>0),那么,第 n 個 receive 操作 happens-before 第 n+c 個 send 的完成操作。規則3是規則4 c=0時的特例。
Channel使用場景
1)并發控制:通過控制帶緩沖的Channel 的隊列大小來限制并發的數量。
func worker(id int, sem chan struct{}) {
// 獲取許可
sem <- struct{}{}
time.Sleep(time.Second) // 模擬耗時操作
// 釋放許可
<-sem
}
func main() {
// 創建一個緩沖區為2的Channel
sem := make(chan struct{}, 2)
for i := 0; i < 5; i++ {
go worker(i, sem)
}
}
2)信號通知:使用一個無緩沖的 Channel 來通知一個 Goroutine 任務已經完成。
func main() {
done := make(chan bool)
go func() {
time.Sleep(2 * time.Second) // 模擬耗時操作
// 發送信號表示工作已完成
done <- true
}()
<-done // 等待信號
}
3)異步操作結果獲取:在一個 Goroutine 中執行異步操作,然后通過 Channel 將結果發送到另一個 Goroutine。
func asyncTask() <-chan int {
ch := make(chan int)
go func() {
// 模擬異步操作
time.Sleep(2 * time.Second)
ch <- 1 // 發送結果
close(ch)
}()
return ch
}
func main() {
ch := asyncTask()
time.Sleep(1 * time.Second) // 模擬其他操作
result := <-ch // 獲取異步操作的結果
}
總結:控制與編排,殊途同歸
Java 與 Golang 在并發模型上的差異,深刻地體現了兩種構建程序確定性的不同哲學:
1)Java (共享內存):采用顯式同步的路徑。它為開發者提供了強大的底層控制能力(鎖、內存屏障),但要求開發者必須承擔起預見并管理資源競態的心智負擔。確定性來自于對臨界區和內存可見性的嚴格手工控制。
2)Golang (消息傳遞):采用隱式因果的路徑。它通過 Channel 將數據的所有權在 Goroutine 間傳遞,將并發問題從“共享數據訪問”轉化為“數據流設計”。確定性來自于消息傳遞建立的自然因果順序,從而在結構上規避了競態。
Java的路徑是“先有并發,后加約束”,而Golang的路徑是“通過約束,實現并發”。兩者并非優劣之分,而是針對不同問題域和開發哲學的選擇。Java的完備工具集賦予了處理極端復雜場景的靈活性,而Golang的簡約設計則為構建清晰、可靠、易于推理的并發系統提供了優雅的范式。
最終,無論是顯式的同步約束,還是隱式的因果傳遞,它們都通向并發編程的圣杯——在多核時代,構建出可預測、可維護且高性能的軟件系統。這兩種思想的碰撞與融合,正持續推動著現代并發編程的演進。
很高興與你相遇!如果你喜歡本文內容,記得關注哦
本文來自博客園,作者:poemyang,轉載請注明原文鏈接:http://www.rzrgm.cn/poemyang/p/19142146

 浙公網安備 33010602011771號
浙公網安備 33010602011771號