
@
一、旋轉運動學
1.1 線速度與角速度

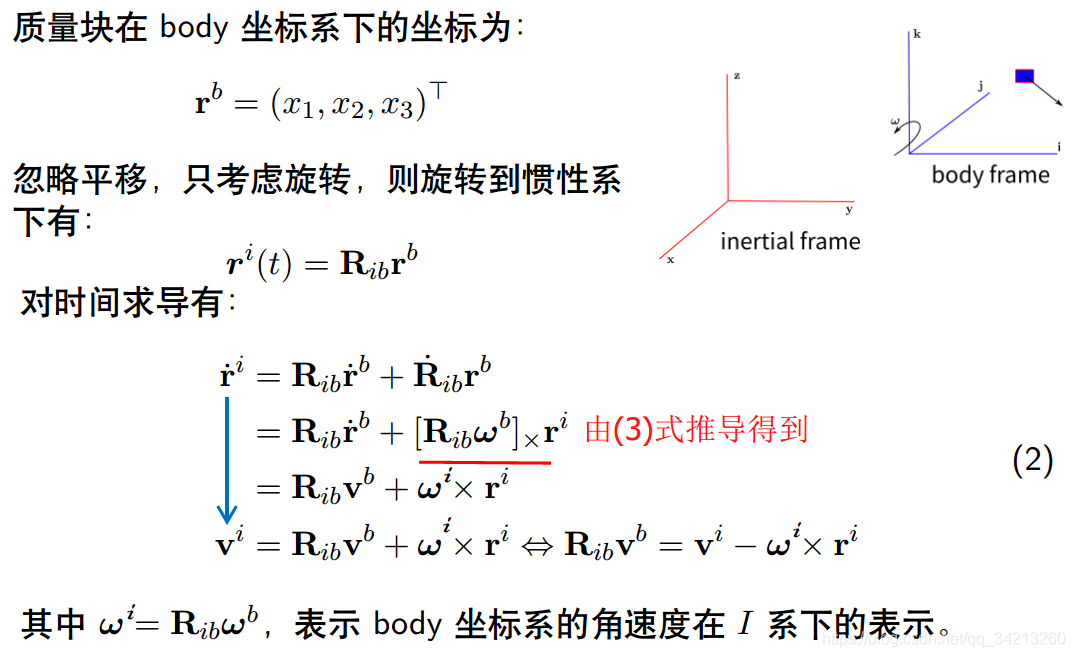
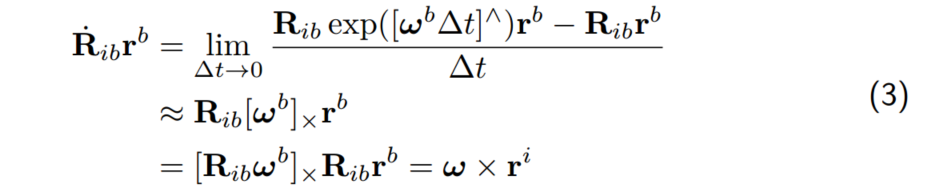
1.2 旋轉坐標系下的運動學
 補充:右擾動模型:
補充:右擾動模型:
\(R[w]_{X}=[R w]_{X} \cdot R\)
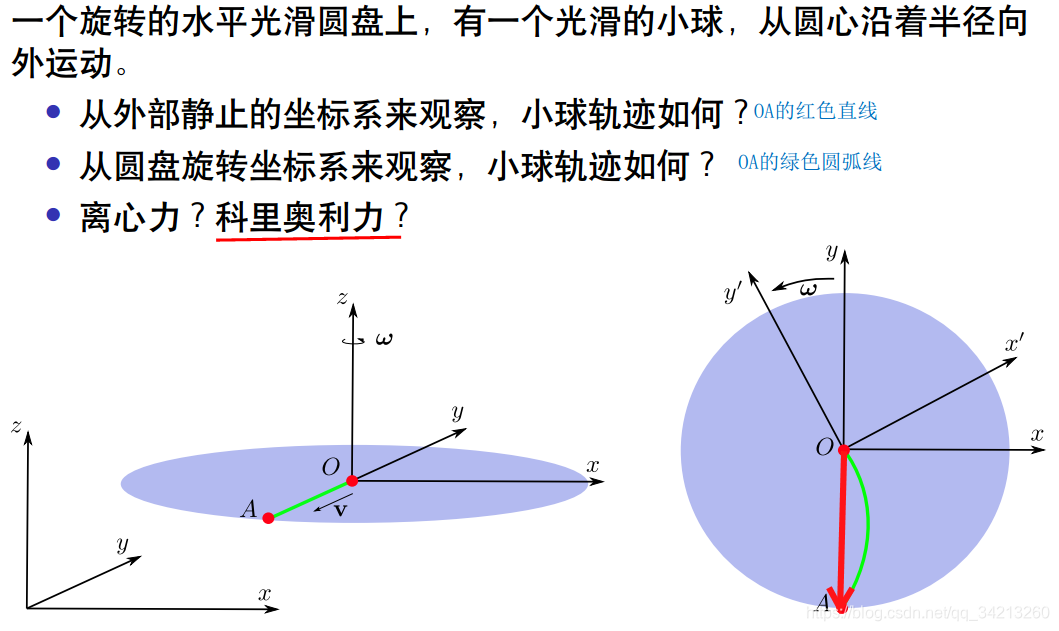
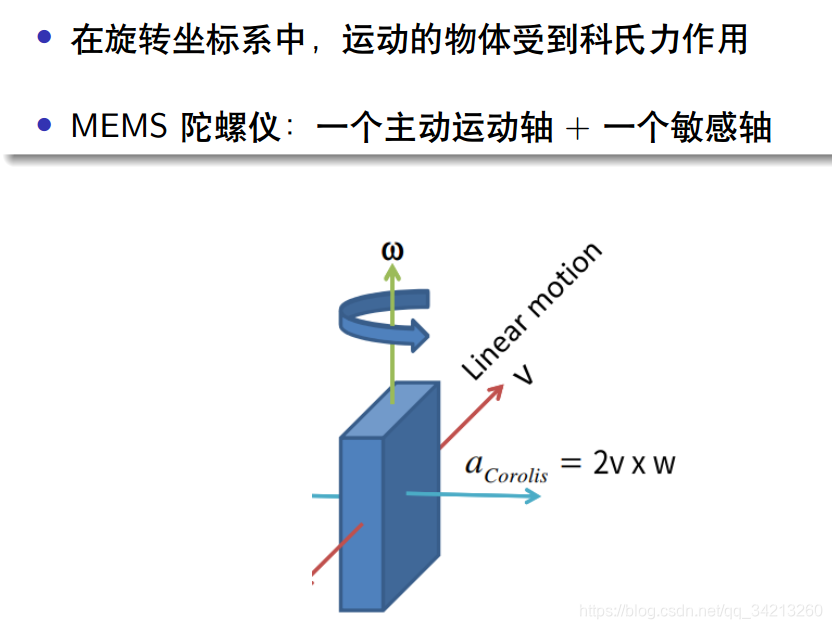
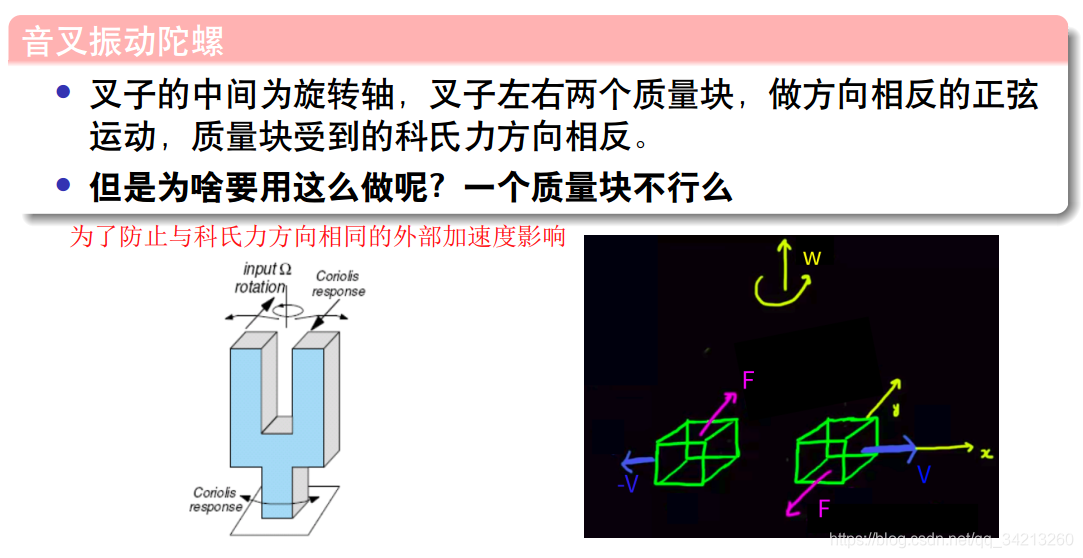
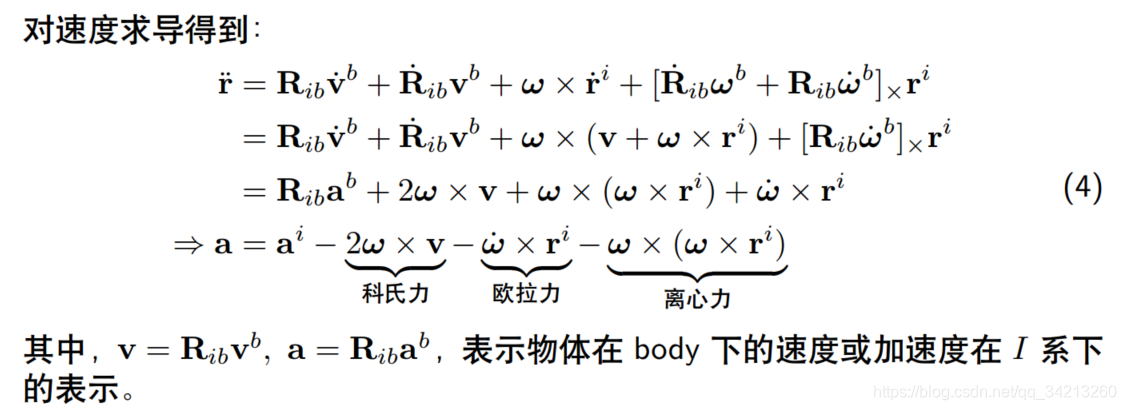 在旋轉坐標系下觀察,運動的物體(運動方向和旋轉軸不為同一個軸時)會受到科氏力的作用。
在旋轉坐標系下觀察,運動的物體(運動方向和旋轉軸不為同一個軸時)會受到科氏力的作用。
二、IMU 測量模型及運動模型
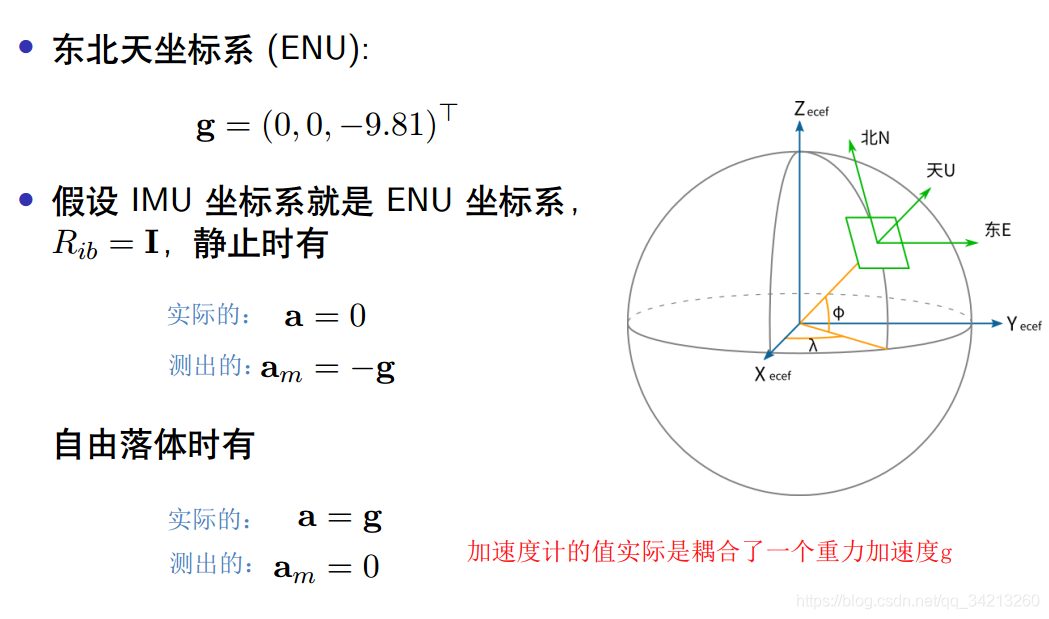
2.1 MEMS(Micro-electromechanical Systems微電子機械系統) 加速度計工作原理
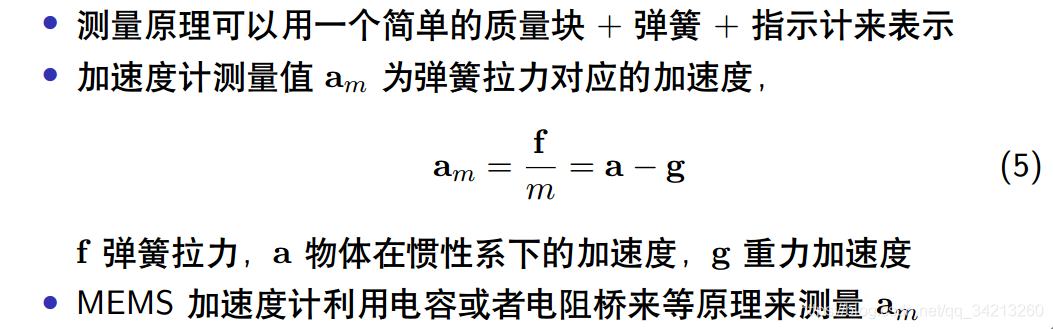
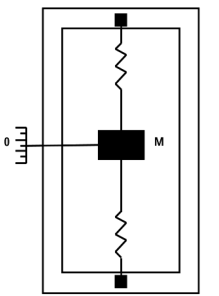
加速度變化,引起質量塊位置的變化,引起電阻電容的變化。
2.2 MEMS(Micro-electromechanical Systems微電子機械系統) 陀螺儀測量原理
? 陀螺儀主要用來測量物體的旋轉角速度,按測量原理分有振動陀螺,光纖陀螺等。
? 低端 MEMS 陀螺上一般采用振動陀螺原理,通過測量 Coriolis force(科氏力) 來間接得到角速度。

 加速度計當然也會受到科氏力影響,但是因為加速度計的質量塊并不含有主動驅動的旋轉運動。因此,一般情況下ω->0, 在精度要求不高的情況下,科氏力對加速度的影響可以忽略不記。
加速度計當然也會受到科氏力影響,但是因為加速度計的質量塊并不含有主動驅動的旋轉運動。因此,一般情況下ω->0, 在精度要求不高的情況下,科氏力對加速度的影響可以忽略不記。
三、IMU 誤差模型
3.1 誤差分類
? 加速度計和陀螺儀的誤差可以分為:確定性誤差,隨機誤差。
? 確定性誤差可以事先標定確定,包括: bias, scale ...
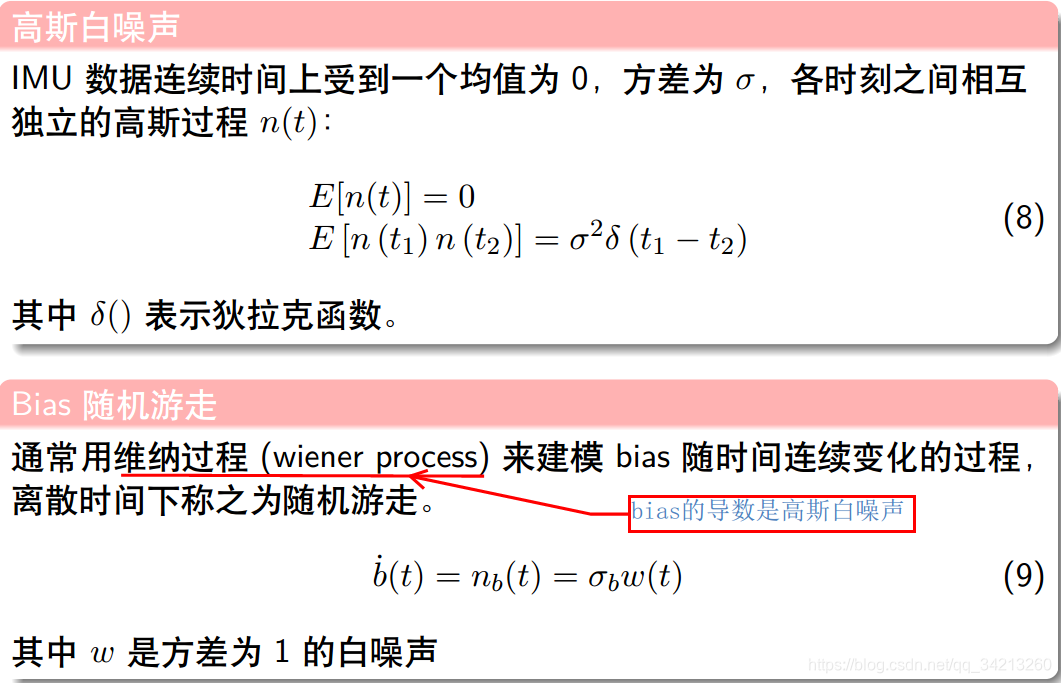
? 隨機誤差通常假設噪聲服從高斯分布,確定其方差大小,包括:高斯白噪聲, bias隨機游走...
3.2 確定性誤差
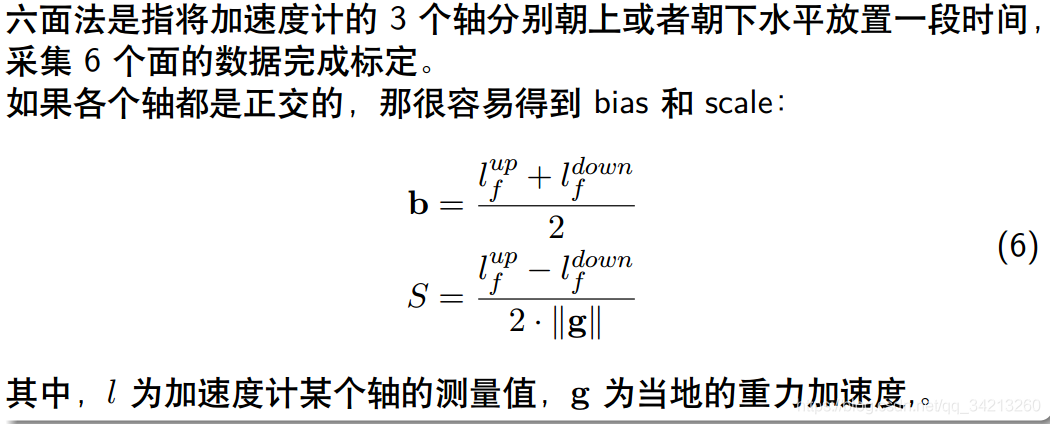
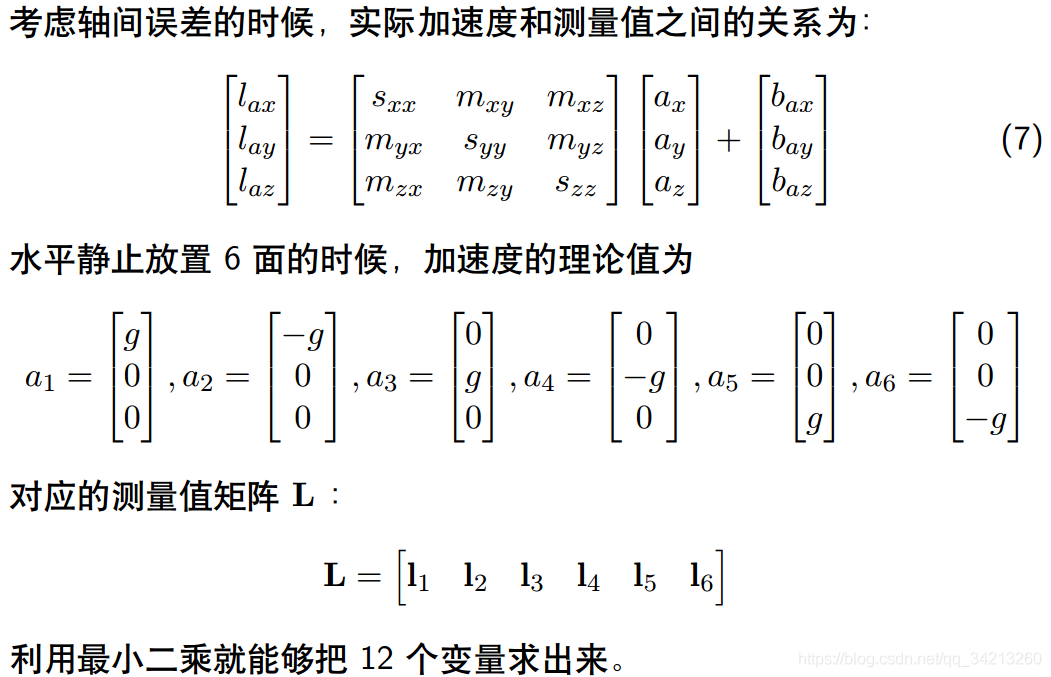
3.2.1 六面法標定加速度 bias 和 scale factor
 最小二乘原理可以參考我的另一篇博文:
最小二乘原理可以參考我的另一篇博文:
http://www.rzrgm.cn/long5683/p/12073813.html
3.2.2 六面法標定陀螺儀 bias 和 scale factor
和加速度計六面法類似,只是陀螺儀的真實值由高精度轉臺提供,這
里的 6 面是指各個軸順時針和逆時針旋轉。
3.2.3 溫度相關的參數標定
3.3 隨機誤差
3.3.1 隨機誤差的離散化
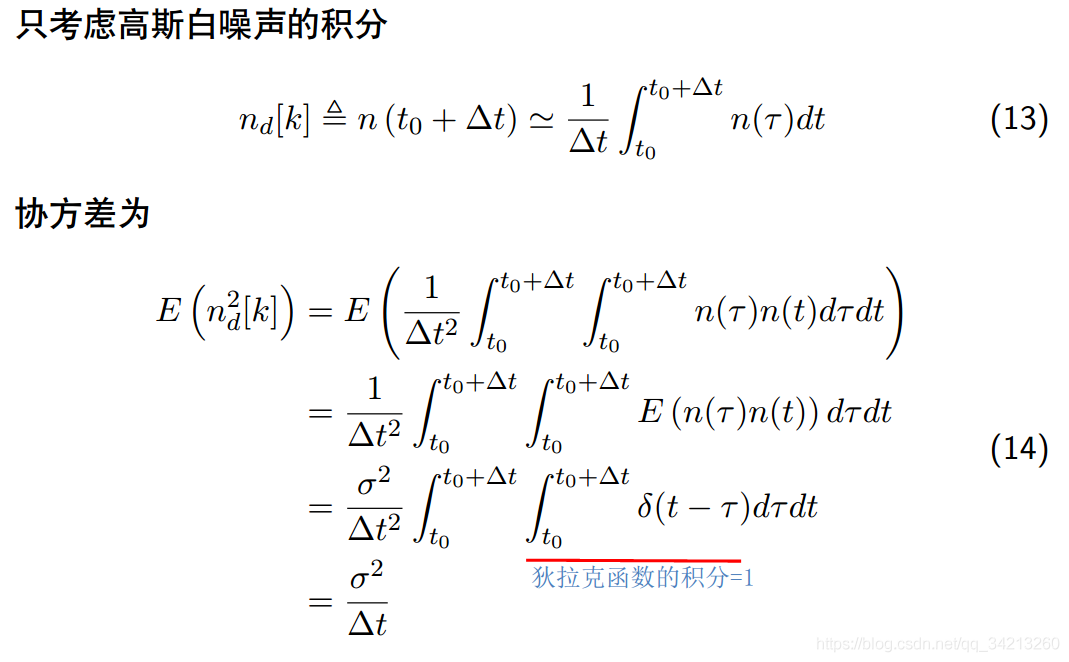
實際上, IMU 傳感器獲取的數據為離散采樣,因此需要進行離散化
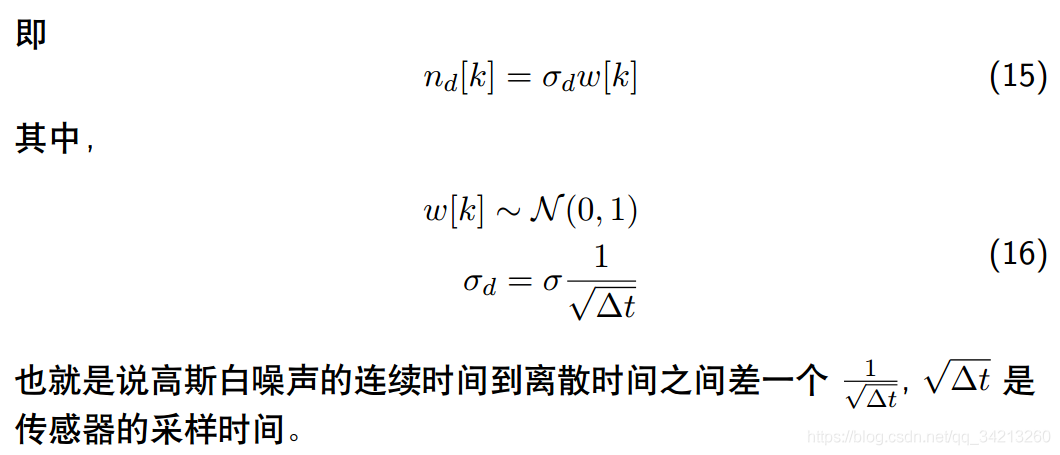
1. 高斯白噪聲的離散化
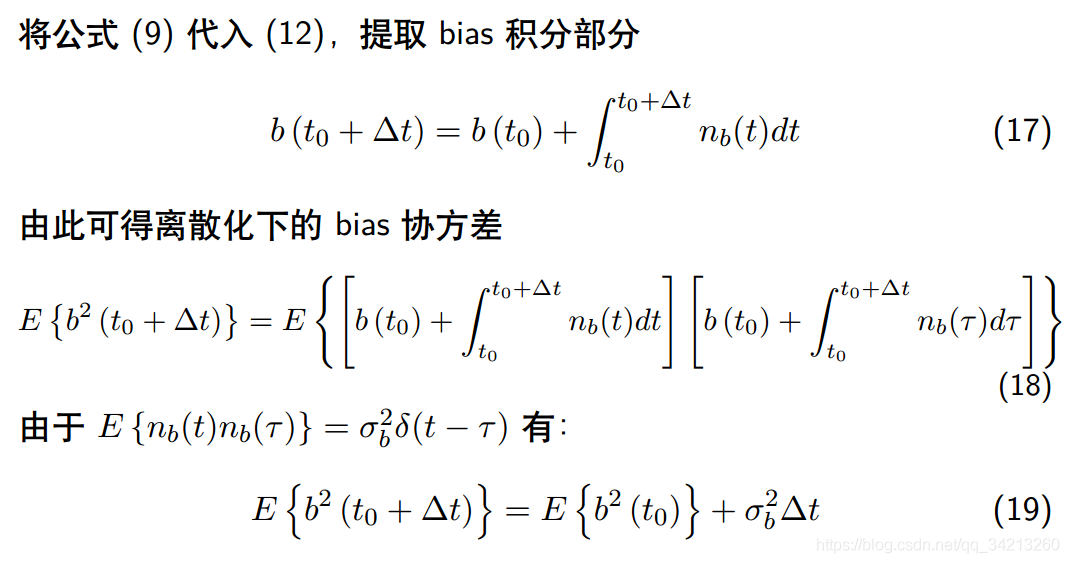
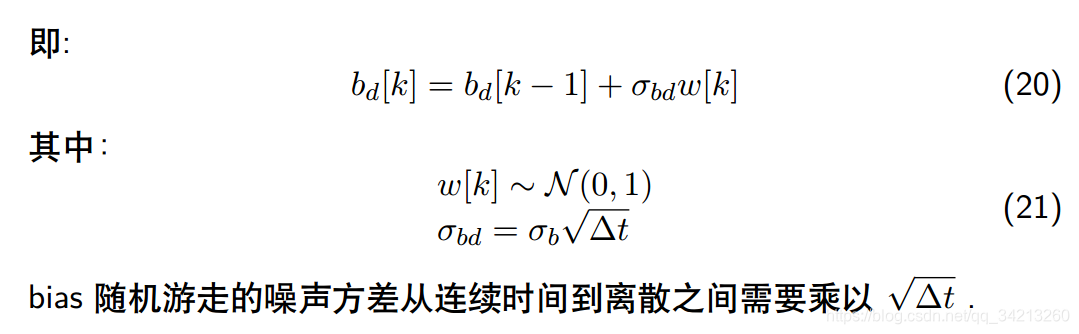
2. bias 隨機游走的離散化
 更詳細的連續到離散的推導參見:
更詳細的連續到離散的推導參見:
John L Crassidis. “Sigma-point Kalman fltering for integrated GPS and inertial navigation”. In: IEEE Transactions on Aerospace and Electronic Systems 42.2 (2006), pp. 750–756.
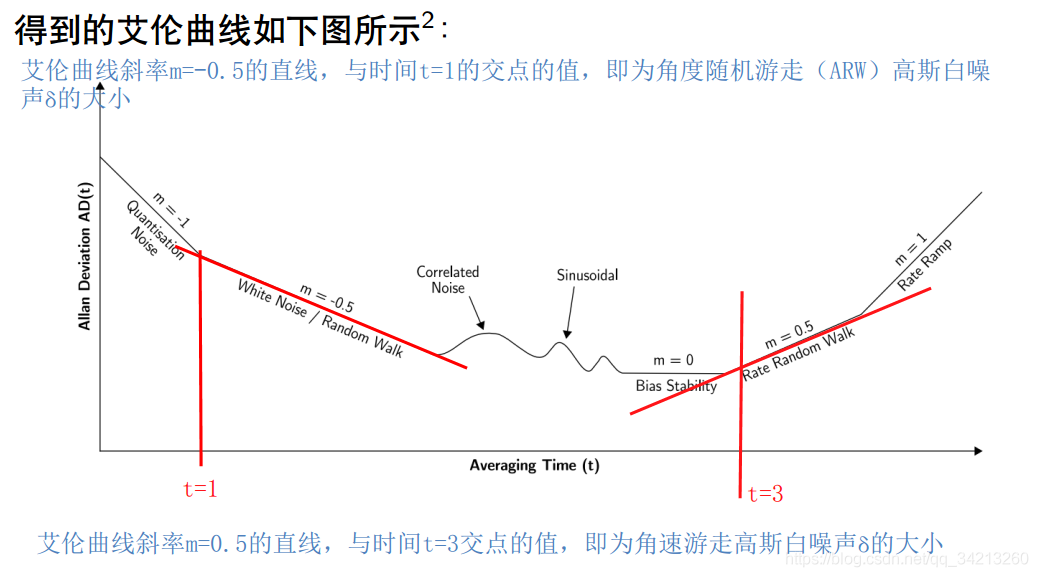
3.3.2 IMU 隨機誤差的標定
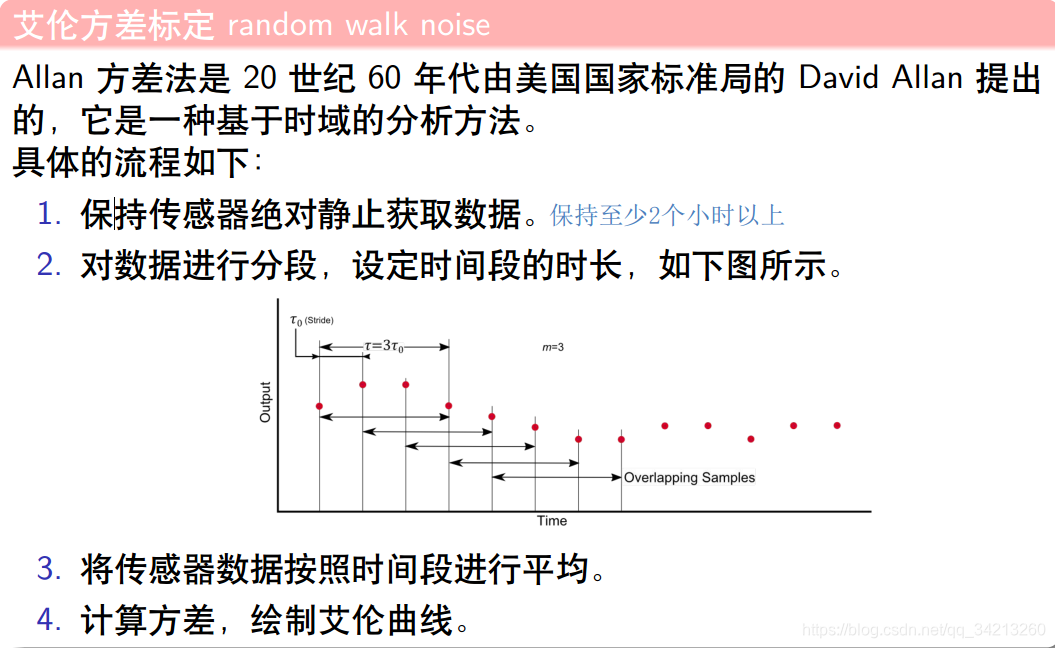
 詳細可參考:
詳細可參考:
Allan Variance. “Noise Analysis for Gyroscopes”. In: Freescale Semiconductor Document Number: AN5087 Application Note Rev. 0 2 (2015)
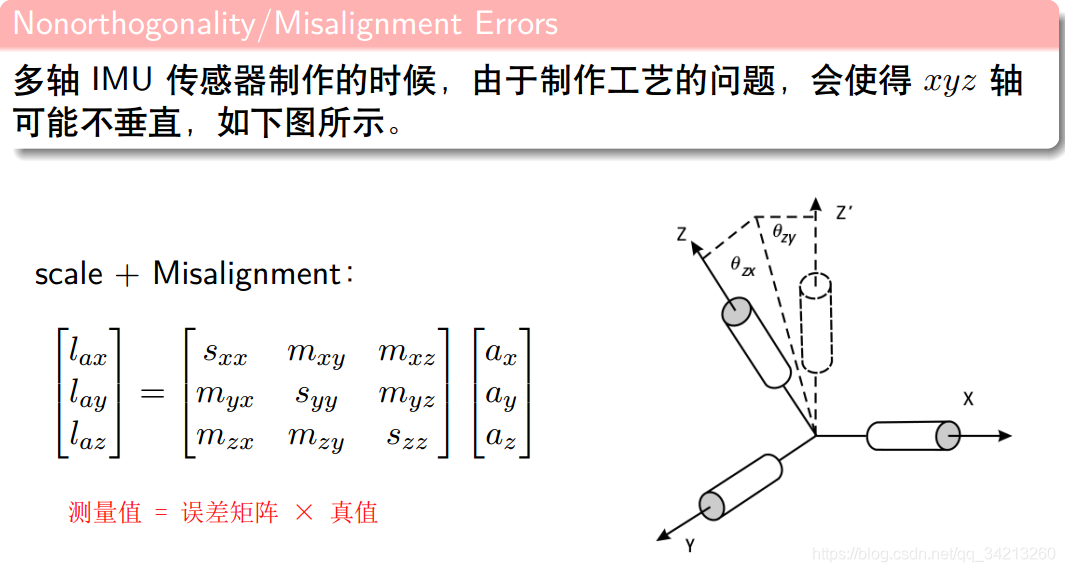
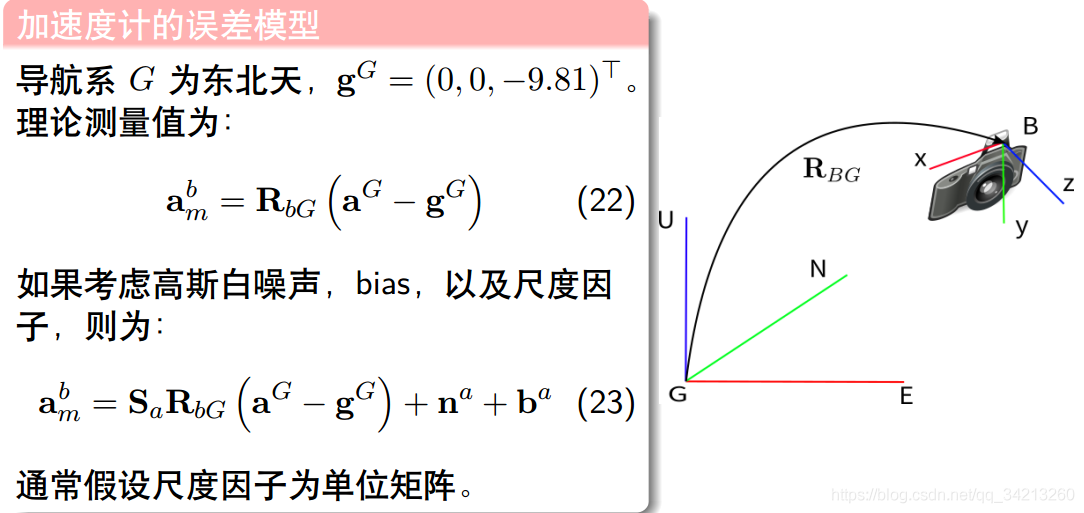
3.4 加速度計的誤差模型總結
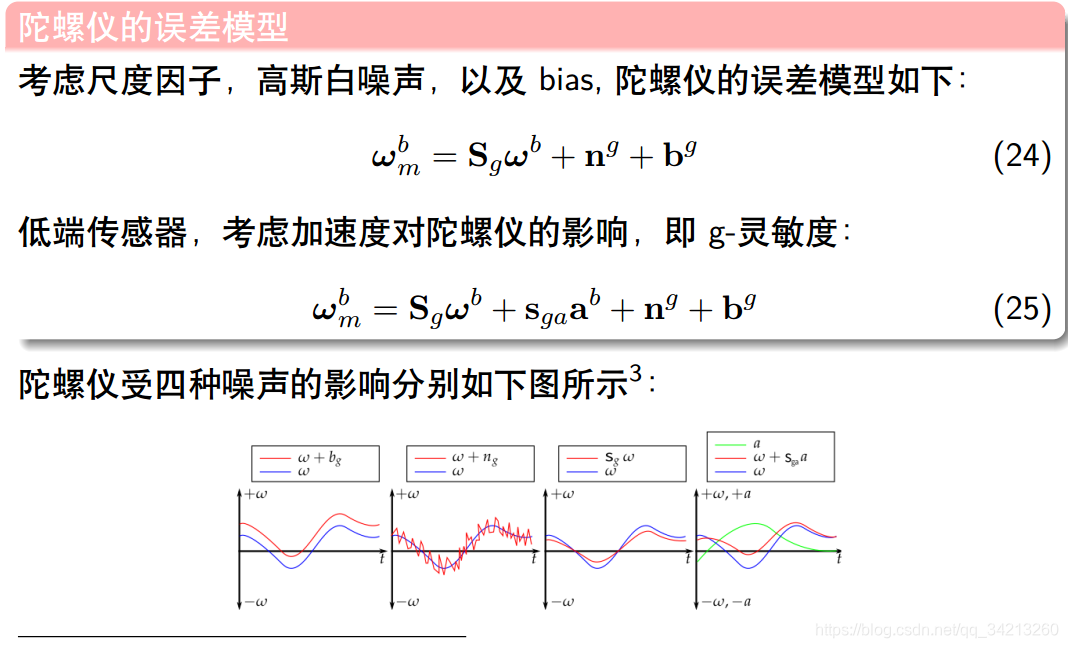
3.5 陀螺儀的誤差模型總結
 詳細內容參考:MA Shelley. “Monocular visual inertial odometry on a mobile device”. In: Master’s thesis, Institut für Informatik, TUMünchen, Germany (2014)
詳細內容參考:MA Shelley. “Monocular visual inertial odometry on a mobile device”. In: Master’s thesis, Institut für Informatik, TUMünchen, Germany (2014)
四、運動模型(預積分模型)離散時間處理
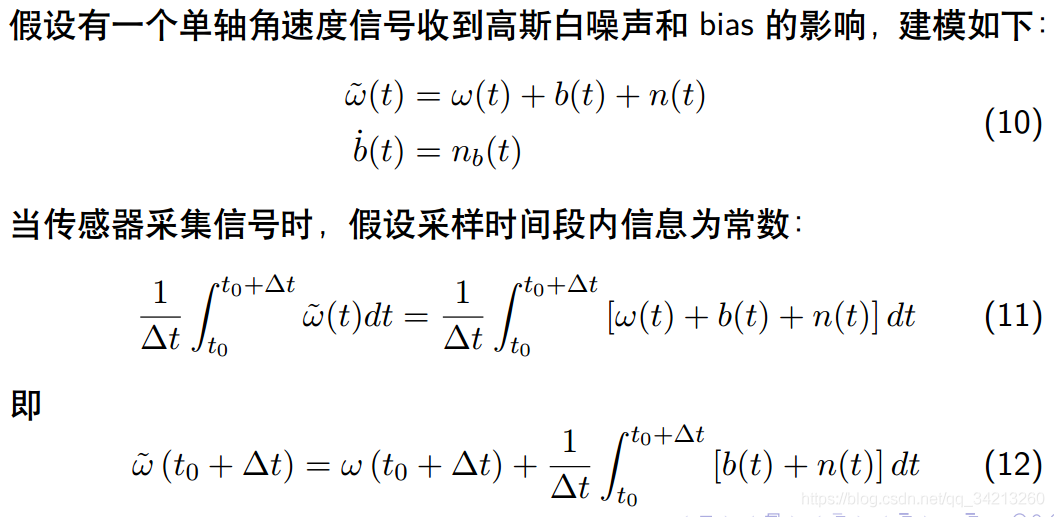
4.1 IMU 模型
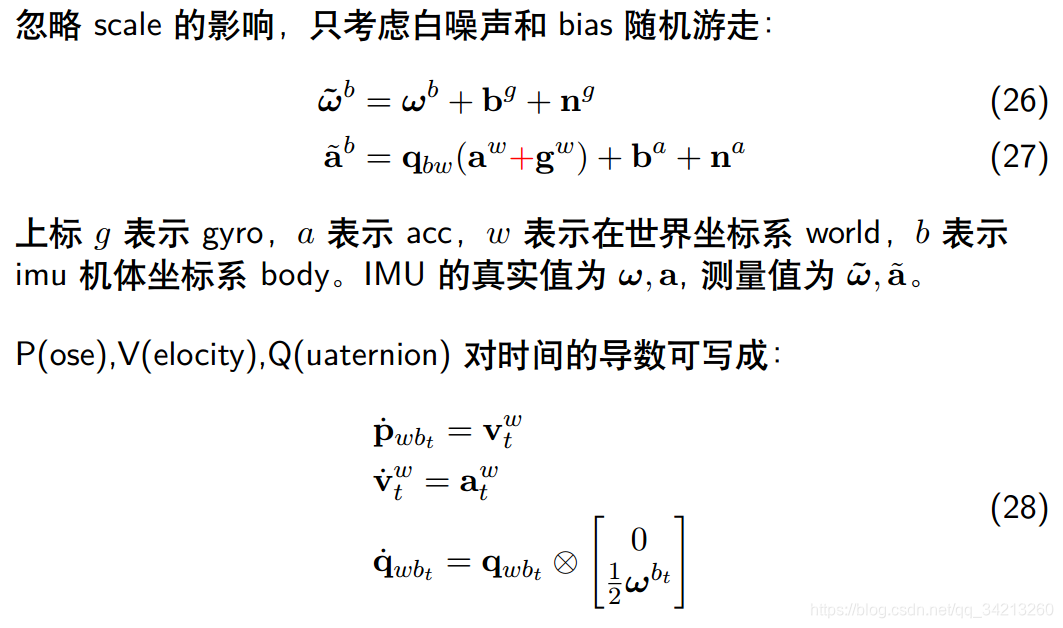
4.2 連續時間下 IMU 運動模型
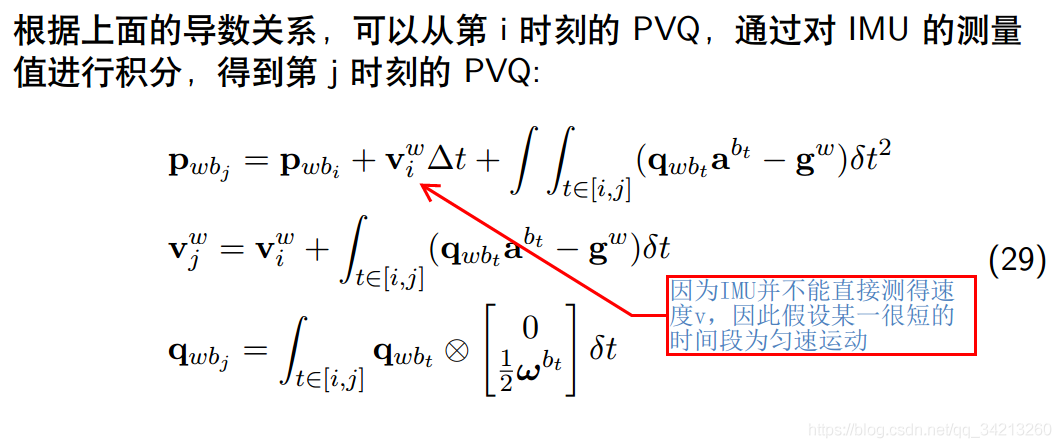
4.3 運動模型的離散積分——歐拉法
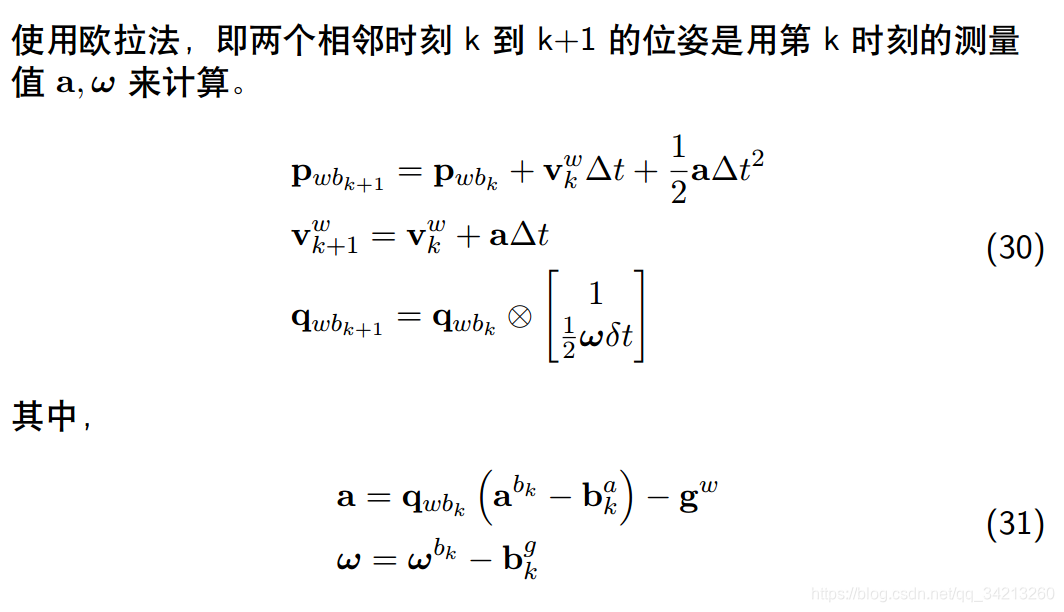 \({\mathbf{q}}_{w b_{t+1}}={\mathbf{q}}_{w b_{t}}+\dot{\mathbf{q}}_{w b_{t}}\times\Delta t=\mathbf{q}_{w b_{t}} \otimes\left[\begin{array}{c}1 \\ 0\end{array}\right]+\mathbf{q}_{w b_{t}} \otimes\left[\begin{array}{c}0 \\ \frac{1}{2} \omega^{b_{t}}\end{array}\right]=\mathbf{q}_{w b_{k}} \otimes\left[\begin{array}{c}
1 \\
\frac{1}{2} \omega \delta t
\end{array}\right]\)
\({\mathbf{q}}_{w b_{t+1}}={\mathbf{q}}_{w b_{t}}+\dot{\mathbf{q}}_{w b_{t}}\times\Delta t=\mathbf{q}_{w b_{t}} \otimes\left[\begin{array}{c}1 \\ 0\end{array}\right]+\mathbf{q}_{w b_{t}} \otimes\left[\begin{array}{c}0 \\ \frac{1}{2} \omega^{b_{t}}\end{array}\right]=\mathbf{q}_{w b_{k}} \otimes\left[\begin{array}{c}
1 \\
\frac{1}{2} \omega \delta t
\end{array}\right]\)
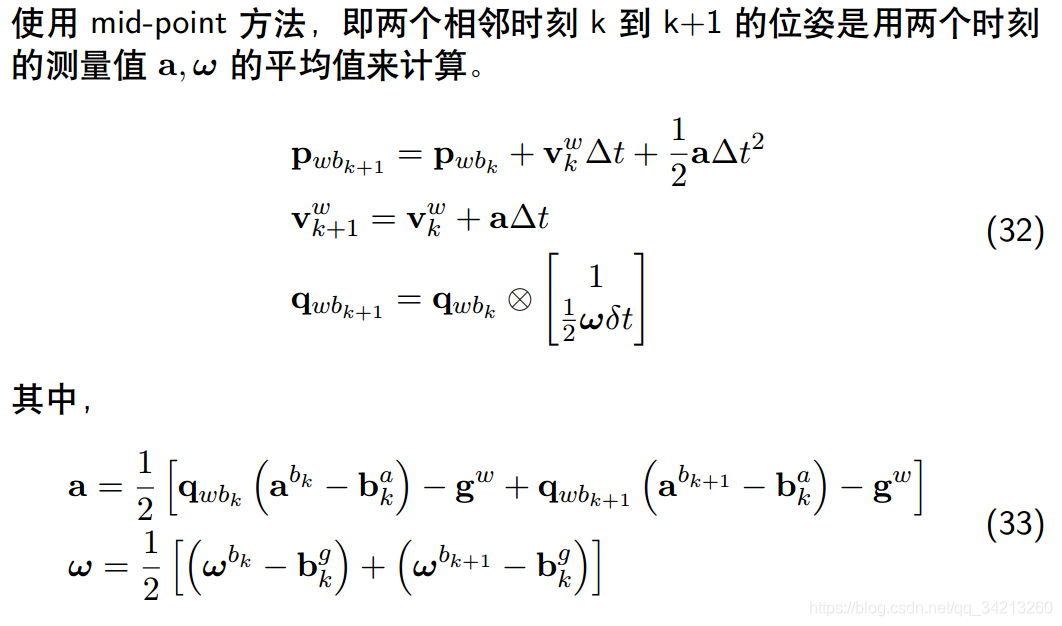
4.3 運動模型的離散積分——中值法
4.4 李代數表示的運動模型





太多了就不一一放上來了,重點看文檔《預積分總結與公式推導》
參考鏈接
http://www.rzrgm.cn/JingeTU/p/9048986.html // 部分公式推導錯誤
http://paopaorobot.org/bbs/read.php?tid=181&fid=5

 浙公網安備 33010602011771號
浙公網安備 33010602011771號