

《機(jī)器人SLAM導(dǎo)航核心技術(shù)與實戰(zhàn)》第1季:第12章_典型自主導(dǎo)航系統(tǒng)
《機(jī)器人SLAM導(dǎo)航核心技術(shù)與實戰(zhàn)》第1季:第12章_典型自主導(dǎo)航系統(tǒng)
視頻講解
第1季:第12章_典型自主導(dǎo)航系統(tǒng)
-
先 導(dǎo) 課
-
第 1 季 : 快 速 梳 理 知 識 要 點 與 學(xué) 習(xí) 方 法
-
第 2 季 : 詳 細(xì) 推 導(dǎo) 數(shù) 學(xué) 公 式 與 代 碼 解 析
-
第 3 季 : 代 碼 實 操 以 及 真 實 機(jī) 器 人 調(diào) 試
-
答 疑 課
------(永 久 免 費 ● 系 列 課 程 ● 長 期 更 新)------
添加圖片注釋,不超過 140 字(可選)
本書內(nèi)容安排

添加圖片注釋,不超過 140 字(可選)
添加圖片注釋,不超過 140 字(可選)
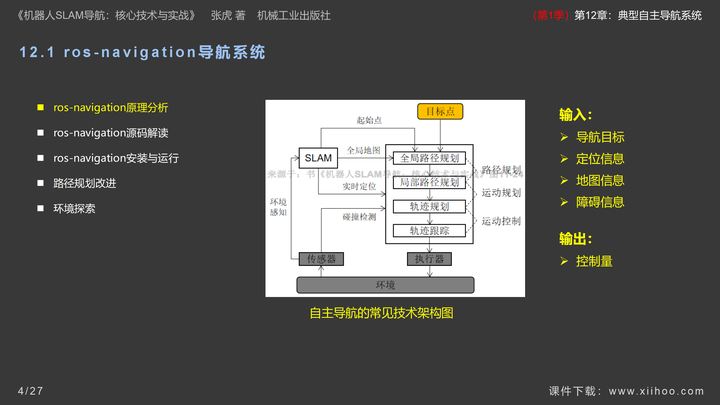
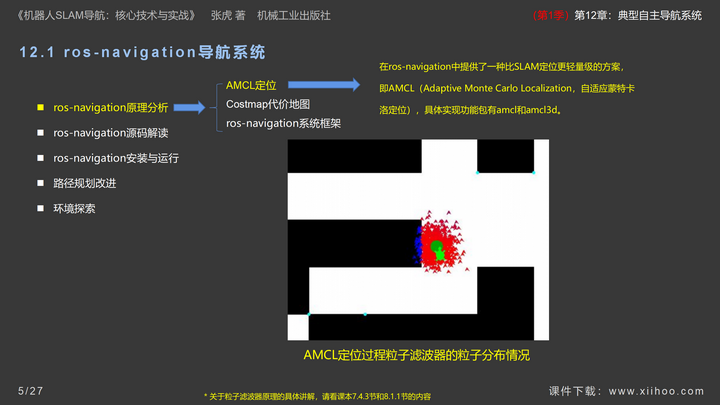
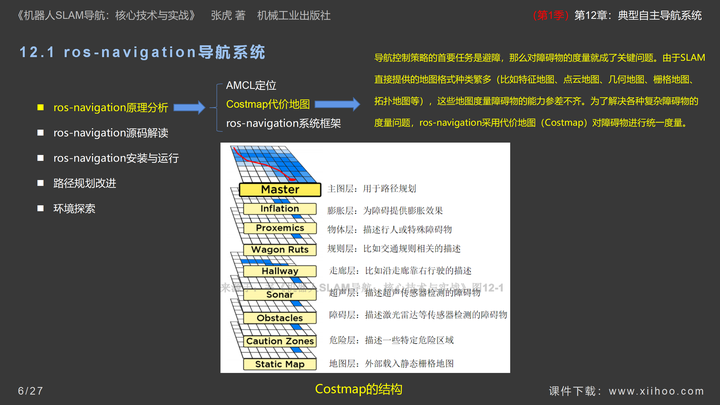
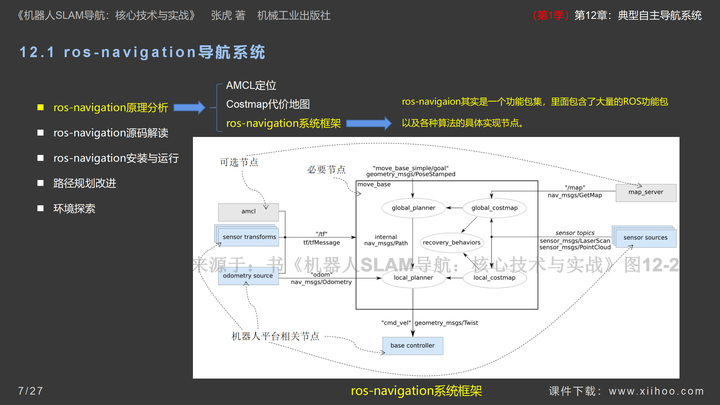
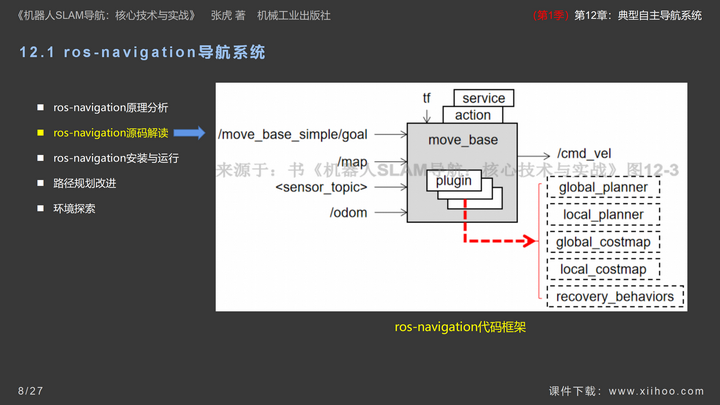
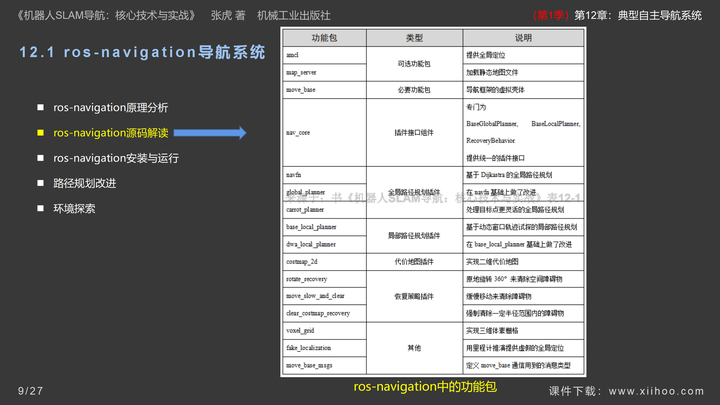
12.1 ros-navigation導(dǎo)航系統(tǒng)
①ros-navigation原理分析
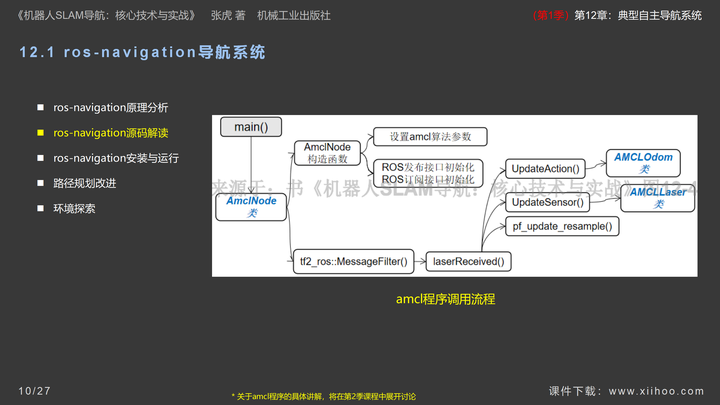
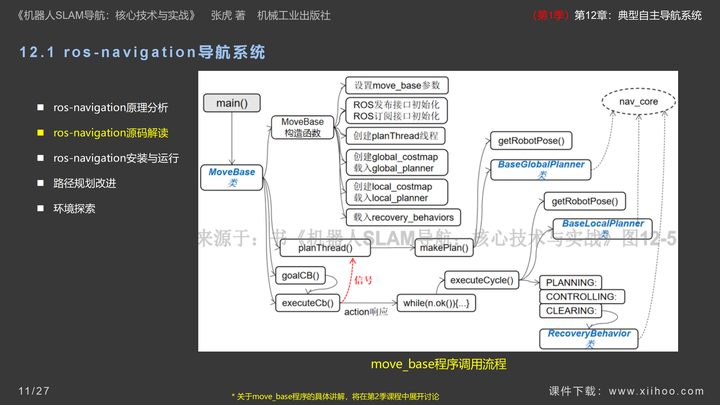
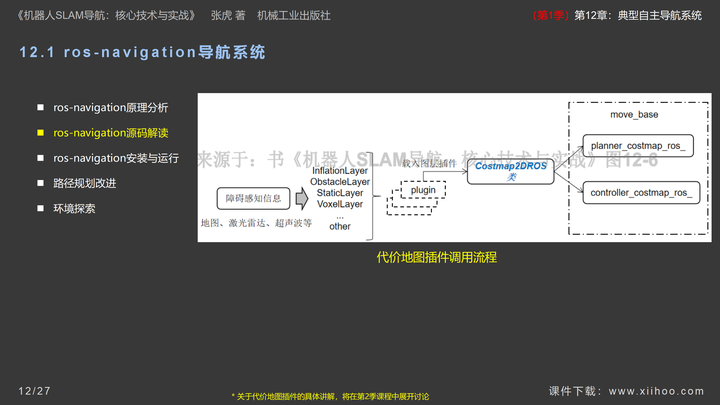
②ros-navigation源碼解讀
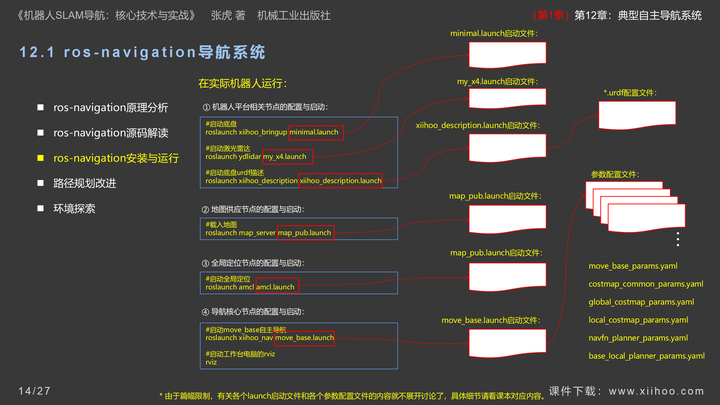
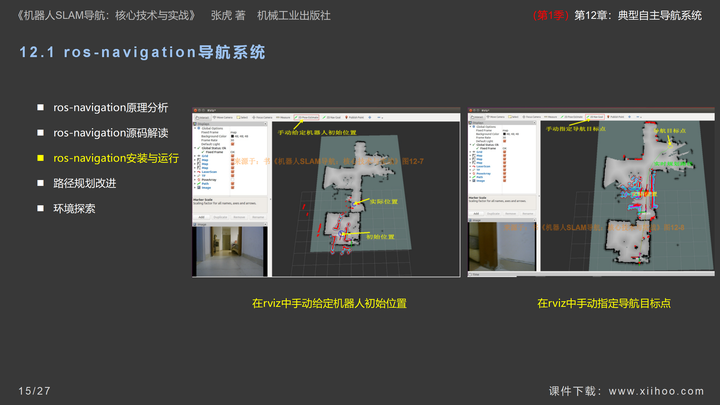
③ros-navigation安裝與運行
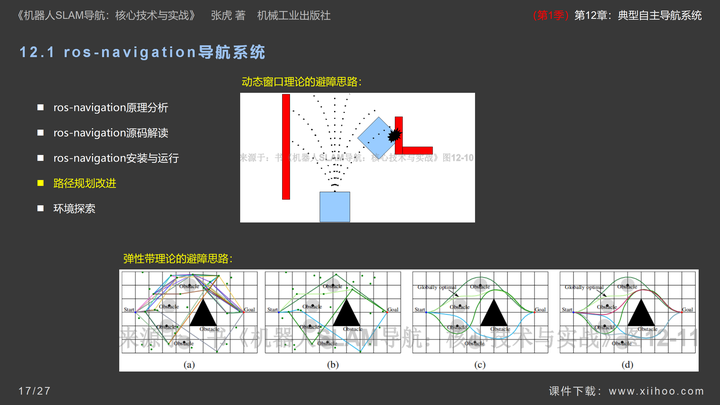
④路徑規(guī)劃改進(jìn)
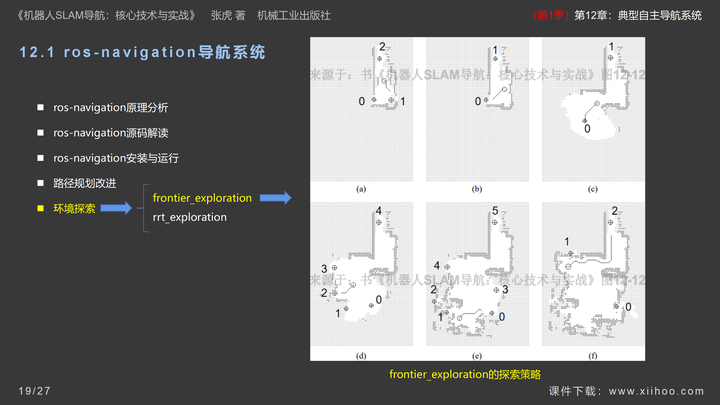
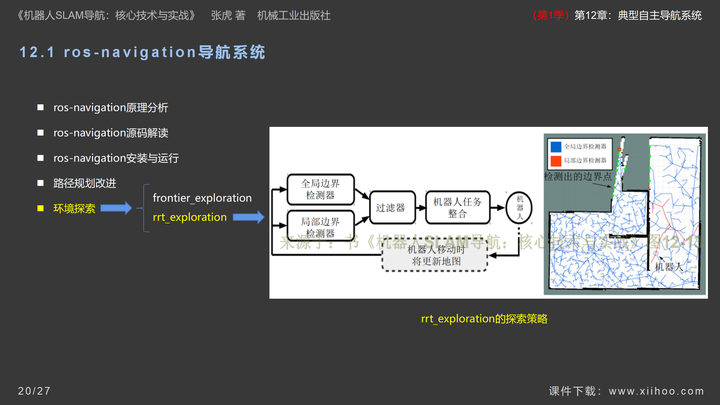
⑤環(huán)境探索
添加圖片注釋,不超過 140 字(可選)
添加圖片注釋,不超過 140 字(可選)
添加圖片注釋,不超過 140 字(可選)
添加圖片注釋,不超過 140 字(可選)
添加圖片注釋,不超過 140 字(可選)
添加圖片注釋,不超過 140 字(可選)
添加圖片注釋,不超過 140 字(可選)
添加圖片注釋,不超過 140 字(可選)
添加圖片注釋,不超過 140 字(可選)

添加圖片注釋,不超過 140 字(可選)
添加圖片注釋,不超過 140 字(可選)
添加圖片注釋,不超過 140 字(可選)
添加圖片注釋,不超過 140 字(可選)
添加圖片注釋,不超過 140 字(可選)
添加圖片注釋,不超過 140 字(可選)
添加圖片注釋,不超過 140 字(可選)
添加圖片注釋,不超過 140 字(可選)
12.2 riskrrt導(dǎo)航系統(tǒng)
對于大多數(shù)ROS學(xué)習(xí)者,最先接觸到的導(dǎo)航系統(tǒng)基本都是ros-navigation。不過機(jī)器人領(lǐng)域的導(dǎo)航系統(tǒng)實現(xiàn)并不只有ros-navigation,這里要介紹的riskrrt就是另外一種導(dǎo)航系統(tǒng)實現(xiàn)。
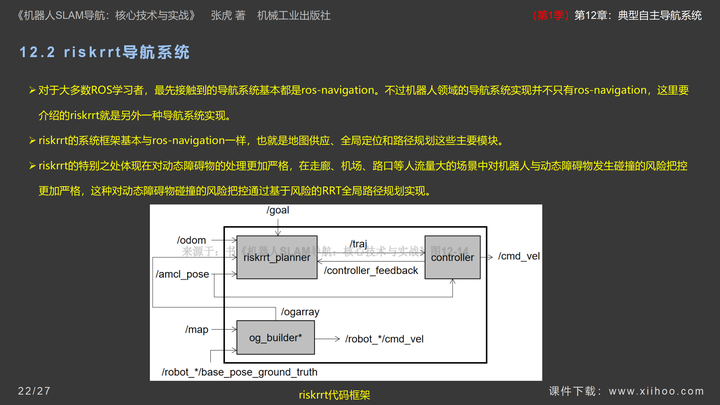
riskrrt的系統(tǒng)框架基本與ros-navigation一樣,也就是地圖供應(yīng)、全局定位和路徑規(guī)劃這些主要模塊。
riskrrt的特別之處體現(xiàn)在對動態(tài)障礙物的處理更加嚴(yán)格,在走廊、機(jī)場、路口等人流量大的場景中對機(jī)器人與動態(tài)障礙物發(fā)生碰撞的風(fēng)險把控更加嚴(yán)格,這種對動態(tài)障礙物碰撞的風(fēng)險把控通過基于風(fēng)險的RRT全局路徑規(guī)劃實現(xiàn)。
添加圖片注釋,不超過 140 字(可選)
12.3 autoware導(dǎo)航系統(tǒng)
ros-navigation和riskrrt導(dǎo)航系統(tǒng)主要都是用于機(jī)器人的低速導(dǎo)航,并且大多基于2D地圖。
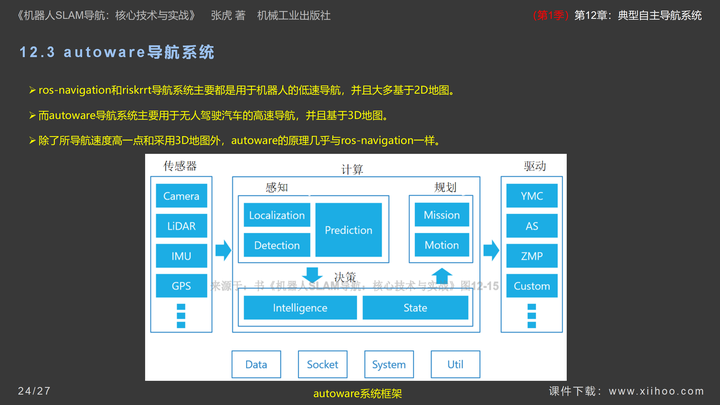
而autoware導(dǎo)航系統(tǒng)主要用于無人駕駛汽車的高速導(dǎo)航,并且基于3D地圖。
除了所導(dǎo)航速度高一點和采用3D地圖外,autoware的原理幾乎與ros-navigation一樣。
添加圖片注釋,不超過 140 字(可選)
12.4 導(dǎo)航系統(tǒng)面臨的一些挑戰(zhàn)
立體障礙物是機(jī)器人導(dǎo)航中很頭疼的一個問題,因為2D激光雷達(dá)只能掃描某個平面內(nèi)的障礙物,對于高于或低于掃描平面的障礙物是無法探測的。比如一個很矮的掃地機(jī)器人能從桌子底下穿過去,而在掃地機(jī)器人上安裝一個較高的貨架后就會導(dǎo)致碰撞。很自然會想到在機(jī)器人不同高度不同方向都裝上傳感器,這樣就能避免因個別傳感器探測盲區(qū)而發(fā)生碰撞了。但將機(jī)器人的全身都覆蓋上傳感器顯然不現(xiàn)實,并且傳感器本身也有探測距離和視角的盲區(qū)問題。
玻璃類型的透明障礙物、鏡面反射障礙物、場景多徑效應(yīng)、強(qiáng)光煙霧干擾等因素,都會導(dǎo)致激光雷達(dá)或相機(jī)的探測失靈。在這種情況下,如何保證機(jī)器人的安全也是個棘手的問題。另外一些特殊的情況,比如機(jī)器人在下斜坡時地面如何從障礙描述中分離也是個問題。
還有就是路徑規(guī)劃和軌跡跟蹤都強(qiáng)依賴于全局定位,當(dāng)機(jī)器人全局定位丟失后,路徑規(guī)劃和軌跡跟蹤將直接奔潰,那么導(dǎo)航系統(tǒng)的穩(wěn)定性怎么保證也是個大問題。
添加圖片注釋,不超過 140 字(可選)
例程源碼下載
-
Gitee下載(國內(nèi)訪問速度快):gitee.com/xiihoo-robot/Books_Robot_SLAM_Navigation
本作品為”cnblogs@小虎哥哥愛學(xué)習(xí)"的原創(chuàng)文章,禁止任何形式的轉(zhuǎn)載及抄錄,侵權(quán)違法行為必究到底

 浙公網(wǎng)安備 33010602011771號
浙公網(wǎng)安備 33010602011771號