

《機(jī)器人SLAM導(dǎo)航核心技術(shù)與實戰(zhàn)》先導(dǎo)課:SLAM的應(yīng)用價值與技術(shù)難點
《機(jī)器人SLAM導(dǎo)航核心技術(shù)與實戰(zhàn)》先導(dǎo)課:SLAM的應(yīng)用價值與技術(shù)難點
視頻講解
先導(dǎo)課:SLAM的應(yīng)用價值與技術(shù)難點
-
先 導(dǎo) 課
-
第 1 季 : 快 速 梳 理 知 識 要 點 與 學(xué) 習(xí) 方 法
-
第 2 季 : 詳 細(xì) 推 導(dǎo) 數(shù) 學(xué) 公 式 與 代 碼 解 析
-
第 3 季 : 代 碼 實 操 以 及 真 實 機(jī) 器 人 調(diào) 試
-
答 疑 課
------(永 久 免 費(fèi) ● 系 列 課 程 ● 長 期 更 新)------
?
本書內(nèi)容安排

?
內(nèi)容概要
?
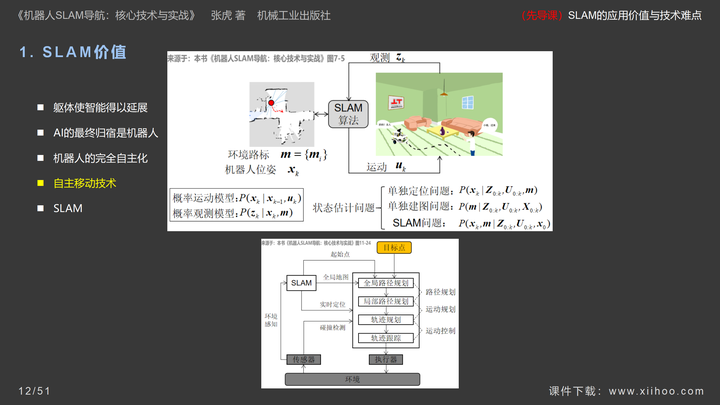
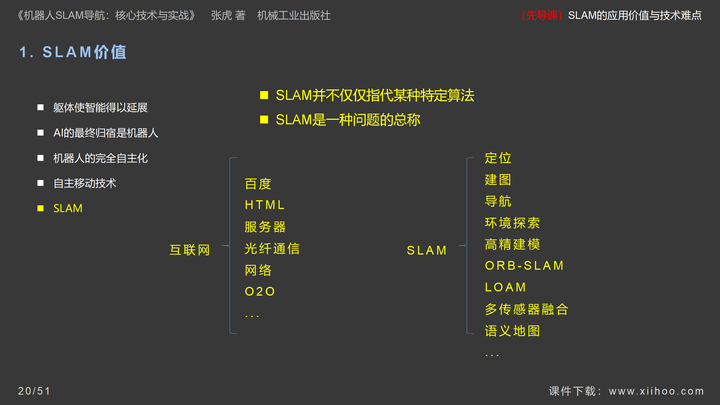
1. SLAM價值
-
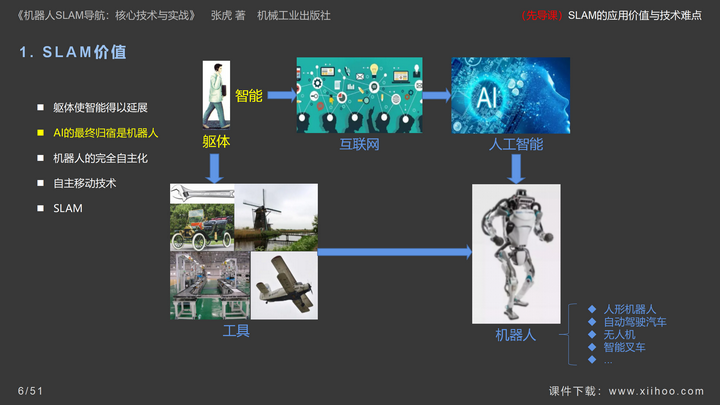
軀體使智能得以延展
-
AI的最終歸宿是機(jī)器人
-
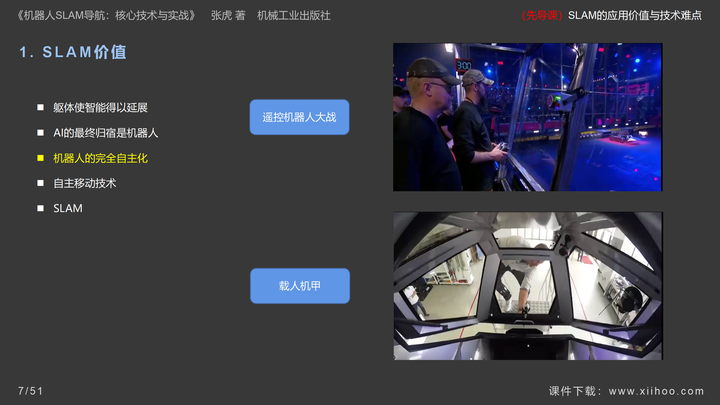
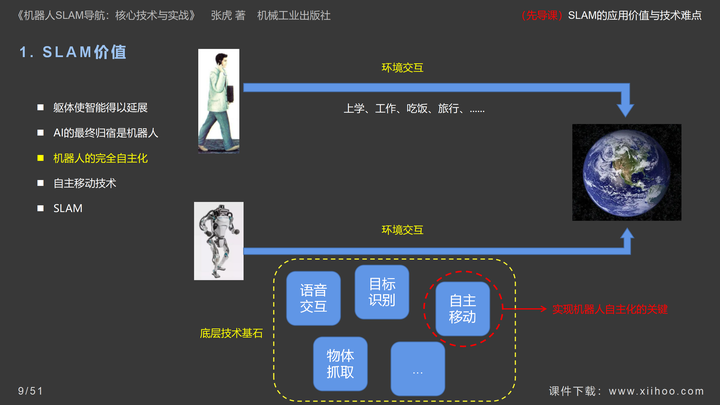
機(jī)器人的完全自主化
-
自主移動技術(shù)
-
SLAM

?
?
?
?
?
?
?
?

?
?

?

?

?

?

?

?

?
?
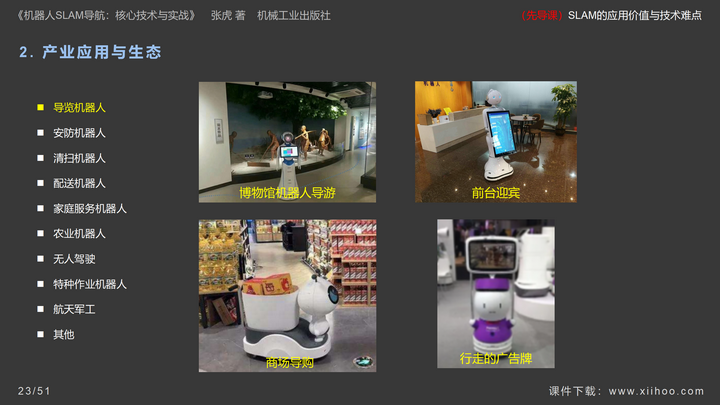
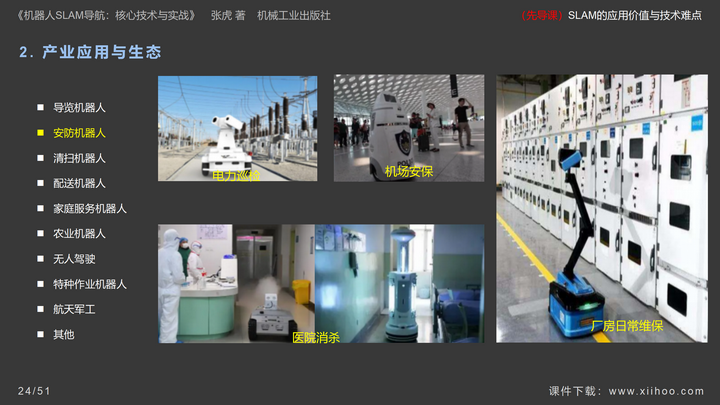
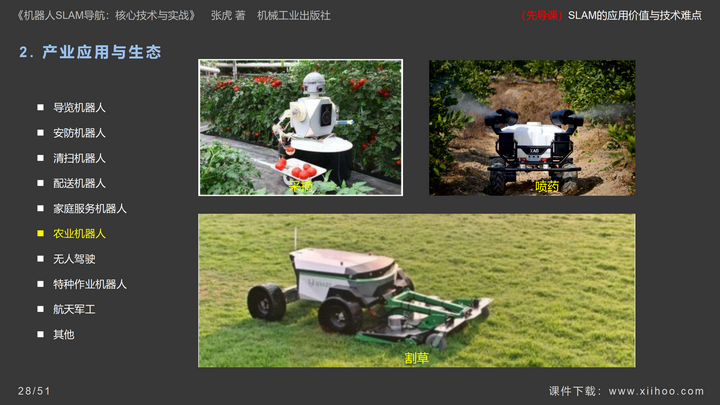
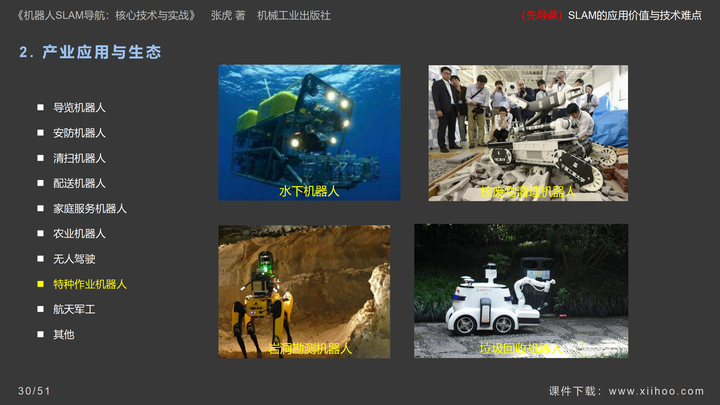
2. 產(chǎn)業(yè)應(yīng)用與生態(tài)
-
導(dǎo)覽機(jī)器人
-
安防機(jī)器人
-
清掃機(jī)器人
-
配送機(jī)器人
-
家庭服務(wù)機(jī)器人
-
農(nóng)業(yè)機(jī)器人
-
無人駕駛
-
特種作業(yè)機(jī)器人
-
航天軍工
-
其他

?
?
?

?

?

?
?

?
?

?

?
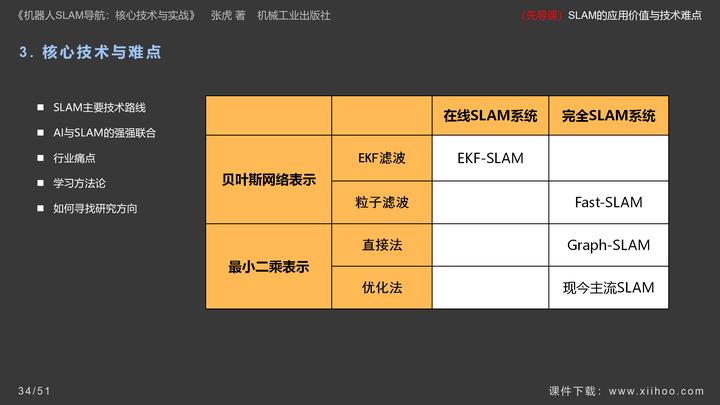
3. 核心技術(shù)與難點
-
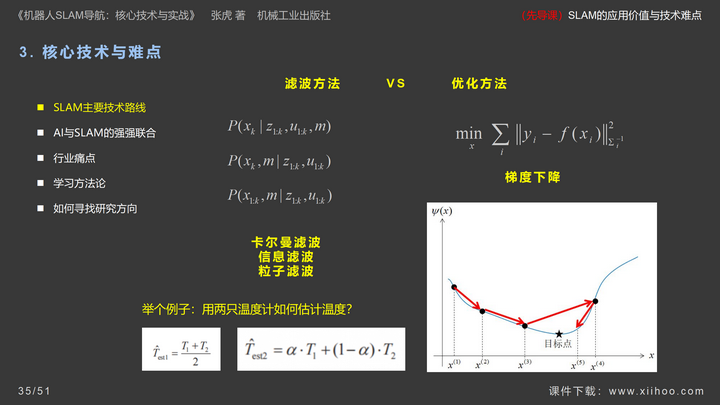
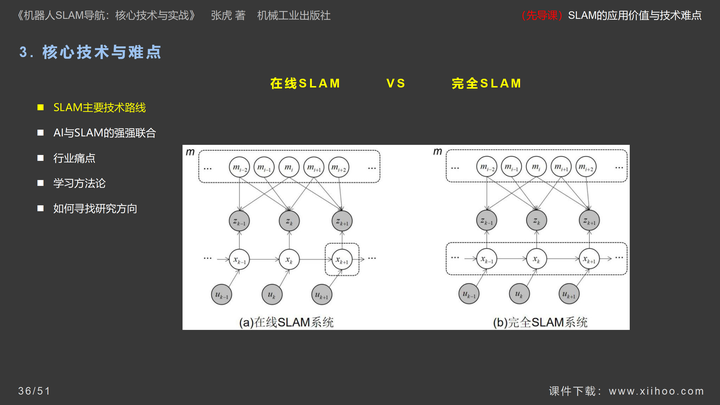
SLAM主要技術(shù)路線
-
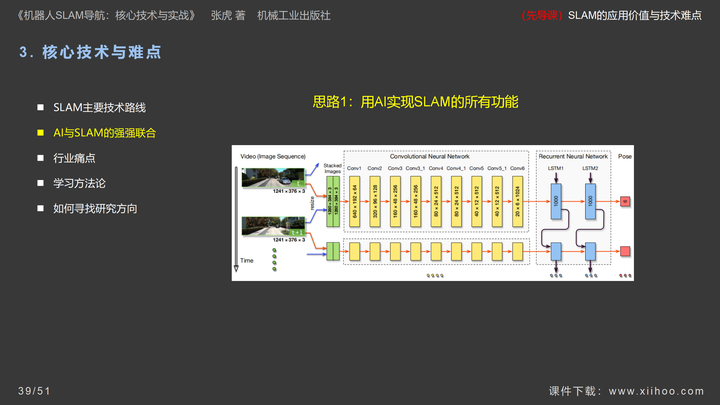
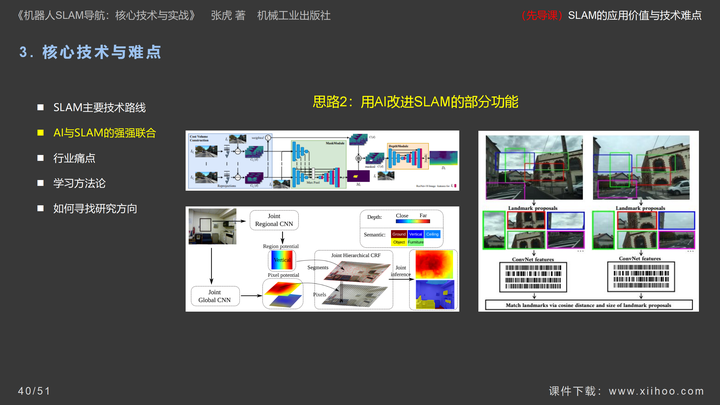
AI與SLAM的強(qiáng)強(qiáng)聯(lián)合
-
行業(yè)痛點
-
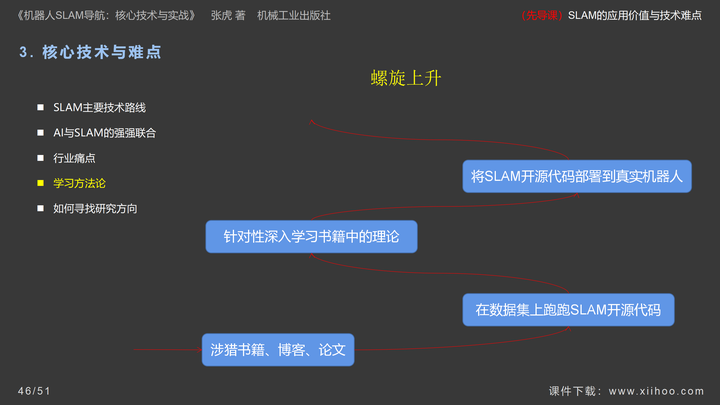
學(xué)習(xí)方法論
-
如何尋找研究方向
?
?
?

?
?
?
?

?

?

?

?
?
?
?

?
?
我給大家建議的研究方向:
-
發(fā)現(xiàn)新應(yīng)用領(lǐng)域:水下SLAM應(yīng)用、手動編輯SLAM地圖、SLAM云計算化
-
軟件工程的優(yōu)化:去ROS化、裸機(jī)級SLAM、跨平臺兼容
-
改進(jìn)SLAM某些功能模塊:特征提取新方法、閉環(huán)檢測可靠性、持久化建圖機(jī)制
-
多傳感器融合:傳感器標(biāo)定、時間戳同步、去干擾數(shù)據(jù)、數(shù)據(jù)關(guān)聯(lián)
-
AI+SLAM:端到端SLAM、語義SLAM、特征工程
-
克服異常場景:玻璃障礙物、傳感器盲區(qū)、光照變化、上下坡問題
例程源碼下載
-
Gitee下載(國內(nèi)訪問速度快):gitee.com/xiihoo-robot/Books_Robot_SLAM_Navigation
課件下載
-
PPT課件下載:
-
PDF課件下載:
本作品為”cnblogs@小虎哥哥愛學(xué)習(xí)"的原創(chuàng)文章,禁止任何形式的轉(zhuǎn)載及抄錄,侵權(quán)違法行為必究到底

 浙公網(wǎng)安備 33010602011771號
浙公網(wǎng)安備 33010602011771號