

SLAM+語音機器人DIY系列:(八)高階拓展——1.miiboo機器人安卓手機APP開發
溫馨提示
本篇文章已經收錄在我最新出版的書籍《機器人SLAM導航核心技術與實戰》,感興趣的讀者可以購買紙質書籍來進行更加深入和系統性的學習,購買鏈接如下:
android要與ROS通訊,一種是基于rosbridge,另一種是基于rosjava庫。
相關參考例子工程
rosbridge例子:
https://github.com/hibernate2011/RosClient
rosbridge(rosbridge_suite)是ros官方為開發者提供的一個用于非ros系統和ros系統進行交互通信的功能包。包括話題的訂閱,消息的發布,服務的調用,參數的設置和獲取,圖片信息的傳遞等等,都是JSON格式的字符串。獲取JSON字符串并將命令發送到ros,反之亦然。
rosjava例子:
https://github.com/rosjava/android_apps
https://github.com/rosjava/android_core
rosjava庫,這玩意兒類似于ROS官方支持的rospy roscpp等,也是ROS分布式計算平臺的一種language binding。
使用舉例:
以android_apps-kinetic為例,首先下載android_apps-kinetic工程https://github.com/rosjava/android_apps
Android Studio導入工程編譯運行

啟動登入界面:
保證手機跟Raspberry Pi 3連接同一個網絡,通過PC 獲取Raspberry Pi 3的IP=XXX.XXX.XXX.XXX
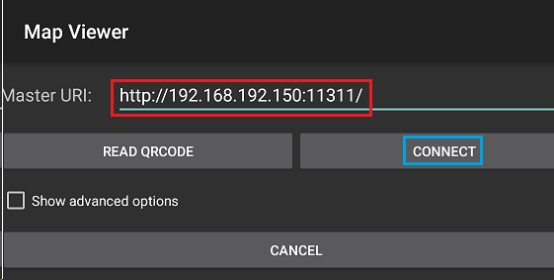
修改Master URI選擇roscore的URI 點擊CONNECT
主界面:
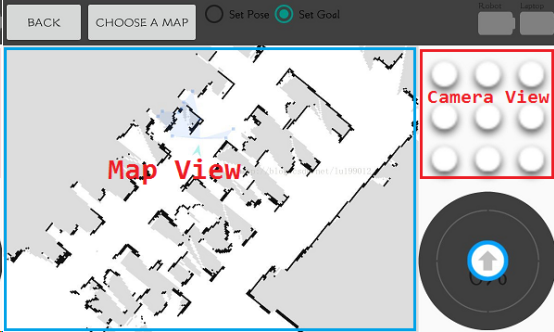
- Set Pose在地圖長按 相當于Rviz中的 2D Pose Estimate
- Set Goal在地圖長按 相當于Rviz中的 2D Nav Goal
- 左下角Joystick可以發出cmd_vel topic控制小車移動
- Camera View與Map View可以相互切換
- miiboo.apk是由android_apps-kinetic和android_core-kinetic改造而來,基于rosjava庫,在原有控制移動、小車位置設定,導航目標設定及路徑顯示等功能基礎上集成了自動獲取IP、啟動保存建圖和代價地圖顯示選擇功能。
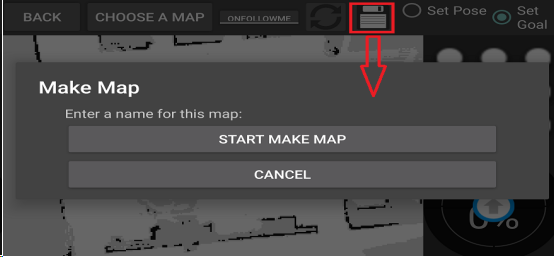
miiboo.apk運用介紹:
主界面:
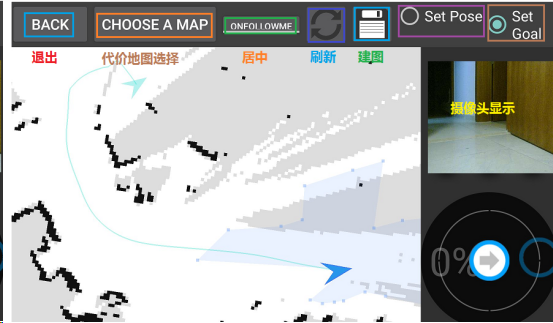
進入建圖模式
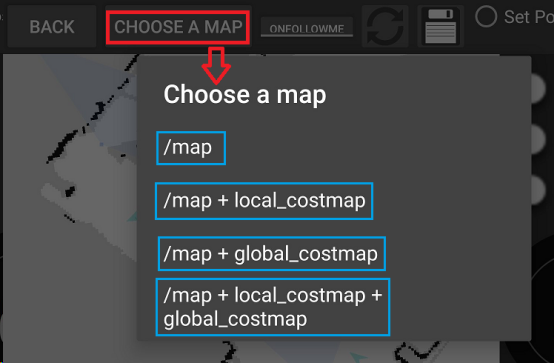
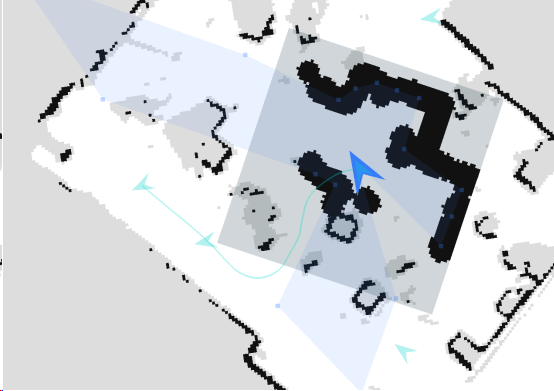
圖層顯示選擇
后記
參考文獻
[1] 張虎,機器人SLAM導航核心技術與實戰[M]. 機械工業出版社,2022.
購書鏈接:https://item.jd.com/13041503.html
下載更多資料:www.xiihoo.com
GitHub源碼:https://github.com/xiihoo/Books_Robot_SLAM_Navigation
Gitee源碼(國內訪問速度快):https://gitee.com/xiihoo-robot/Books_Robot_SLAM_Navigation
知乎教程:https://www.zhihu.com/people/hiram_zhang
視頻教程:https://space.bilibili.com/66815220
郵箱:robot4xiihoo@163.com
QQ群:117698356
本作品為”cnblogs@小虎哥哥愛學習"的原創文章,禁止任何形式的轉載及抄錄,侵權違法行為必究到底

 浙公網安備 33010602011771號
浙公網安備 33010602011771號