
全網最適合入門的面向對象編程教程:04 類和對象的 Python 實現-為自定義類添加方法(PySerial 庫接收串口數據)
 本文我們主要講解了如何為自定義類添加方法,pyseria 庫的基本使用(串口數據收發、serial.Serial 類的屬性和方法),VSPDPro 虛擬串口軟件使用方法等,并使用自定義的串口類和 PC 主機進行串口數據收發。
本文我們主要講解了如何為自定義類添加方法,pyseria 庫的基本使用(串口數據收發、serial.Serial 類的屬性和方法),VSPDPro 虛擬串口軟件使用方法等,并使用自定義的串口類和 PC 主機進行串口數據收發。
全網最適合入門的面向對象編程教程:04 類和對象的 Python 實現-為自定義類添加方法(PySerial 庫接收串口數據)
摘要:
本文我們主要講解了如何為自定義類添加方法,pyseria 庫的基本使用(串口數據收發、serial.Serial 類的屬性和方法),VSPDPro 虛擬串口軟件使用方法等,并使用自定義的串口類和 PC 主機進行串口數據收發。
往期推薦:
全網最適合入門的面向對象編程教程:00 面向對象設計方法導論
全網最適合入門的面向對象編程教程:01 面向對象編程的基本概念
全網最適合入門的面向對象編程教程:02 類和對象的 Python 實現-使用 Python 創建類
全網最適合入門的面向對象編程教程:03 類和對象的 Python 實現-為自定義類添加屬性
更多精彩內容可看:
給你的 Python 加加速:一文速通 Python 并行計算
一個MicroPython的開源項目集錦:awesome-micropython,包含各個方面的Micropython工具庫
文檔和代碼獲取
可訪問如下鏈接進行對文檔下載:
https://github.com/leezisheng/Doc
本文檔主要介紹如何使用 Python 進行面向對象編程,需要讀者對 Python 語法和單片機開發具有基本了解。相比其他講解 Python 面向對象編程的博客或書籍而言,本文檔更加詳細、側重于嵌入式上位機應用,以上位機和下位機的常見串口數據收發、數據處理、動態圖繪制等為應用實例,同時使用 Sourcetrail 代碼軟件對代碼進行可視化閱讀便于讀者理解。
相關示例代碼獲取鏈接如下:https://github.com/leezisheng/Python-OOP-Demo
正文
可以看到上一小節,我們為 SerialClass 類添加了串口設備名、波特率、數據位等串口相關的屬性,但是注意到面向對象編程的重點在于不同對象之間的交互。我們感興趣的是,觸發某些行為可以使屬性發生變化或與外界產生交互。在類中定義函數就相當于定義類的方法,回想一下我們在單片機上使用串口時往往進行打開串口、發送數據、接收數據和關閉串口等操作,在 PC 端串口操作與單片機上類似。這里我們先為類添加方法,具體實現先省略,代碼如下:
class SerialClass:
_# 注意:特殊方法“__init__”前后分別有兩個下劃線!!!_
def __init__(self,port,baudrate,bytesize,parity,stopbits):
self.devport = port
self.devbaudrate = baudrate
self.devbytesize = bytesize
self.devparity = parity
self.devstopbits = stopbits
_# 打開串口_
def OpenSerial(self):
_# __TODO:__打開串口方法待完成_
pass
_# 關閉串口_
def CloseSerial(self):
_# __TODO:__打開串口方法待完成_
pass
_# 串口讀取_
def ReadSerial(self):
_# __TODO:__串口讀取方法待完成_
pass
_# 串口寫入_
def WriteSerial(self):
_# __TODO:__串口寫入方法待完成_
pass
這時,我們可以利用 dir(obj)方法獲得類的對象實例的所有屬性和方法名,dir(obj)返回一個 list。我們使用 for 循環打印,代碼如下:
_# serdev是SerialClass類的一個實例化對象_
for item in dir(serdev):
print(item)
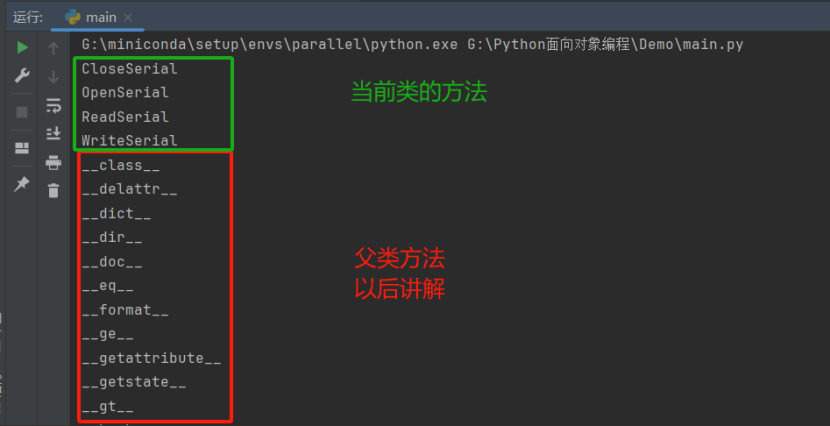
可以看到,我們已經給串口類添加了具體方法,這里,你可能會問,那這些方法具體該怎么實現呢?難道說要我們調操作系統的驅動函數讀取串口、造輪子對數據解析?當然不可能,Python 強大的第三方庫什么都有,這不,它來了:
pyserial,一個實用的串口通信 python 庫
pySerial 是 Python 中用于操作串口的第三方模塊,它支持 Windows、Linux、OSX、BSD 等多個平臺。如果要使用 pySerial 模塊,首先必須保證 Python 版本高于 Python 2.7 或者 Python 3.4。另外,如果你是用的是 Windows 系統,那必須使用 Win7 及以上的版本。
pySerial 的安裝很簡單,只需要執行一條命令:pip install pyserial。安裝完成后,只需要在 Python 代碼中使用** import serial **語句導入該模塊即可。
pySerial 中主要的類就是 class serial.Serial,官方文檔說明如下:
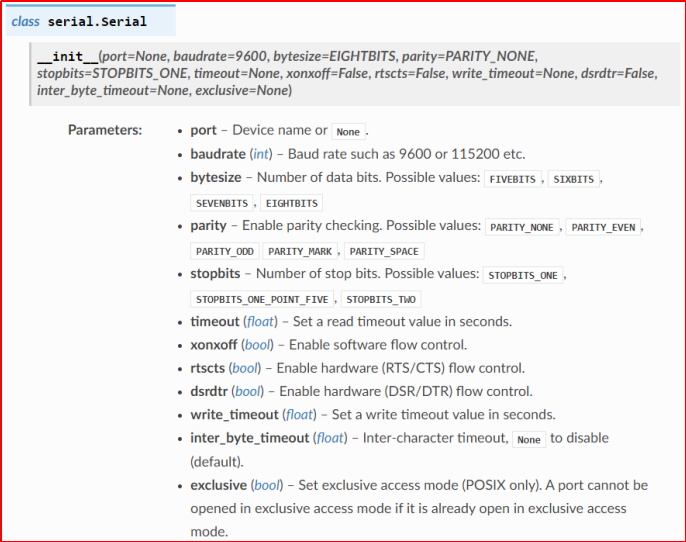
常用參數含義如下:
| 參數名稱 | 含義 |
|---|---|
| port | 定義設備名稱 |
| baudrate | 波特率:波特率是指串口通信中每秒鐘傳輸的符號數,單位是波特(baud)。它決定了數據傳輸的速度和效率。在串口通信中,收發雙方必須使用相同的波特率才能正常通信。典型值為:9600, 19200, 38400, 57600, 115200。 |
| bytesize | 數據位:數據位是指在每個數據包中傳輸的實際數據位數。它表示每個數據包中攜帶的有效信息量。常見的數據位長度有 5 位、7 位和 8 位。典型值為: FIVEBITS, SIXBITS, SEVENBITS, EIGHTBITS。 |
| parity | 設置校驗位,奇偶校驗是一種錯誤檢測方式,用于檢查數據傳輸過程中是否出現錯誤,可選擇偶校驗或奇校驗。典型值為:PARITY_NONE, PARITY_EVEN, PARITY_ODD PARITY_MARK, PARITY_SPACE。 |
| stopbits | 停止位是指在數據包的末尾添加的一個額外的位,用于標識一個數據包的結束。停止位的長度可以是 1 位、1.5 位或 2 位。典型值為: STOPBITS_ONE, STOPBITS_ONE_POINT_FIVE, STOPBITS_TWO。 |
| timeout | 設置讀取超時值(以秒為單位):可選參數為-0、None、x。 |
| write_timeout | 設置寫入超時值(以秒為單位):可選參數為-0、None、x。timeout = None:永遠等待/直到收到請求的字節數。timeout = 0:非阻塞模式,任何情況下立即返回,返回零個或多個,最多可達請求的字節數。 |
serial.Serial 類常用方法如下:
| 方法名稱 | 作用 |
|---|---|
| serial.open() | 打開串口 |
| serial.close() | 關閉串口 |
| serial.isOpen() | 判斷串口是否打開 |
| serial.write(data) | 寫串口數據 data |
| serial.read(size) | 讀串口 size 個數據 |
| serial.flushInput() | 清除輸入緩沖區數據 |
| serial.flushOutput() | 中止當前輸出并清除輸出緩沖區數據 |
| serial.inWaiting() | 判斷當前接收的數據 |
| serial.readline() | 讀一行數據,以/n 結束,要是沒有/n 就一直讀,阻塞 |
接下來看我們的示例代碼:
class SerialClass:
def __init__(self,devport,devbaudrate,devbytesize,devparity,devstopbits):
_# 直接傳入serial.Serial()類_
self.dev = serial.Serial()
self.dev.port = devport
self.dev.baudrate = devbaudrate
self.dev.bytesize = devbytesize
self.dev.parity = devparity
self.dev.stopbits = devstopbits
def OpenSerial(self):
self.dev.open()
def CloseSerial(self):
self.dev.close()
def ReadSerial(self):
_# 非阻塞方式按行讀取_
data = self.dev.readline()
_# 收到為二進制數據,用utf-8編碼將二進制數據解碼為unicode字符串_
_# 字符串轉為int類型_
data = int(data.decode('utf-8', 'replace'))
return data
def WriteSerial(self,write_data):
_# 非阻塞方式寫入_
self.dev.write(write_data.encode())
_# write的輸入參數必須是bytes 格式,_
_# 字符串數據需要encode()函數將其編碼為二進制數據_
_# \r\n表示換行回車_
self.dev.write('\r\n'.encode())
這里可以看到,為方便講解,我們直接調用 pyserial 庫中函數完成串口的打開關閉和讀寫等功能:
- 在初始化函數中,我們定義 self.dev 屬性為串口設備,用其接收串口對象,相當于 self.dev 就是 serial.Serial 類的實例對象,其后用其他入參給 self.dev 設置串口通信參數,完成串口設備對象的創建;
- 在打開串口和關閉串口函數中,我們使用 self.dev.open()、self.dev.close()語句,相當于直接調用 serial.open()和 serial.close()方法;
- 重點就在收發函數中,需要特別注意的有兩點:
① 串口接收到的是二進制數據,如果接收到的 data 全是英文,就需要用 utf-8 編碼將二進制數據解碼為 unicode 字符串。如果 data 里包含中文,則最好以 gb18030 編碼將二進制數據解碼為 unicode 字符串。同時,有時候由于帶中文,或者由于串口的傳輸線纜出現接觸不良等原因,會產生錯誤或者亂碼,如果直接解碼,就會報錯,為了能夠順暢的解碼串口打印,避免這種情況發送,decode 的參數里加上“replace”即可。它實現的作用是,如果解碼的過程中遇到錯誤,會自動以問號?代替解碼失敗的字符。
② 在串口發送中,pyserial 的文檔注明了,write 的輸入參數必須是 bytes 格式的(也就是二進制數據),python3 里對字符串和二進制數據流有明確的區分,文本總是 unicode 編碼儲存的,由 str 類型表示。二進制數據則由 bytes 類型表示,所以字符串數據需要 encode()函數將其編碼為二進制數據,然后才可以順利發送。
串口類的方法已然寫好,接下來如果進行測試呢?我們需要買一個單片機和 usb 轉 ttl 模塊連接電腦,進行串口類的方法測試?(當然不是,開個玩笑)
在寫與單片機通信的上位機軟件時,如果使用單片機的串口來實際調試,那么我們至少還需要一個 USB 轉串口,這樣才能讓單片機和電腦串口通訊,接著我們還需要在單片機上運行程序和串口相關的程序,以便我們知道數據傳輸的狀態,這無疑加大的開發的難度。這里,我們使用虛擬串口軟件即可,虛擬串口軟件是一種模擬物理串行接口的軟件,它完全復制了硬件 COM 接口的功能,并且將被操作系統和串行應用程序識別為真實端口。現實生活中,虛擬串口用處很多。比如:你的應用程序檢測串行輸入數據的時候,方便調試。還比如:多個有應用程序之間使用串口通信。
這里我們使用 VSPDProv6.9 軟件,創建虛擬串口,軟件下載安裝教程點擊鏈接:https://www.xue51.com/soft/9349.html
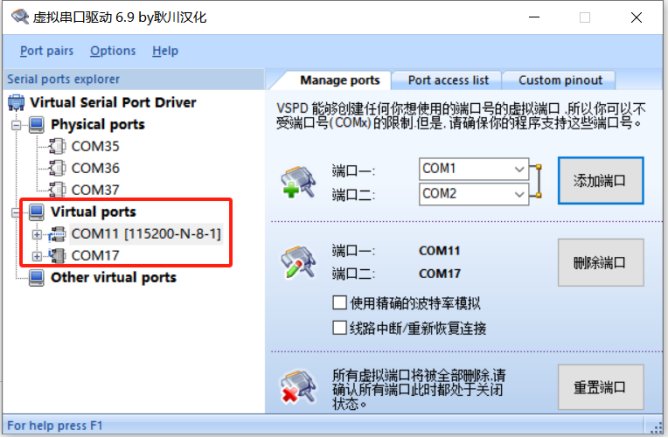
這里我們創建兩個相互連接的串口 com11 和 com17,虛擬的串口需要成對創建,來指明他們的連接關系,就好比各種連接線的公投和母頭一樣。我們建立好虛擬串口連接以后,就可以使用它們來通訊了,我們可以選擇任意一個串口助手軟件來與我們寫的 python 串口類進行通信。這里,我們選擇 xcom 軟件進行測試,xcom 軟件的安裝下載教程可以點擊鏈接: https://blog.csdn.net/qq_41573860/article/details/103796913
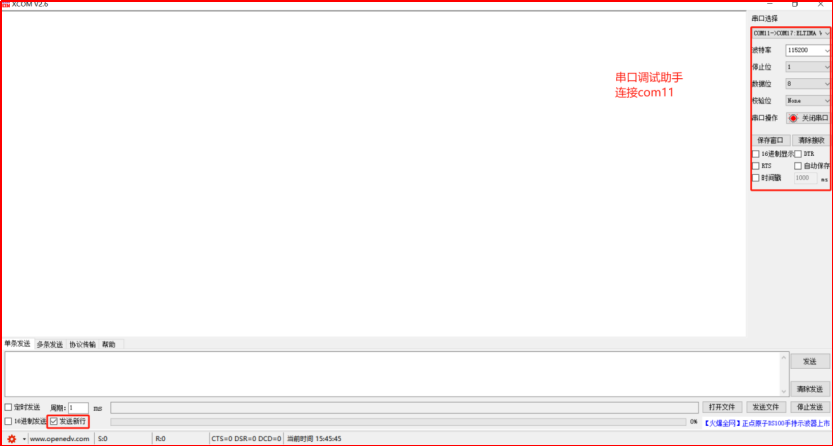
打開 xcom 軟件,我們先進行相關串口參數的配置,具體如下圖所示:
此時,我們在 Python 程序中,創建串口設備實例,連接 com17,代碼如下:
_# 生成串口類的實例_
serdev = SerialClass(devport = "COM17",
devbaudrate = 115200,
devbytesize = serial.EIGHTBITS, _# 數據位長度為8位_
devparity = serial.PARITY_NONE, _# 無奇偶校驗_
devstopbits = serial.STOPBITS_ONE _# 1位停止位_
)
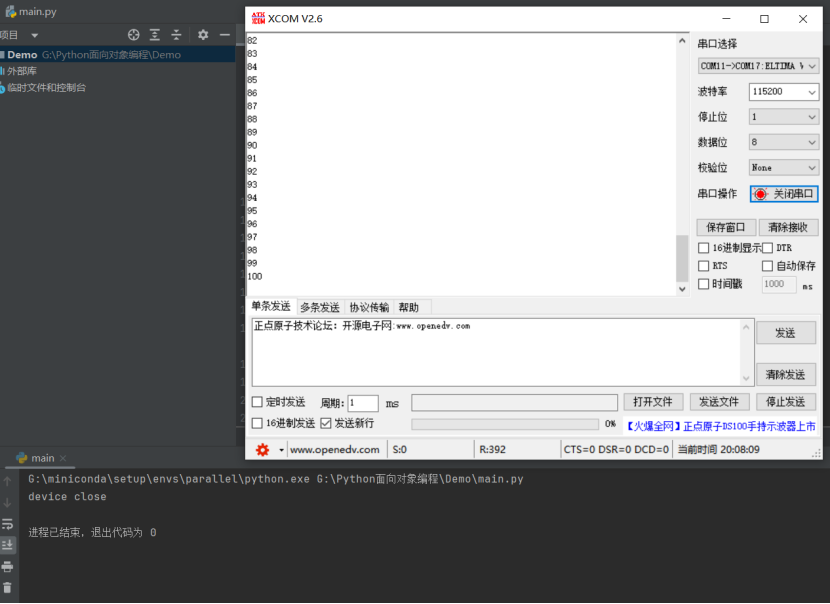
我們首先嘗試使用 Python 完成串口發送功能,這里我們定義了一個 count 計數變量,初始值為 0,每次發送完成后遞增,循環 100 次后關閉串口,代碼如下:
serdev.OpenSerial()
count = 0
while True:
# 必須使用全局變量,不然每次循環都是一個新的count
# 關于原因可以自行查看變量的生存期和作用域相關知識點
count = count + 1
serdev.WriteSerial(str(count))
if(count == 100):
break
serdev.CloseSerial()
print("device close")
運行結果如下:
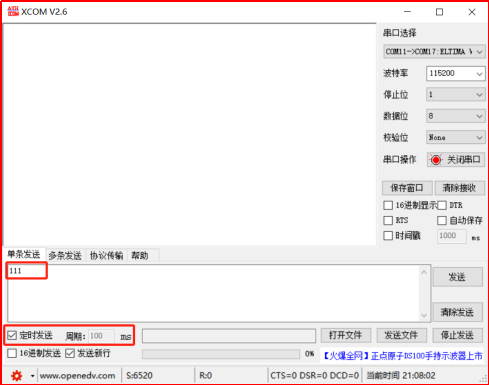
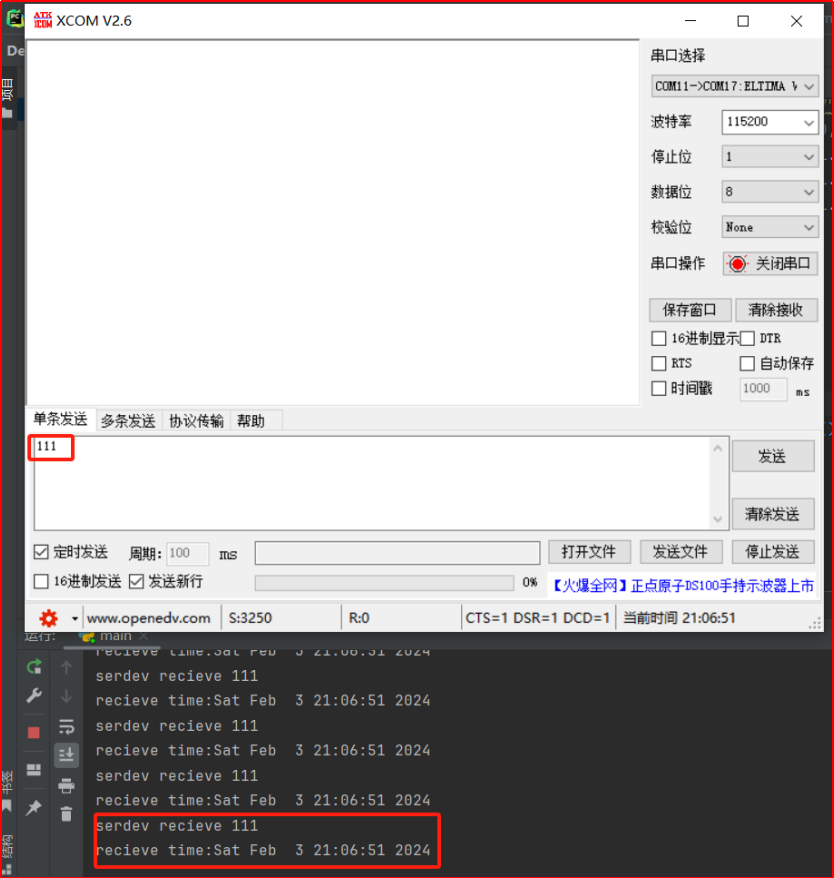
接下來,我們嘗試使用 Python 完成串口接收功能,我們在 xcom 中定時發送,在 Python 中輪詢接收并打印接收的數據,這里我們導入 time 庫,打印接收時間。time 庫是 Python 中處理時間的標準庫,是最基礎的時間處理庫。time 庫主要用于計時和獲取系統時間,time.ctime()函數用于獲取當前世界統一時間,形式為“星期-月份-當月號-時-分-秒-年份”。
示例代碼和配置如下:
import time
while True:
data = serdev.ReadSerial()
print("serdev recieve %d"%data)
print("recieve time:"+str(time.ctime()))
運行結果如下:


 浙公網安備 33010602011771號
浙公網安備 33010602011771號