
摘要:  為了幫助初學(xué)者更好地理解和應(yīng)用面向?qū)ο蟮脑O(shè)計(jì)方法,本文檔更加深入地探討其背后的原理和特點(diǎn),并結(jié)合實(shí)際案例來(lái)展示其在實(shí)際開(kāi)發(fā)中的應(yīng)用價(jià)值。本文檔主要介紹如何使用 Python 進(jìn)行面向?qū)ο缶幊蹋枰x者對(duì) Python 語(yǔ)法和單片機(jī)開(kāi)發(fā)具有基本了解。相比其他講解 Python 面向?qū)ο缶幊痰牟┛突驎?shū)籍而言,本文檔更加詳細(xì)、側(cè)重于嵌入式上位機(jī)應(yīng)用,以上位機(jī)和下位機(jī)的常見(jiàn)串口數(shù)據(jù)收發(fā)、數(shù)據(jù)處理、動(dòng)態(tài)圖繪制等為應(yīng)用實(shí)例,同時(shí)使用 Sourcetrail 代碼軟件對(duì)代碼進(jìn)行可視化閱讀便于讀者理解。 閱讀全文
為了幫助初學(xué)者更好地理解和應(yīng)用面向?qū)ο蟮脑O(shè)計(jì)方法,本文檔更加深入地探討其背后的原理和特點(diǎn),并結(jié)合實(shí)際案例來(lái)展示其在實(shí)際開(kāi)發(fā)中的應(yīng)用價(jià)值。本文檔主要介紹如何使用 Python 進(jìn)行面向?qū)ο缶幊蹋枰x者對(duì) Python 語(yǔ)法和單片機(jī)開(kāi)發(fā)具有基本了解。相比其他講解 Python 面向?qū)ο缶幊痰牟┛突驎?shū)籍而言,本文檔更加詳細(xì)、側(cè)重于嵌入式上位機(jī)應(yīng)用,以上位機(jī)和下位機(jī)的常見(jiàn)串口數(shù)據(jù)收發(fā)、數(shù)據(jù)處理、動(dòng)態(tài)圖繪制等為應(yīng)用實(shí)例,同時(shí)使用 Sourcetrail 代碼軟件對(duì)代碼進(jìn)行可視化閱讀便于讀者理解。 閱讀全文
為了幫助初學(xué)者更好地理解和應(yīng)用面向?qū)ο蟮脑O(shè)計(jì)方法,本文檔更加深入地探討其背后的原理和特點(diǎn),并結(jié)合實(shí)際案例來(lái)展示其在實(shí)際開(kāi)發(fā)中的應(yīng)用價(jià)值。本文檔主要介紹如何使用 Python 進(jìn)行面向?qū)ο缶幊蹋枰x者對(duì) Python 語(yǔ)法和單片機(jī)開(kāi)發(fā)具有基本了解。相比其他講解 Python 面向?qū)ο缶幊痰牟┛突驎?shū)籍而言,本文檔更加詳細(xì)、側(cè)重于嵌入式上位機(jī)應(yīng)用,以上位機(jī)和下位機(jī)的常見(jiàn)串口數(shù)據(jù)收發(fā)、數(shù)據(jù)處理、動(dòng)態(tài)圖繪制等為應(yīng)用實(shí)例,同時(shí)使用 Sourcetrail 代碼軟件對(duì)代碼進(jìn)行可視化閱讀便于讀者理解。 閱讀全文
posted @ 2024-06-23 01:06
FreakStudio
閱讀(928)
評(píng)論(0)
推薦(0)
 本文以MicroPython紅外傳感器驅(qū)動(dòng)為例,3步搞定代碼閱讀,快速上手新模塊開(kāi)發(fā)。對(duì)于新手而言,首次閱讀陌生代碼比較困難,看不懂寫(xiě)的是什么、如何進(jìn)行測(cè)試?都是常見(jiàn)的問(wèn)題。
接下來(lái),我們以 MicroPython 版本的紅外收發(fā)模塊驅(qū)動(dòng)代碼為例,講解如何使用 AI 工具輔助快速閱讀并理解陌生代碼,以便未來(lái)能獨(dú)立處理其他模塊的代碼。
本文以MicroPython紅外傳感器驅(qū)動(dòng)為例,3步搞定代碼閱讀,快速上手新模塊開(kāi)發(fā)。對(duì)于新手而言,首次閱讀陌生代碼比較困難,看不懂寫(xiě)的是什么、如何進(jìn)行測(cè)試?都是常見(jiàn)的問(wèn)題。
接下來(lái),我們以 MicroPython 版本的紅外收發(fā)模塊驅(qū)動(dòng)代碼為例,講解如何使用 AI 工具輔助快速閱讀并理解陌生代碼,以便未來(lái)能獨(dú)立處理其他模塊的代碼。  講解了Python Asyncio庫(kù)的協(xié)程管理與任務(wù)控制,涵蓋協(xié)程的創(chuàng)建與調(diào)度、任務(wù)的生命周期管理,以及Asyncio與Futures結(jié)合實(shí)現(xiàn)異步編程的進(jìn)階應(yīng)用,助力開(kāi)發(fā)者高效掌握異步編程核心技術(shù)。
講解了Python Asyncio庫(kù)的協(xié)程管理與任務(wù)控制,涵蓋協(xié)程的創(chuàng)建與調(diào)度、任務(wù)的生命周期管理,以及Asyncio與Futures結(jié)合實(shí)現(xiàn)異步編程的進(jìn)階應(yīng)用,助力開(kāi)發(fā)者高效掌握異步編程核心技術(shù)。  Python異步編程基于 async/await 構(gòu)建協(xié)程,運(yùn)行在事件循環(huán)中。協(xié)程生成 Task,遇到?await?時(shí)掛起,I/O 完成觸發(fā)回調(diào)恢復(fù)運(yùn)行,通過(guò)事件循環(huán)非阻塞調(diào)度并發(fā)任務(wù),實(shí)現(xiàn)單線程高并發(fā)。
Python異步編程基于 async/await 構(gòu)建協(xié)程,運(yùn)行在事件循環(huán)中。協(xié)程生成 Task,遇到?await?時(shí)掛起,I/O 完成觸發(fā)回調(diào)恢復(fù)運(yùn)行,通過(guò)事件循環(huán)非阻塞調(diào)度并發(fā)任務(wù),實(shí)現(xiàn)單線程高并發(fā)。  在Python多進(jìn)程編程中,Pool類用于創(chuàng)建進(jìn)程池,可并行執(zhí)行多個(gè)任務(wù)。通過(guò)map、apply等方法,將函數(shù)和參數(shù)分發(fā)到子進(jìn)程,提高CPU利用率,簡(jiǎn)化進(jìn)程管理,便于資源復(fù)用。適用于CPU密集型場(chǎng)景。
在Python多進(jìn)程編程中,Pool類用于創(chuàng)建進(jìn)程池,可并行執(zhí)行多個(gè)任務(wù)。通過(guò)map、apply等方法,將函數(shù)和參數(shù)分發(fā)到子進(jìn)程,提高CPU利用率,簡(jiǎn)化進(jìn)程管理,便于資源復(fù)用。適用于CPU密集型場(chǎng)景。  Python多進(jìn)程中,Queue和Pipe提供進(jìn)程間安全通信。Queue依賴鎖和緩沖區(qū),保障數(shù)據(jù)原子性和有序性;Pipe實(shí)現(xiàn)點(diǎn)對(duì)點(diǎn)單/雙向數(shù)據(jù)流。二者內(nèi)置序列化,簡(jiǎn)化交換流程,確保一致性與安全性高效。
Python多進(jìn)程中,Queue和Pipe提供進(jìn)程間安全通信。Queue依賴鎖和緩沖區(qū),保障數(shù)據(jù)原子性和有序性;Pipe實(shí)現(xiàn)點(diǎn)對(duì)點(diǎn)單/雙向數(shù)據(jù)流。二者內(nèi)置序列化,簡(jiǎn)化交換流程,確保一致性與安全性高效。  面向老板編程(Programming Oriented to Boss,POB)。面向領(lǐng)導(dǎo)編程不是消極對(duì)抗,而是在技術(shù)理性與管理藝術(shù)間尋找動(dòng)態(tài)平衡的生存智慧。
正如Lunix之父Lunus Torvalds所說(shuō):"Talk is cheap. Show me the PPT." 在這個(gè)需求變幻莫測(cè)的時(shí)代,掌握BOP范式將成為程序員繼算法、架構(gòu)之后的第三大核心競(jìng)爭(zhēng)力。
面向老板編程(Programming Oriented to Boss,POB)。面向領(lǐng)導(dǎo)編程不是消極對(duì)抗,而是在技術(shù)理性與管理藝術(shù)間尋找動(dòng)態(tài)平衡的生存智慧。
正如Lunix之父Lunus Torvalds所說(shuō):"Talk is cheap. Show me the PPT." 在這個(gè)需求變幻莫測(cè)的時(shí)代,掌握BOP范式將成為程序員繼算法、架構(gòu)之后的第三大核心競(jìng)爭(zhēng)力。  SY3501是一款專為移動(dòng)電源設(shè)計(jì)的單芯片解決方案IC,高度集成了充電管理模塊、LED電量顯示模塊、同步升壓放電管理模塊的移動(dòng)電源管理芯片,極大的簡(jiǎn)化了外圍電路與元器件數(shù)量。
SY3501是一款專為移動(dòng)電源設(shè)計(jì)的單芯片解決方案IC,高度集成了充電管理模塊、LED電量顯示模塊、同步升壓放電管理模塊的移動(dòng)電源管理芯片,極大的簡(jiǎn)化了外圍電路與元器件數(shù)量。  在智能控制系統(tǒng)中,我們經(jīng)常會(huì)遇到這樣的問(wèn)題:如何用一個(gè)微弱的控制信號(hào),驅(qū)動(dòng)一臺(tái)高功率設(shè)備?最常見(jiàn)的解決方案有三種:大功率 MOSFET、電磁繼電器、以及磁保持繼電器。那么,這三種方案到底有什么不同?各自適合用在哪些場(chǎng)合?有沒(méi)有什么容易踩的坑?本期視頻,我們一起來(lái)詳細(xì)分析。
在智能控制系統(tǒng)中,我們經(jīng)常會(huì)遇到這樣的問(wèn)題:如何用一個(gè)微弱的控制信號(hào),驅(qū)動(dòng)一臺(tái)高功率設(shè)備?最常見(jiàn)的解決方案有三種:大功率 MOSFET、電磁繼電器、以及磁保持繼電器。那么,這三種方案到底有什么不同?各自適合用在哪些場(chǎng)合?有沒(méi)有什么容易踩的坑?本期視頻,我們一起來(lái)詳細(xì)分析。 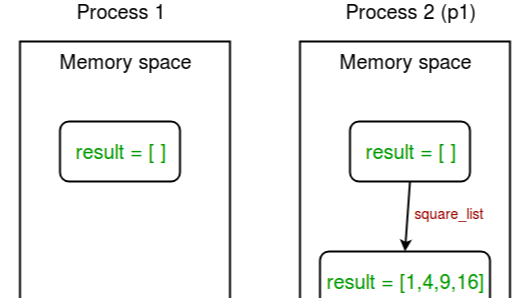 Python多進(jìn)程通信中,共享內(nèi)存通過(guò)Value和Array實(shí)現(xiàn)高效數(shù)據(jù)共享,直接操作物理內(nèi)存避免拷貝,需同步鎖保證安全,支持?jǐn)?shù)值、數(shù)組及自定義結(jié)構(gòu)體(借助ctypes模塊)。Manager則通過(guò)服務(wù)進(jìn)程管理共享對(duì)象(如dict、list),支持更多數(shù)據(jù)類型但性能較低。共享內(nèi)存適合高頻小數(shù)據(jù),Manager適用于復(fù)雜數(shù)據(jù)結(jié)構(gòu),兩者均需進(jìn)程同步機(jī)制確保數(shù)據(jù)一致性,兼顧效率與靈活性。
Python多進(jìn)程通信中,共享內(nèi)存通過(guò)Value和Array實(shí)現(xiàn)高效數(shù)據(jù)共享,直接操作物理內(nèi)存避免拷貝,需同步鎖保證安全,支持?jǐn)?shù)值、數(shù)組及自定義結(jié)構(gòu)體(借助ctypes模塊)。Manager則通過(guò)服務(wù)進(jìn)程管理共享對(duì)象(如dict、list),支持更多數(shù)據(jù)類型但性能較低。共享內(nèi)存適合高頻小數(shù)據(jù),Manager適用于復(fù)雜數(shù)據(jù)結(jié)構(gòu),兩者均需進(jìn)程同步機(jī)制確保數(shù)據(jù)一致性,兼顧效率與靈活性。  浙公網(wǎng)安備 33010602011771號(hào)
浙公網(wǎng)安備 33010602011771號(hào)