PLC中的運動控制 - (二)基本控制指令MC_Power,MC_Stop,MC_Halt
啟動指令 MC_Power
MC_Power 功能塊是運動控制中用于管理軸使能狀態的核心指令,其本質是控制PLC與驅動器之間的“權力交接”。
MC_Power 的核心作用與接口
MC_Power 的基本功能是接通或斷開驅動器的電源(或控制權),它是所有運動控制的前提。其核心輸入輸出接口如下:

相關變量
輸入輸出變量
輸入輸出變量 名稱 數據類型 有效范圍 初始值 描述 Axis 軸 AXIS_REF - - 映射到軸,即AXIS_REF的一個實例
輸入變量
輸入變量 名稱 數據類型 有效范圍 初始值 描述 Enable 執行條件 BOOL TRUE,FALSE FALSE 設置為 TRUE 則軸使能 EnablePositive BOOL BOOL TRUE,FALSE TRUE 設置為True則軸允許正向運動 EnableNegative BOOL BOOL TRUE,FALSE TRUE 設置為True則軸允許反向運動
輸出變量
輸出變量 名稱 數據類型 有效范圍 初始值 描述 Status 可運行狀態 REAL TRUE,FALSE FALSE 如果軸已經準備好運動,置為TRUE Valid 有效 BOOL TRUE,FALSE FALSE 是否合法,合法為True Error 錯誤 BOOL TRUE,FALSE FALSE 異常發生時,置為TRUE ErrorID 錯誤代碼 ENUM 0 異常發生時,輸出錯誤代碼
各類軸的使能過程
狀態機: 當使能完成后,只要軸處于非使能狀態,都會將狀態置為Standstill
對于不同類型的軸,其底層對不同類型的軸進行的操作有所不同。
1. 脈沖軸 (Pulse Axis)
MC_Power對脈沖軸的使能過程相對直接,主要在PLC本地完成。
-
使能過程:
- 檢查狀態:首先檢查驅動器狀態及錯誤。
- 激活脈沖通道:若
Enable為TRUE且無故障,PLC激活指定的脈沖輸出通道(PTO)。 - 提供使能信號:PLC會控制一個本地數字量輸出點(DO點)輸出高電平。這個信號通常直接連接到驅動器的“伺服使能”(Servo-On)或“使能”(Enable)端口,從而接通驅動器的電源,電機勵磁并保持力矩。
- 狀態監控:若使能成功,
Status輸出為TRUE。
-
失能過程:
- 當
Enable設置為FALSE時,PLC會根據組態的StopMode(停止模式)停止脈沖輸出,并關閉控制驅動器使能的DO點,驅動器斷電。
- 當
2. 編碼器軸 (Encoder Axis)
編碼器軸在脈沖軸的基礎上增加了位置反饋閉環。
-
使能過程:
- 執行脈沖軸使能步驟:包含激活脈沖輸出和提供驅動器使能信號。
- 啟用高速計數器(HSC):同時,PLC會啟用并配置與編碼器相連的高速計數器。HSC開始實時采集編碼器的A、B相脈沖,并將其轉換為內部的位置值(如
%IDC或ActualPosition)。 - 形成閉環:此時,系統構成了一個“半閉環”或“全閉環”(取決于編碼器安裝位置),PLC可以比較指令位置和實際位置。
-
關鍵點:
MC_Power的Status信號不僅表示驅動器已使能,也意味著編碼器反饋回路已準備就緒。
3. 總線軸 (Bus Axis)
對于總線軸,MC_Power 的使能過程本質是通過總線網絡發送符合 CiA 402 協議的特定指令序列來遙控驅動器。
-
通用使能流程(基于CiA 402狀態機):
- 檢查通信:確保PLC與驅動器之間的循環通信已建立且無錯誤。
- 設置操作模式:通過SDO寫入到對象字典的
0x6060: Modes of operation,設置驅動器的目標模式(如PP、PV等)。 - 發送使能序列:通過PDO周期性寫入控制字(
0x6040: Control Word) 的特定位序列來啟動驅動器。一個典型的“上使能”序列是:- 位0 (Switch On): 1 → 0 → 1 (有時需要“下降沿”觸發)
- 位1 (Enable Voltage): 1
- 位2 (Quick Stop): 1 (允許正常停止)
- 位3 (Enable Operation): 1
- 狀態確認:通過PDO周期性讀取狀態字(
0x6041: Status Word),確認驅動器是否成功進入“操作使能”狀態(通常狀態字值為0x2337或類似,表示“Switched on”和“Operation enabled”)。 - 反饋至MC_Power:當狀態字顯示“Operation enabled”后,
MC_Power的Status輸出變為TRUE。
-
EtherCAT 特定細節:
- 上述SDO和PDO通信通過 EtherCAT 郵箱和過程數據 完成。
- 配置和映射通常在使用 ESI 文件組態時已完成,程序中的
MC_Power調用觸發此預配置流程。
-
CANopen 特定細節:
- 過程與EtherCAT高度一致,因其共享相同的CiA 402協議棧。
- SDO用于參數配置,PDO用于循環傳輸控制字和狀態字。
-
失能過程:
- 通過控制字發送禁用序列(如將位2-Quick Stop置0觸發急停),或直接切斷通信。
使能過程中的注意事項
- 使能順序:許多 PLC 的啟動速度快于驅動器。若 PLC 啟動后立即執行
MC_Power,而驅動器尚未準備就緒,可能導致使能失敗(例如報錯 16#8001)。最佳實踐是等待驅動器和編碼器的“通信就緒”信號有效后,再觸發MC_Power的Enable輸入。 - 錯誤處理:務必監控
MC_Power的Error和ErrorID輸出,以便及時處理使能過程中可能出現的任何問題,如通信超時、驅動器故障等。 - 安全配置:務必在硬件組態中正確配置限位開關和急停信號,確保異常情況下能安全停止軸運動。
MC_Stop
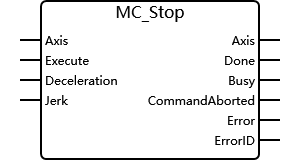
相關變量
輸入輸出變量
輸入輸出變量 名稱 數據類型 有效范圍 初始值 描述 Axis 軸 AXIS_REF - - 映射到軸,即AXIS_REF的一個實例
輸入變量
輸入變量 名稱 數據類型 有效范圍 初始值 描述 Execute 執行條件 BOOL TRUE,FALSE FALSE 輸入的一個上升沿將啟動功能塊的處理 Deceleration 減速度 LREAL 遵照數據類型 0 設置減速度值 Jerk 躍度 LREAL 遵照數據類型 0 設置躍度值
輸出變量
輸出變量 名稱 數據類型 有效范圍 初始值 描述 Done 指令執行完成 BOOL TRUE,FALSE FALSE 軸指令執行完成,置為TRUE Busy 指令正在執行 BOOL TRUE,FALSE FALSE 當前指令正在執行中,置為TRUE CommandAborted 指令被中斷 BOOL TRUE,FALSE FALSE 當前指令被中斷,置為TRUE Error 錯誤 BOOL TRUE,FALSE FALSE 異常發生時,置為TRUE ErrorID 錯誤代碼 ENUM 0 異常發生時,輸出錯誤代碼
1. MC_Stop 指令概要
MC_Stop 是 PLCopen Motion Control(IEC 61131-3 Part 7)標準中的一個動作指令,用于停止軸的運動。
功能要點:
- 將軸從當前運行狀態(MoveAbsolute、MoveRelative、Jog、Velocity模式等)快速停止。
- 停止方式通常是減速到零速度(使用設定的 Deceleration 值)。
- 可以選擇是否進行急停(Abort/Immediate stop)或者受控停(Controlled stop)。
- 執行完成后,軸進入Standstill 或 Disabled 狀態。
2. 狀態機變化過程
MC_Stop 在狀態機中的典型變化:
| 原狀態 | 觸發指令 | 中間狀態 | 最終狀態 |
|---|---|---|---|
| Moving | MC_Stop | Stopping | Standstill |
| Jog中 | MC_Stop | Stopping | Standstill |
| Velocity模式 | MC_Stop | Stopping | Standstill |
| Homing中 | MC_Stop | Stopping | Standstill |
| ErrorStop | MC_Stop | 無變化 | ErrorStop |
具體過程:
- PLC 的 Motion 控制器檢測到 MC_Stop 的
Execute由 FALSE → TRUE 的上升沿。 - 狀態機從 Moving 等活躍狀態切換到 Stopping 狀態。
- 控制器計算停止所需的減速度(通常由軸參數設定或 MC_Stop 的 Deceleration 輸入)。
- 電機驅動開始執行減速控制。
- 速度降到零,位置鎖定(即保持當前位置)。
- 狀態機進入 Standstill(電機仍帶使能),等待下一命令。
- 如果發生驅動故障或硬件報警,則會進入 ErrorStop。
3. 在不同類型軸上的執行動作
3.1 脈沖軸(Pulse Output Axis)
指由 PLC 通過脈沖+方向信號(Pulse/Dir)或正交脈沖輸出控制的伺服/步進電機。
MC_Stop 執行過程:
- PLC 內部 Motion 控制器計算需要的減速曲線。
- 在高速脈沖輸出模塊中調整脈沖頻率下降,按照設定減速度讓電機減速到零。
- 當目標速度為 0 時,輸出脈沖停止(維持方向信號穩定)。
- 驅動器內部保持電機抱閘或伺服鎖定當前位置。
- 編碼器反饋位置用于精確停止點,更新 PLC 內部位置寄存器。
脈沖軸特點:
- 減速過程完全由 PLC 控制脈沖頻率。
- 編碼器反饋可以是獨立接入 PLC,也可能只接到驅動(閉環或半閉環控制)。
3.2 編碼器軸(Encoder Axis)
這里指無主動驅動,只使用外部編碼器作為位置/速度采集的“虛擬”軸或跟蹤軸。
MC_Stop 執行過程:
- PLC 內軸控制對象不會輸出指令給驅動(因為沒有驅動)。
- 將此“軸”的速度目標立即設為零(通常只是內部變量的改變)。
- 若該編碼器軸是通過跟隨另一個主軸運動(例如 MC_GearIn),MC_Stop 會解除跟隨關系。
- 更新位置采樣器、速度采樣器為 0。
- 狀態機轉入 Standstill。
編碼器軸特點:
- 沒有實際減速動作,更多是邏輯上的“停止”。
- 應用在同步檢測、軌跡跟蹤等虛擬軸場景。
3.3 總線軸(Bus Axis: EtherCAT, CANopen)
EtherCAT 軸
EtherCAT 總線下的驅動多使用 CiA 402(CANopen over EtherCAT)標準化控制狀態機。
MC_Stop 執行過程:
- PLC Motion 控制器生成減速運動命令(位置或速度模式)。
- 通過 EtherCAT PDO(Process Data Object)周期性向驅動發送新的目標位置或目標速度。
- 驅動器根據設定的減速度執行受控停。
- 當反饋速度降到 0,并且位置鎖定,驅動保持使能。
- PLC 狀態機進入 Standstill。
特殊點:
- EtherCAT 的停止命令并非直接關閉使能,而是連續調整目標速度/位置。
- 對于 CiA 402 狀態機,MC_Stop 不會觸發 Quick Stop 或 Fault Reset,除非設定為急停。
CANopen 軸
CANopen 同樣遵循 CiA 402 設備控制狀態機,但通信機制是 CAN 報文。
MC_Stop 執行過程:
- PLC 將 MC_Stop 計算的減速目標通過 CANopen PDO 或 SDO 寫入驅動的速度/位置寄存器。
- 驅動器執行減速。
- 停止后,驅動保持當前位置,繼續處于 Operation Enabled 狀態。
- 狀態機從 Moving 到 Standstill。
特殊點:
- CANopen 帶寬較小,更新頻率低于 EtherCAT,因此減速控制更多依賴驅動內部的加減速參數。
- 如果是急停模式,可直接發送 Quick Stop 命令(CiA 402 控制字 bit 2)。
4. 注意事項
- Deceleration 參數:
- MC_Stop 可以指定減速度,如果為 0,則使用軸的默認減速度參數。
- 急停 vs 受控停:
- 急停:立即切斷輸出或直接發 Quick Stop,可能產生機械沖擊。
- 受控停:按照減速度平滑停止。
- 總線延遲:
- EtherCAT 的周期短(通常 1~4 ms),停止響應更快。
- CANopen 因帶寬低,需要驅動端配合內部減速功能。
MC_Halt

相關變量
輸入輸出變量
輸入輸出變量 名稱 數據類型 有效范圍 初始值 描述 Axis 軸 AXIS_REF - - 映射到軸,即AXIS_REF的一個實例
輸入變量
輸入變量 名稱 數據類型 有效范圍 初始值 描述 Execute 執行條件 BOOL TRUE,FALSE FALSE 輸入的一個上升沿將啟動功能塊的處理 Deceleration 減速度 LREAL 遵照數據類型 0 速度變小時減速度值 Jerk 躍度 REAL "正數"+"0" 0 指定躍度[指令單位/s3 BufferMode 緩沖模式 ENUM 0 定義功能塊的時間順序
輸出變量
輸出變量 名稱 數據類型 有效范圍 初始值 描述 Done 指令執行完成 BOOL TRUE,FALSE FALSE 軸指令執行完成,置為TRUE Busy 指令正在執行 BOOL TRUE,FALSE FALSE 當前指令正在執行中,置為TRUE Active 指令正在執行 BOOL TRUE,FALSE FALSE 表示功能塊對軸具有控制權 CommandAborted 指令被中斷 BOOL TRUE,FALSE FALSE 當前指令被中斷,置為TRUE Error 錯誤 BOOL TRUE,FALSE FALSE 異常發生時,置為TRUE ErrorID 錯誤代碼 ENUM 0 異常發生時,輸出錯誤代碼
1. MC_Halt 指令概要
MC_Halt 是 PLCopen Motion Control(IEC 61131-3 Part 7)標準中的一個動作指令,用于立即停止軸的運動。與 MC_Stop 不同,MC_Halt 通常會立即停止軸的運動,而不是通過減速到零速度的方式。
功能要點:
- 立即停止軸的運動。
- 可以選擇是否進行急停(Abort/Immediate stop)或者受控停(Controlled stop),但通常為急停。
- 執行完成后,軸進入 Standstill 或 Disabled 狀態。
2. 狀態機變化過程
MC_Halt 在狀態機中的典型變化:
| 原狀態 | 觸發指令 | 中間狀態 | 最終狀態 |
|---|---|---|---|
| Moving | MC_Halt | DiscreteMotion | Standstill |
| Jog中 | MC_Halt | DiscreteMotion | Standstill |
| Velocity模式 | MC_Halt | DiscreteMotion | Standstill |
| Homing中 | MC_Halt | DiscreteMotion | Standstill |
| ErrorStop | MC_Halt | 無變化 | ErrorStop |
具體過程:
- PLC 的 Motion 控制器檢測到 MC_Halt 的
Execute由 FALSE → TRUE 的上升沿。 - 狀態機從 Moving 等活躍狀態切換到 Stopping 狀態。
- 控制器立即發送停止命令給驅動器。
- 驅動器根據設定的急停方式(如切斷電源或使能信號)立即停止電機。
- 速度降到零,位置鎖定(即保持當前位置)。
- 狀態機進入 Standstill(電機仍帶使能),等待下一命令。
- 如果發生驅動故障或硬件報警,則會進入 ErrorStop。
3. 在不同類型軸上的執行動作
3.1 脈沖軸(Pulse Output Axis)
指由 PLC 通過脈沖+方向信號(Pulse/Dir)或正交脈沖輸出控制的伺服/步進電機。
MC_Halt 執行過程:
- PLC 內部 Motion 控制器立即停止脈沖輸出。
- 驅動器接收到停止命令后,立即切斷電機的電源或使能信號。
- 電機迅速停止,可能產生機械沖擊。
- 編碼器反饋位置用于精確停止點,更新 PLC 內部位置寄存器。
脈沖軸特點:
- 立即停止脈沖輸出,沒有減速過程。
- 編碼器反饋可以是獨立接入 PLC,也可能只接到驅動(閉環或半閉環控制)。
3.2 編碼器軸(Encoder Axis)
這里指無主動驅動,只使用外部編碼器作為位置/速度采集的“虛擬”軸或跟蹤軸。
MC_Halt 執行過程:
- PLC 內軸控制對象不會輸出指令給驅動(因為沒有驅動)。
- 將此“軸”的速度目標立即設為零(通常只是內部變量的改變)。
- 若該編碼器軸是通過跟隨另一個主軸運動(例如 MC_GearIn),MC_Halt 會解除跟隨關系。
- 更新位置采樣器、速度采樣器為 0。
- 狀態機轉入 Standstill。
編碼器軸特點:
- 沒有實際減速動作,更多是邏輯上的“停止”。
- 應用在同步檢測、軌跡跟蹤等虛擬軸場景。
3.3 總線軸(Bus Axis: EtherCAT, CANopen)
EtherCAT 軸
EtherCAT 總線下的驅動多使用 CiA 402(CANopen over EtherCAT)標準化控制狀態機。
MC_Halt 執行過程:
- PLC Motion 控制器生成急停命令。
- 通過 EtherCAT PDO(Process Data Object)周期性向驅動發送急停命令。
- 驅動器根據 CiA 402 標準,立即執行急停操作,切斷電機電源或使能信號。
- 當反饋速度降到 0,并且位置鎖定,驅動保持使能。
- PLC 狀態機進入 Standstill。
特殊點:
- EtherCAT 的急停命令通常是通過設置 CiA 402 控制字的 Quick Stop 位(bit 2)來實現。
- 對于 CiA 402 狀態機,MC_Halt 會觸發 Quick Stop 或 Fault Reset。
CANopen 軸
CANopen 同樣遵循 CiA 402 設備控制狀態機,但通信機制是 CAN 報文。
MC_Halt 執行過程:
- PLC 將 MC_Halt 計算的急停命令通過 CANopen PDO 或 SDO 寫入驅動的速度/位置寄存器。
- 驅動器接收到急停命令后,立即切斷電機的電源或使能信號。
- 電機迅速停止,可能產生機械沖擊。
- 停止后,驅動保持當前位置,繼續處于 Operation Enabled 狀態。
- 狀態機從 Moving 到 Standstill。
特殊點:
- CANopen 的急停命令同樣是通過設置 CiA 402 控制字的 Quick Stop 位(bit 2)來實現。
- CANopen 帶寬較小,更新頻率低于 EtherCAT,因此急停響應時間可能稍長。
4. 注意事項
- 急停 vs 受控停:
- 急停:立即切斷輸出或直接發 Quick Stop,可能產生機械沖擊。
- 受控停:按照減速度平滑停止。
- 總線延遲:
- EtherCAT 的周期短(通常 1~4 ms),停止響應更快。
- CANopen 因帶寬低,需要驅動端配合內部急停功能。
- 狀態機同步:
- 在多軸聯動中執行 MC_Halt 時,可能需要同步停止防止產生誤差。
- 安全考慮:
- 急停可能會對機械系統造成沖擊,需謹慎使用,特別是在高精度和高負載應用中。
MC_Stop和MC_Halt的區別
上圖清晰地揭示了兩條不同的狀態路徑及其最終影響。簡單來說:
- MC_Halt 像“暫停”,停止后允許隨時繼續。
- MC_Stop 像“強制停止并鎖住”,停止過程中和完成后(在
Execute復位前)都拒絕其他指令。
下面是兩者在狀態機變化上更詳細的對比:
| 特性 | MC_Halt | MC_Stop |
|---|---|---|
| 觸發狀態 | 通常在 ContinuousMotion 或 DiscreteMotion |
在任何運動狀態 |
| 停止過程狀態 | DiscreteMotion |
Stopping |
| 停止完成狀態 | Standstill |
Standstill (需 Execute 置 FALSE 后) |
| 停止優先級 | 較低,可被其他運動指令中斷 | 最高,不可中斷,會中止其他運動指令 |
| 停止完成后 | 可立即接受新的運動指令 | 在 Execute 保持為 TRUE 時,阻塞新運動指令 |
| 停止位置 | 未定義 | 按預設減速度停止 |
| 主要應用場景 | 暫時暫停運動,后續需要繼續運動 | 安全停止、緊急停止或流程結束后的完全停止 |
狀態機變化過程詳解
MC_Halt 的狀態流程
當軸正在運動(例如處于 ContinuousMotion 狀態)時執行 MC_Halt:
- 觸發停止:
MC_Halt的Execute輸入出現上升沿。 - 狀態轉換:軸狀態從
ContinuousMotion轉變為DiscreteMotion。此時軸正在減速。 - 停止完成:當軸速度降至零后,
MC_Halt的Done輸出為TRUE,軸狀態從DiscreteMotion轉變為Standstill(保持靜止)。 - 關鍵特性:在
DiscreteMotion狀態停止過程中,可以啟動新的運動指令(如MC_MoveRelative)來中斷停止過程,軸會立即開始執行新的運動。
MC_Stop 的狀態流程
當軸正在運動時執行 MC_Stop:
- 觸發停止:
MC_Stop的Execute輸入置為TRUE。 - 狀態轉換:軸狀態立即轉變為
Stopping。這是一個獨立的高優先級狀態。 - 停止完成與保持:
- 當軸速度降至零后,
MC_Stop的Done輸出變為TRUE。 - 但軸狀態會保持在
Stopping,而不會立即返回Standstill。 - 只有在
MC_Stop的Execute輸入被置為FALSE后,軸狀態才會從Stopping轉變為Standstill。
- 當軸速度降至零后,
- 關鍵特性:只要軸處于
Stopping狀態,就無法啟動任何新的運動指令。這是它與MC_Halt最根本的區別之一,確保了停止的不可中斷性和絕對性。
如何選擇?
根據控制需求來選擇:
- 如果你只是想暫停運動,并計劃在停止后立即執行新的運動(如切換點動模式或重新定位),請使用
MC_Halt。 - 如果你需要進行安全、徹底的停止,并且希望確保在停止過程完成之前不會發生任何意外運動,請使用
MC_Stop。這在緊急停止或流程結束時非常關鍵。
重要的注意事項
MC_Stop的Execute信號:務必注意,MC_Stop完成后需要將Execute置為FALSE,才能使軸狀態從Stopping返回Standstill,從而解除對后續運動指令的阻塞。若Execute一直為TRUE,軸將無法接受任何新命令。- 錯誤狀態
ErrorStop:如果軸因故障進入ErrorStop狀態,無論是MC_Halt還是MC_Stop通常都無法執行。必須先使用MC_Reset功能塊來清除故障,使軸返回Standstill狀態后,才能進行正常的停止或其他運動操作。

 浙公網安備 33010602011771號
浙公網安備 33010602011771號