
優先隊列
概念和性質
- 優先隊列是允許至少下列兩種操作的數據結構:插入(Insert)和刪除最小者(DeleteMin)
- 實現優先隊列的數據結構叫二叉堆,他有兩個性質,結構性(完全二叉樹)和堆序性((min)堆或(max)堆),堆的操作必須要到堆的所有性質都被滿足才能終止
- 堆是一顆被完全填滿的二叉樹,在樹的底層上的元素從左到右填入的,這樣的樹叫完全二叉樹。可以證明一顆高為\(h\)的完全二叉樹有\(2^h\)到\(2^{h + 1} - 1\)個節點,他的高為\(?log N?\)
- 可以用一個數組來表示一個完全二叉樹,對于數組中任意位置\(i\)上的元素,其左兒子在位置\(2i\)處,右兒子在位置\(2i + 1\)處,它的父親在位置\(?i / 2?\)處,
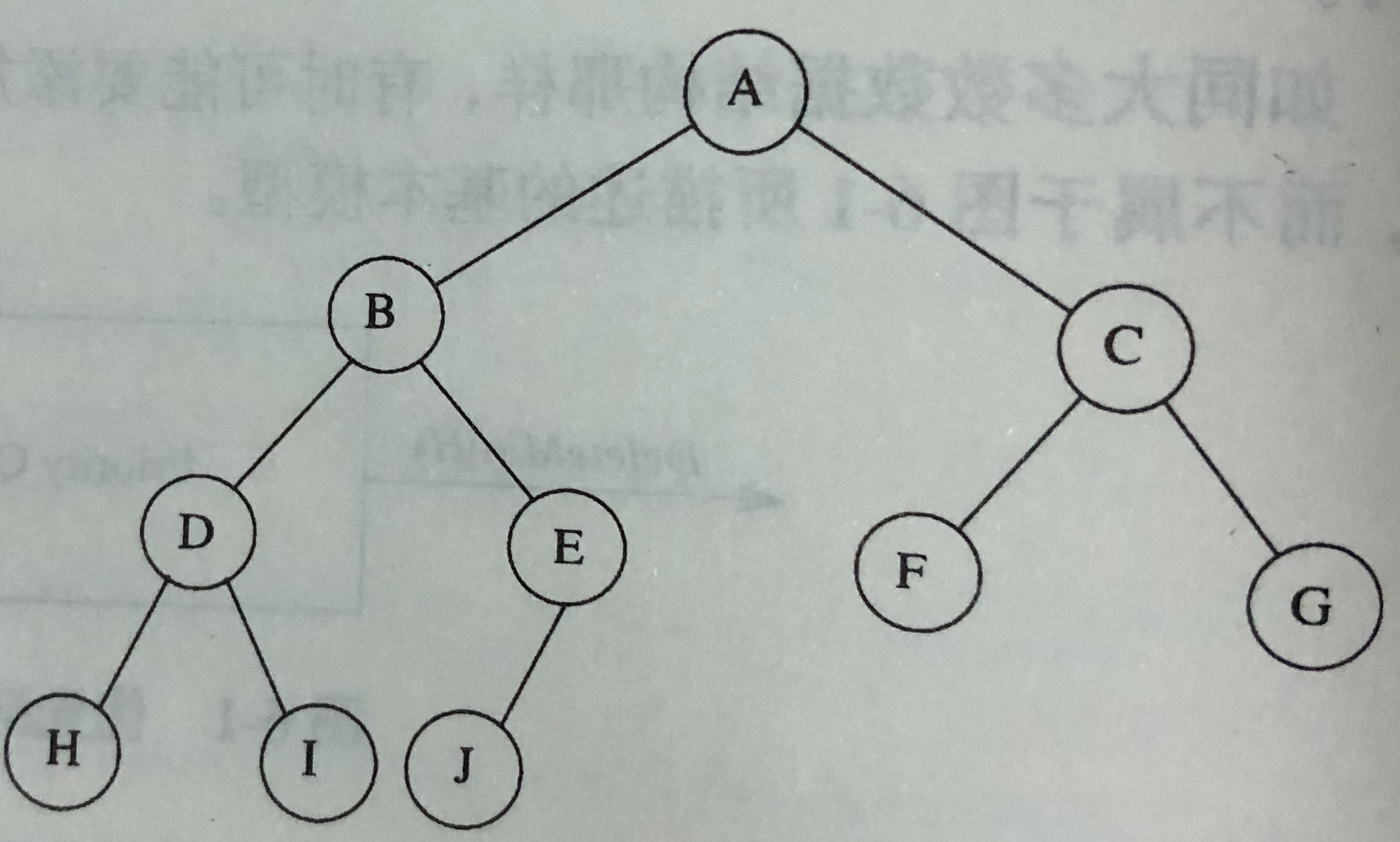
數組中的元素 | | A | B | C | D | E | F | G | H | I | J | |
-|-|-|-|-|-|-|-|-|-|-|-|-|-|-|-
數組的下標 | 0 | 1 | 2 | 3 | 4 | 5 | 6 | 7 | 8 | 9 | 10 | 11 | 12
- 它的數據結構為
struct HeapStruct;
typedef struct HeapStruct *PriorityQueue;
struct HeapStruct
{
int Capacity;
int Size;
ElementType *Elements;
}
基本操作
插入
void Insert(ElementType X, PriorityQueue H)
{
int i;
if (IsFull(H))
{
Error("Priority queue is Full");
return;
}
for (i = ++H->Size; H->Element[i / 2] > X; i /= 2) H->Element[i] = H->Element[i / 2];
H->Element[i] = X;
}
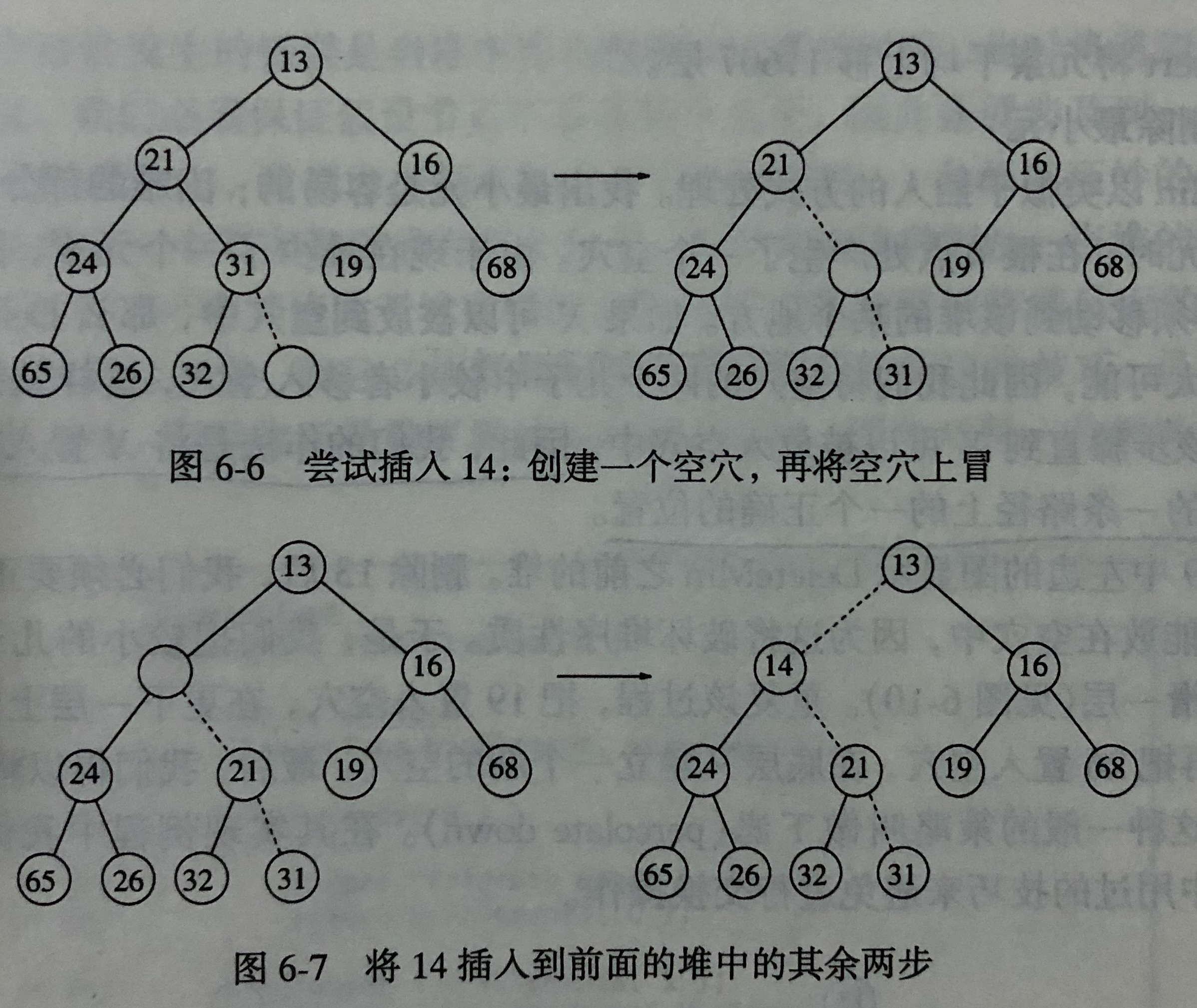
- 它的策略是先在尾部創建一個空穴,然后與它的父節點比較,如果比它的父節點小,則將父節點的值賦給空穴位置,然后與父節點的父節點比較,這種策略叫做上濾,如果插入的元素是新的最小元素,則它將一直上濾到根的位置,所以插入的最壞情形時間復雜度為\(\mathrm{O}(log N)\)
這里還有一個小問題,當\(i = 1\)時程序必須跳出循環,雖然說可以用一個
if判斷來跳出,但這里(書上)使用的方法是在位置0處放一個保證小于堆中的任何值的一個值,避免了每次循環都要執行一次測試,個人感覺也是一條思路吧
刪除最小者
ElementType DeleteMin(PriorityQueue H)
{
int i, Chile;
ElementType MinElement, LastElement;
if (IsEmpty(H))
{
Error("Priority queue is empty")
return;
}
MinElement = H->Elements[1];
LastElement = H->Elements[H->Size--];
for (i = 1; i * 2 <= H->Size; i = Child)
{
Child = i * 2;
if (Child != H->Size && H->Elements[Child + 1] < H->Elements[Child]) Child++;
if (LastElement > H->Elements[Child]) H->Elements[i] = H->Elements[Child];
else break;
}
H->Elements[i] = LastElement;
return MinElement;
}
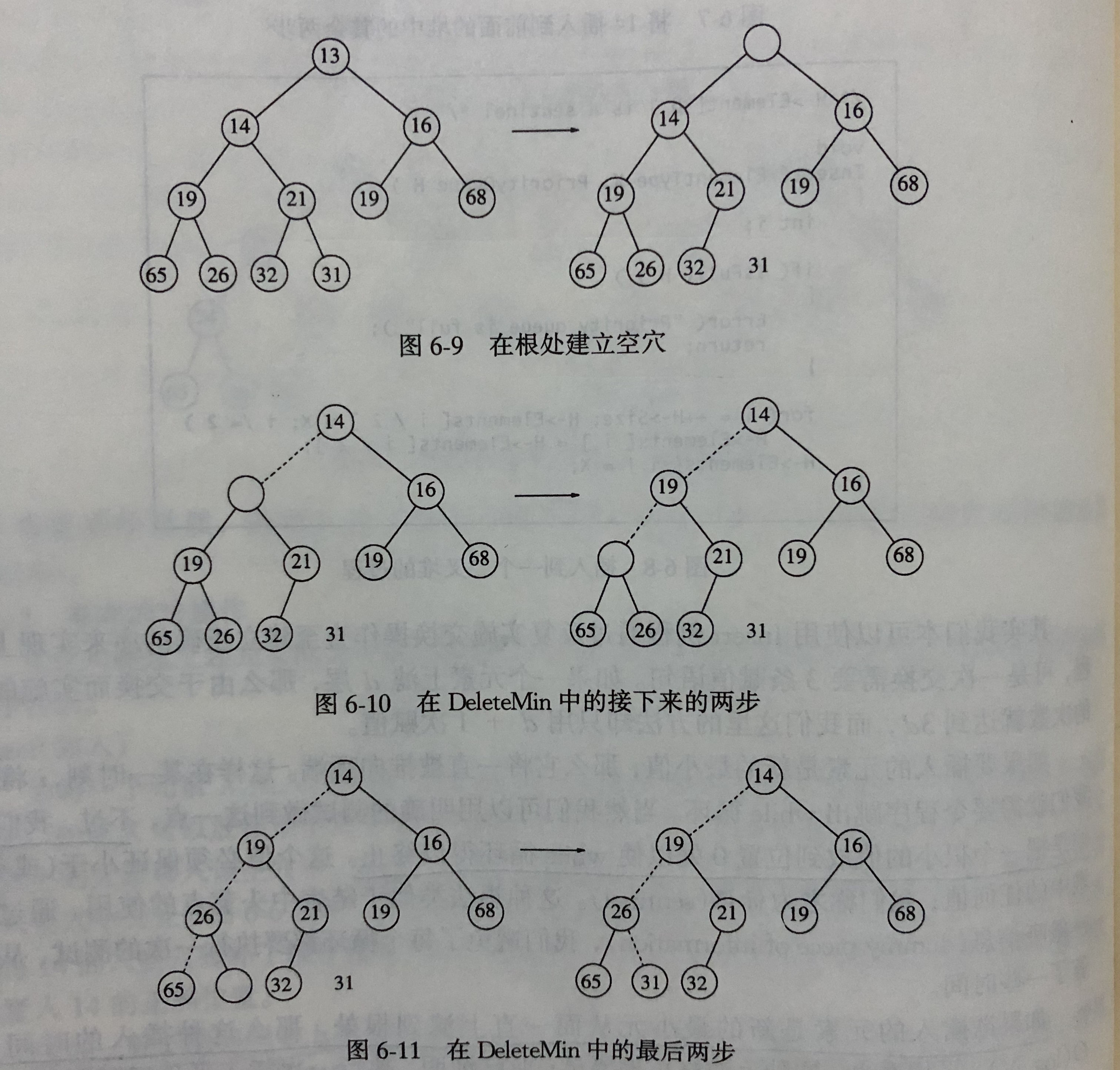
- 找到最小元素很簡單,就是根的位置,將其刪除后為了保持堆的堆序性自然要進行一系列的調整,此時在根的位置上就出現了一個空穴,并且位于堆的最后一個元素\(X\)也必須找到一個合適的位置,所以從根開始,對比它的兒子節點與\(X\)的大小,如果是兒子節點中的某一個更小,則將其放入根處的空穴,此時就又出現了一個空穴,按同樣的方法繼續向下推進,直到\(X\)可以正確的放入堆中,這個策略叫下濾,算法的最壞情形時間復雜度為\(\mathrm{O}(log N)\)
這里需要考慮的一個問題是一個父節點并不總是有兩個兒子節點,所以會有這么一條判斷
if (Child != H->Size && H->Elements[Child + 1] < H->Elements[Child]) Child++;,它有效的保證了不會越界訪問元素并且判斷了兩個子節點的大小(如果有的話)

 浙公網安備 33010602011771號
浙公網安備 33010602011771號