
sift算法理解
SIFT(Scale-Invariant Feature Transform)
尺度不變特征轉換(Scale-invariant feature transform或SIFT)是一種電腦視覺的算法用來偵測與描述影像中的局部性特征,它在空間尺度中尋找極值點,并提取出其位置、尺度、旋轉不變量,此算法由 David Lowe在1999年所發表,2004年完善總結。在CNN用來圖像特征提取之前,SIFT算是手工設計特征提取算法的巔峰了。關于sift算法,有很多大佬講的很好了,參考:
-
SIFT原始論文翻譯:
http://www.rzrgm.cn/cuteshongshong/archive/2012/05/25/2506374.html
-
大佬講解文章:
https://blog.csdn.net/zddblog/article/details/7521424
https://blog.csdn.net/qq_37174526/article/details/100052271
http://www.rzrgm.cn/Alliswell-WP/p/SIFT.html
-
源碼學習:
vlFeat: vision Lab Feature library
? https://github.com/vlfeat/vlfeat
? https://www.vlfeat.org/overview/sift.html
opencv
python:
首先看一下sift特征提取和匹配算法的步驟:
- 構建尺度空間, 生成高斯差分金字塔(DOG金字塔)
- 空間極值點檢測(關鍵點的初步查探)
- 穩健關鍵點的精確定位和篩選
- 精確定位:離散空間的局部極值,通過迭代法尋找連續空間極值
- 閾值篩選:消除小于閾值的極值
- 消除邊緣效應:去除掉可能是圖片卷積過程中邊緣效應產生的極值點
- 穩定關鍵點的方向信息分配
- 關鍵點描述
- 特征點匹配
sift詳細解釋,大佬們已經講的很好了,這里只記錄下自己的一些困惑和理解,希望能幫助到和我一樣的同學。(個人理解不一定完全對,歡迎糾錯)
1. 高斯差分金字塔
sift為什么要建立高斯差分金字塔呢?弄清楚這個,得注意兩個關鍵詞:高斯, 差分。
高斯
熟悉圖像處理的同學,都知道高斯卷積核能用來平滑圖像,使圖像變得模糊,如opencv中的GaussianBlur函數。而sift算法是為了找到尺度不變的特征點,就是圖片中物體的特征點不隨尺度變化,所以要得到物體不同尺度下的圖片,對圖片進行高斯卷積可以模擬物體在不同尺度下的圖片(想象下,我們把圖片縮小,圖片中的物體會變小,同時也變得模糊)
差分
得到物體在不同尺度下的圖片后,很明顯下一步要做的就是特征提取,所謂圖片特征就是特別突出的像素點,如比局部背景像素點都大的像素點,就是圖像處理中常說的邊緣,角點等。在圖像處理中,laplacian算子能用來提取物體邊緣,觀察下laplacian卷積核,就能發現laplacian算子找到的這些邊緣都是局部極值,如下是一個3x3的laplacian卷積核:(比周圍四個像素點都大或都小才會被提取出來)
所以總結下,先對圖片進行高斯卷積,再進行拉普拉斯卷積,就能得到不同尺度下物體的特征,這一步驟常稱為高斯拉普拉斯(LoG, Laplacian of Gaussian),但是這個計算比較耗時,大佬們發現了一種近似LoG的算法,但是計算更加簡單,就是高斯差分(DoG, Difference of Gaussian)。 高斯差分DoG的步驟,就是采用不同sigma的高斯核分別對兩幅圖片進行卷積,然后求兩幅圖片相減,即差分。
采用LoG提取特征,LoG具有旋轉不變性:http://www.rzrgm.cn/Alliswell-WP/p/Laplace_Gaussian.html
關于Dog是LoG的近似,推導過程:http://www.rzrgm.cn/silence-cho/p/13621975.html
2. 穩健關鍵點的精確定位和篩選
sift算法在找到尺度空間中的極值點后,還進行了一步精確定位和篩選,從而獲得穩定的關鍵點,主要包括三步:
- 精確定位:離散空間的局部極值,通過迭代法尋找連續空間極值
- 閾值篩選:消除小于閾值的極值
- 消除邊緣效應:去除掉可能是圖片卷積過程中邊緣效應產生的極值點
2.1 精確定位
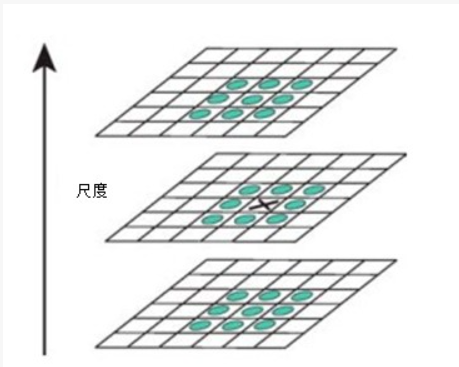
在確定極值點時,是通過與其鄰近的26個點作比較,如下圖所示,中間尺度圖片上的點,與同一尺度的8個點,上下兩個尺度各9個點,共26個點進行大小比較,確定其是不是極值點。如果我們建立一個三維坐標系,包括x, y, s三個維度,分別表示圖片的x軸方向,y軸方向,以及圖片的尺度,對于三個維度下的每個整數坐標點與其鄰域26個整數坐標點進行比較,很明顯我們得到是一個離散空間極值點,如果想要得到連續空間的極值點,則需要對這個極值點的位置進行修正,即精確定位極值點。
如何確定連續空間的極值點呢?一提到極值點,熟悉深度學習的同學很快就會想到梯度下降法和牛頓迭代法,sift這里采用的就是類似的牛頓迭代法。牛頓迭代法的公式如下:
上述公式含義就是, 對于函數\(f(x)\),在坐標點\(x^{(t)}\),沿著\(- H_t^{-1}g_t\)方向移動,就能得到函數值比其更小的值,只要我們進行不斷的迭代,坐標點就會收斂于極值點處。
所以回到我們的原始問題中,在圖像上某一點處,我們是能計算該像素點處的一階導數和二階導數,也就能得到梯度\(g\)和海森矩陣\(H\), 那么在離散空間的極值點處,通過牛頓迭代法,就能得到連續空間的極值點。可以看下sift算法源碼中是怎么計算的:
有x, y, s三個維度,所以梯度為三個維度的一階偏導數,海森矩陣是三個維度的二階偏導數, 即:
看下代碼實現:
梯度計算
def computeGradientAtCenterPixel(pixel_array):
dx = 0.5 * (pixel_array[1, 1, 2] - pixel_array[1, 1, 0])
dy = 0.5 * (pixel_array[1, 2, 1] - pixel_array[1, 0, 1])
ds = 0.5 * (pixel_array[2, 1, 1] - pixel_array[0, 1, 1])
return array([dx, dy, ds])
函數說明:
"""Approximate gradient at center pixel [1, 1, 1] of 3x3x3 array using central difference formula of order O(h^2), where h is the step size
# With step size h, the central difference formula of order O(h^2) for f'(x) is (f(x + h) - f(x - h)) / (2 * h)
# Here h = 1, so the formula simplifies to f'(x) = (f(x + 1) - f(x - 1)) / 2
# NOTE: x corresponds to second array axis, y corresponds to first array axis, and s (scale) corresponds to third array axis
"""
海森矩陣計算
def computeHessianAtCenterPixel(pixel_array):
center_pixel_value = pixel_array[1, 1, 1]
dxx = pixel_array[1, 1, 2] - 2 * center_pixel_value + pixel_array[1, 1, 0]
dyy = pixel_array[1, 2, 1] - 2 * center_pixel_value + pixel_array[1, 0, 1]
dss = pixel_array[2, 1, 1] - 2 * center_pixel_value + pixel_array[0, 1, 1]
dxy = 0.25 * (pixel_array[1, 2, 2] - pixel_array[1, 2, 0] - pixel_array[1, 0, 2] + pixel_array[1, 0, 0])
dxs = 0.25 * (pixel_array[2, 1, 2] - pixel_array[2, 1, 0] - pixel_array[0, 1, 2] + pixel_array[0, 1, 0])
dys = 0.25 * (pixel_array[2, 2, 1] - pixel_array[2, 0, 1] - pixel_array[0, 2, 1] + pixel_array[0, 0, 1])
return array([[dxx, dxy, dxs],
[dxy, dyy, dys],
[dxs, dys, dss]])
函數說明:
"""Approximate Hessian at center pixel [1, 1, 1] of 3x3x3 array using central difference formula of order O(h^2), where h is the step size
"""
# With step size h, the central difference formula of order O(h^2) for f''(x) is (f(x + h) - 2 * f(x) + f(x - h)) / (h ^ 2)
# Here h = 1, so the formula simplifies to f''(x) = f(x + 1) - 2 * f(x) + f(x - 1)
# With step size h, the central difference formula of order O(h^2) for (d^2) f(x, y) / (dx dy) = (f(x + h, y + h) - f(x + h, y - h) - f(x - h, y + h) + f(x - h, y - h)) / (4 * h ^ 2)
# Here h = 1, so the formula simplifies to (d^2) f(x, y) / (dx dy) = (f(x + 1, y + 1) - f(x + 1, y - 1) - f(x - 1, y + 1) + f(x - 1, y - 1)) / 4
# NOTE: x corresponds to second array axis, y corresponds to first array axis, and s (scale) corresponds to third array axis
然后計算\(- H_t^{-1}g_t\)時,一般不直接計算H的逆矩陣,而是采用最小二乘法求解矩陣方程的方式,如下所示,矩陣方程\(Hx = g\)的解x正是我們需要的值,而矩陣方程的解可以采用最小二乘法求解。
計算處\(- H_t^{-1}g_t\)后,分別對x,y,s三個維度坐標值進行更新,sift算法中只對大于0.5的值進行更新,太小就不更新(小于0.5,說明此處就是極值點,不需要更新),而且只進行了5次迭代,看下代碼如下:
for attempt_index in range(num_attempts_until_convergence): # num_attempts_until_convergence=5,表示5次迭代
# need to convert from uint8 to float32 to compute derivatives and need to rescale pixel values to [0, 1] to apply Lowe's thresholds
first_image, second_image, third_image = dog_images_in_octave[image_index-1:image_index+2]
pixel_cube = stack([first_image[i-1:i+2, j-1:j+2],
second_image[i-1:i+2, j-1:j+2],
third_image[i-1:i+2, j-1:j+2]]).astype('float32') / 255.
gradient = computeGradientAtCenterPixel(pixel_cube) # 梯度值g
hessian = computeHessianAtCenterPixel(pixel_cube) # 海森矩陣H
extremum_update = -lstsq(hessian, gradient, rcond=None)[0] # 最小二乘法求解H^-1 *g
if abs(extremum_update[0]) < 0.5 and abs(extremum_update[1]) < 0.5 and abs(extremum_update[2]) < 0.5:
break
j += int(round(extremum_update[0])) #更新x
i += int(round(extremum_update[1])) #更新y
image_index += int(round(extremum_update[2])) #更新s
# make sure the new pixel_cube will lie entirely within the image
if i < image_border_width or i >= image_shape[0] - image_border_width or j < image_border_width or j >= image_shape[1] - image_border_width or image_index < 1 or image_index > num_intervals:
extremum_is_outside_image = True
break
迭代結束后,精確定位了極值點位置, 根據泰勒公式可以得到該位置對應極值點的近似值,泰勒公式的二次展開如下:
上面式子中,\(\vec X = (x, y, s)\)表示尺度空間中某一點,即從 \(\vec X_0\) 移動到 \(\vec X\) 處,根據我們迭代公式知道,移動值\(\vec X-\vec X_0\)為\(- H_t^{-1}g_t\),帶入上述公式得到:
對應代碼中如下:
functionValueAtUpdatedExtremum = pixel_cube[1, 1, 1] + 0.5 * dot(gradient, extremum_update) # extremum_update即為-H^-1g
牛頓迭代法參考: https://zhuanlan.zhihu.com/p/37588590
http://www.rzrgm.cn/happylion/p/4172632.html
2.2 閾值篩選
這一步比較簡單,在上述精確定位極值點位置后,根據泰勒公式得到該位置的對應極值,sift中設置了一個閾值(contrast_threshold),如果小于閾值就刪除掉這個極值點。
2.3 消除邊緣效應
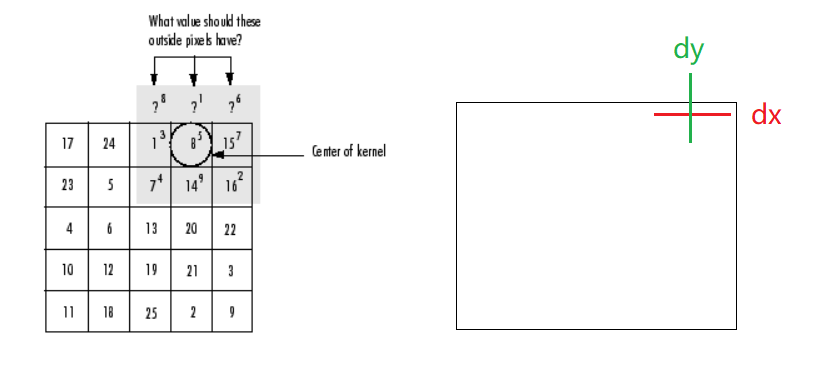
邊緣效應指對圖片進行卷積時,對于圖片上下左右邊界處的像素點,常需要對圖片補0,方便進行卷積運算,會導致邊界處產生較強的效應,得到錯誤的極值點。對于圖片邊界處錯誤的極值點,其x方向和y方向上二階導數,會出現一大一小。如下圖中,在圖片的上邊邊界,x方向上的二階導數dxx比較小(兩側都位于圖像中),y方向上的二階導數dyy較大(一側位于圖像中,對應值為像素值,另一側位于圖像外面,對應值為填充的0)
所以邊緣效應產生的極值點,一個方向上二階導數大,另一個方向上二階導數小,那么只需過濾掉兩者比值較大的極值點。上面計算的海森矩陣包括了x方向和y方向的二階導數,
假設\(dxx=\alpha, dyy=\beta, \alpha = r \beta\), 則可以構建下面的等式, 很明顯r=1時,這個表達式取得最小值,r大于1,或者小于1時,表達式值增大。所以只需要設置一個閾值,計算下面表達式的值,是否超過閾值即可。
代碼中如下:
functionValueAtUpdatedExtremum = pixel_cube[1, 1, 1] + 0.5 * dot(gradient, extremum_update)
if abs(functionValueAtUpdatedExtremum) * num_intervals >= contrast_threshold:
xy_hessian = hessian[:2, :2] # 海森矩陣
xy_hessian_trace = trace(xy_hessian) # α+β
xy_hessian_det = det(xy_hessian) # αβ
if xy_hessian_det > 0 and eigenvalue_ratio * (xy_hessian_trace ** 2) < ((eigenvalue_ratio + 1) ** 2) * xy_hessian_det: # eigenvalue_ratio 即為r
# Contrast check passed -- construct and return OpenCV KeyPoint object
keypoint = KeyPoint()
keypoint.pt = ((j + extremum_update[0]) * (2 ** octave_index), (i + extremum_update[1]) * (2 ** octave_index))
keypoint.octave = octave_index + image_index * (2 ** 8) + int(round((extremum_update[2] + 0.5) * 255)) * (2 ** 16)
keypoint.size = sigma * (2 ** ((image_index + extremum_update[2]) / float32(num_intervals))) * (2 ** (octave_index + 1)) # octave_index + 1 because the input image was doubled
keypoint.response = abs(functionValueAtUpdatedExtremum)
return keypoint, image_index
邊緣效應參考:http://www.rzrgm.cn/pegasus/archive/2011/05/19/2051416.html
https://blog.csdn.net/qq_34886403/article/details/83589108
https://zhuanlan.zhihu.com/p/366778678
3. 關鍵點描述
在生成關鍵點的描述子(128維向量)時,有個地方也值得注意下,sift算法采用了三線性插值(逆運算)。
如下圖所示,這里也有三個維度:x,y,angle,分別表示關鍵點的x值,y值,幅角,而對應的值f(x, y, angle)表示幅值。下面圖中紅色點是我們計算得到一個坐標點(x, y, angle), 這個坐標可能是小數,如(1.5, 1.5 1.5), 我們需要將其幅值分配到與其相鄰的八個整數坐標點上, 就需要采用三次插值逆運算,即分別在x維度,y維度,angle維度進行幅值分配。
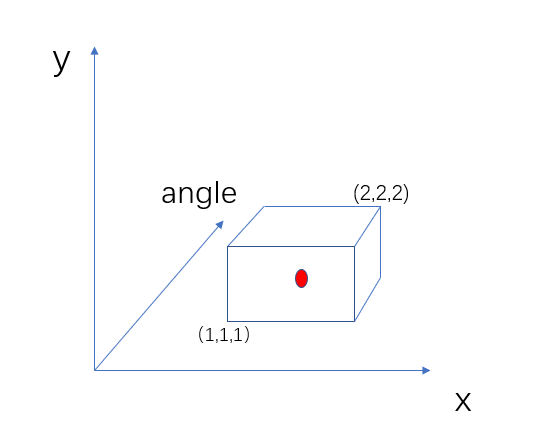
(注意:sift中將360度分成了8個區間,每個區間45度,所以angle維度中:1表示45度,2表示90度,。。。7表示360度)
最后,sift中還有很多細節和參數值計算方法,多看幾遍代碼和講解文章應該就清楚了。

 浙公網安備 33010602011771號
浙公網安備 33010602011771號