
手撕深度學習之CUDA矩陣乘法(上篇):從樸素實現到40倍性能提升的優化之旅
本文首發于本人微信公眾號,原文鏈接:https://mp.weixin.qq.com/s/mh7pXnh6-SM6yqdGBGVm0Q
摘要
本文是CUDA矩陣乘法系列文章的上篇。
這個系列會從一個最簡單的實現出發,逐步優化到cuBLAS標準庫86%的性能,并詳細介紹其中涉及到的CUDA性能優化技巧。
本文首先給出了一個開箱即用的實驗源代碼,然后介紹了GPU硬件知識以及3種簡單實現,逐步展示了把性能從cuBLAS的0.39%優化到16%,即性能提升40倍的“魔法”。
寫在前面
矩陣乘法在當今的AI世界扮演著至關重要的角色,神經網絡的前向傳播,注意力機制的計算等最終都可以使用矩陣乘法來實現,一次大模型的推理背后是數以億計的矩陣乘法操作。因此,矩陣乘法的執行性能是一個需要重點關注的優化目標。
目前CUDA平臺上已經有很多高效的矩陣乘法的實現,例如cuBLAS,CUTLASS。
為了探究這些高效實現背后的原理,本文會從一個最簡單的矩陣乘法內核出發,通過逐步優化的方式來逐漸逼近cuBLAS的表現。
本系列文章會分為上下兩篇,上篇會介紹一下實驗環境,一些本系列會用到的GPU硬件知識,以及3種較為簡單的實現;下篇會繼續介紹剩下的4種更為復雜的實現。
參考資料
- 《How to Optimize a CUDA Matmul Kernel for cuBLAS-like Performance: a Worklog》,本文也是以這篇文章為主線展開的,文章鏈接 https://siboehm.com/articles/22/CUDA-MMM
- 《CUTLASS: Fast Linear Algebra in CUDA C++》,鏈接:https://developer.nvidia.com/blog/cutlass-linear-algebra-cuda/
- GodBolt:這是一個可以查看源代碼對應的匯編代碼的一個很好用的小工具,鏈接:https://godbolt.org/
實驗環境
實驗源代碼
本文實驗的源代碼已開源到了GitHub,鏈接:
https://github.com/QZero233/CudaMM
項目中包含了一個帶有正確性驗證的profiling工具,感興趣的朋友可以自行實現一些內核,然后使用這個工具來測試一下自己的實現的性能如何。
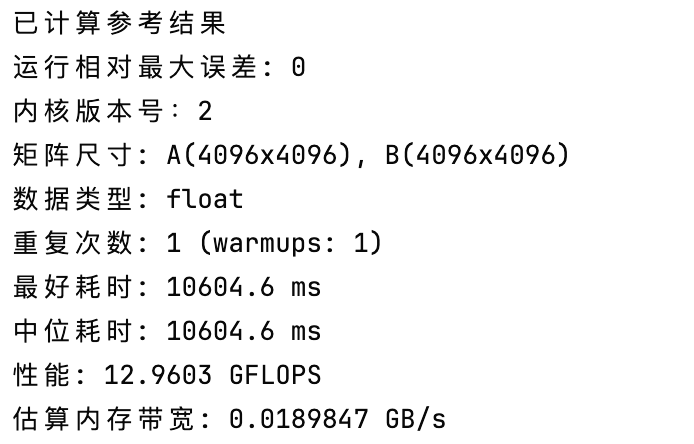
這個工具的運行結果如下圖所示,我們主要關注其中倒數第二行的以GFLOPS為單位的性能。

硬件環境
- 顯卡型號:NVIDIA GM107GL [Quadro K620]
- CUDA架構版本號:50
- CUDA版本:12.4
- NVCC版本:12
關于GPU你需要了解的那些事
從硬件視角看GPU
之前在CUDA并行規約那篇文章中提到過,在進行CUDA開發時,我們是以Grid,Block和Thread三級的層次結構來組織線程的,那么這三者是如何對應到具體的硬件實現的呢?
從硬件視角下看,一張顯卡里有一個GPU,GPU內部有多個流式多處理器(Streaming Multiprocessor,以下簡稱SM),如下圖所示:

接下來把視角轉向SM內部,每個SM有多個處理器,線程就是在這些處理器上具體執行的。
除此之外,每個SM還有一塊共享內存區域,之前文章里提到的共享內存(Shared Memory,以下簡稱SMEM)就是在這個區域,這個區域只能是SM內部的處理器訪問。SM內部的每個處理器又有著只能是自己訪問的寄存器(REGS)。
從這里也可以總結出GPU上內存訪問的速度排序,寄存器(REGS)是最快的,但是只能線程自身訪問;其次是SMEM,但是只能是Block內的線程訪問;最慢的是GMEM,GMEM就是我們通過cudaMalloc申請到的內存,所有線程均可訪問。
那么上述的線程層級架構又是怎么和這個硬件架構相對應的呢? 而且Warp在其中又是怎么體現的呢?這就得從線程調度的角度來看一個內核被啟動的過程了。
在啟動內核時,我們會指定GridDim和BlockDim,這就使得內核有了一定數量的線程塊(Block)需要執行,每個Block里有若干個Thread。在進行調度時,GPU會以Block為單位,把一個Block分給一個SM,這時候一個SM可能會被分到多個Block。
接下來就是SM的工作了,一個Block里連續的32個線程為一個Warp,SM會以Warp為單位進行調度,即SM會選擇32個連續的線程,然后放到32個處理器上運行。上述過程如下圖所示。

全局內存訪問合并
同一個Warp里的線程有很多有意思的特性,對這些特性加以利用就能夠達成不錯的優化效果,全局內存訪問合并(Global Memory Coalescing)就是其中之一。
這個特性是:如果一個Warp里的線程訪問的內存恰好是連續的32個4B的浮點數,那么GPU就只會做一次長度為128B的訪存操作, 把128B的數據讀取之后分發給32個線程。這里參考資料作者的精美的手繪圖可以很形象地說明這一點:

一些約定
在開始正式實現前,首先需要把一些容易混淆的設定給明確了。
- 本文默認所有矩陣都是行優先存儲的
- 本文中的x都是指行下標,y都是指列下標
如下圖所示:
(注:本文所有的內核實現都只是在大小為4096的方陣下進行了正確性驗證,如果要適配任意形狀需要考慮很多corner case,這有點偏離主線了,所以本文就暫時不做這方面的適配工作了。)
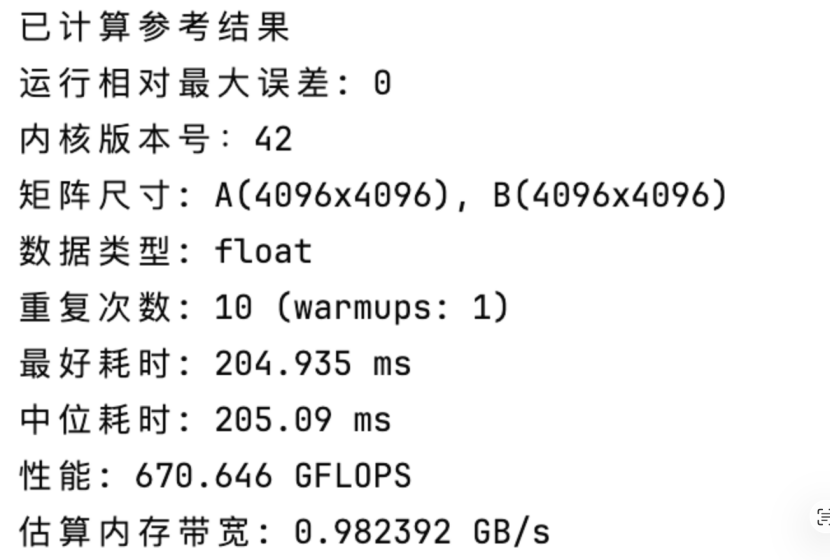
V42:cuBLAS
這里先放出cuBLAS實現的性能數據,供后續比較和參考
V1:Naive Kernel
對于矩陣乘法\(C = A \times B\),一個最樸素的想法就是讓每個線程都計算C中的一個元素,所以只需要一個Block,使用Thread的x和y表示要計算的C的元素坐標,然后2個for循環計算即可。
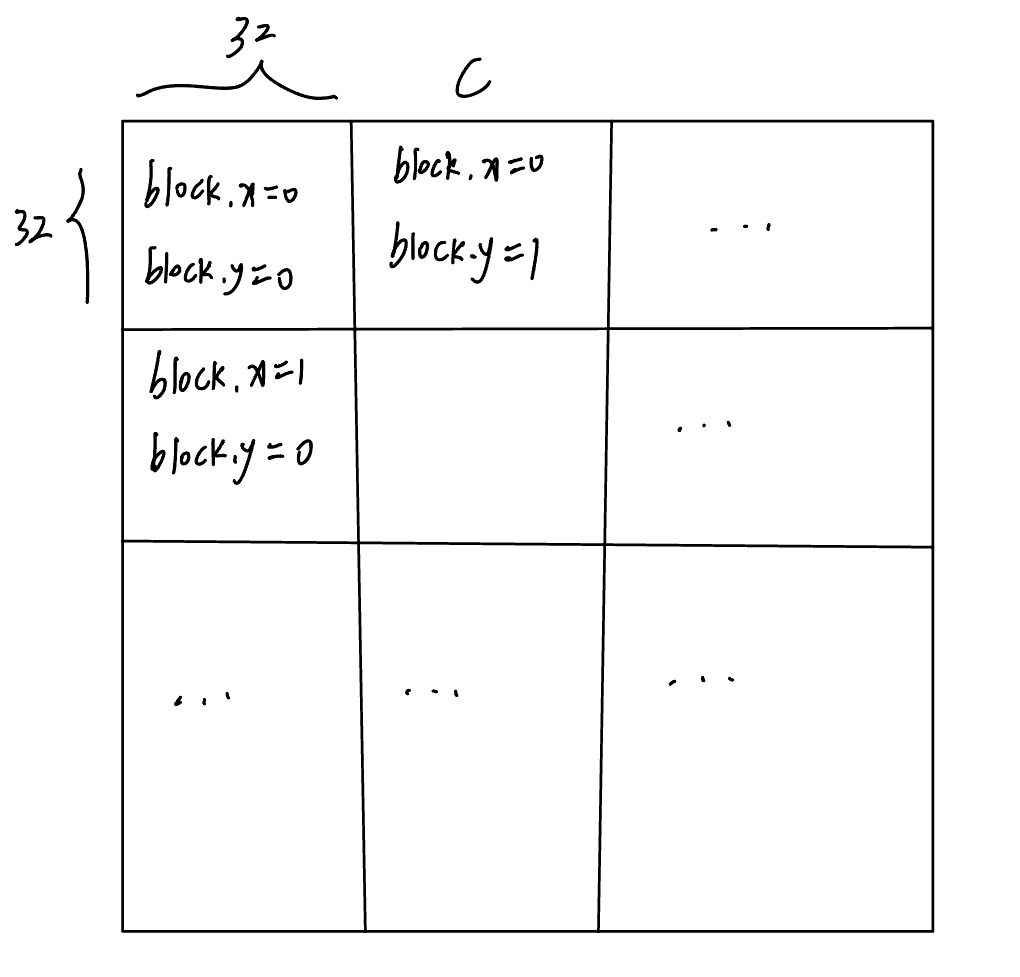
這個想法沒問題,只是在實現的時候,由于一個Block里面最多有1024個線程,所以需要進行一次分塊。
具體而言,可以把C分成若干個\(32 \times 32\)的塊(Tile),每個Tile交給一個Block進行計算,如下圖所示:
對于每個線程而言,首先需要根據計算出當前線程需要處理的C的坐標,然后用2個for循環計算結果并寫回即可。
至于布局,每個Block里自然是\(32 \times 32\)個線程,而Grid則是需要用向上取整的除法來分配盡量多的Block。
(注:理清楚每個線程需要計算哪些C的元素是不被后面更復雜的分塊繞暈的關鍵)
最終得到的源代碼如下所示:
__global__ void MatmulKernelV1(const scalar_t *a, const scalar_t *b, scalar_t *out, uint32_t M, uint32_t N, uint32_t P) {
uint32_t x = blockIdx.x * blockDim.x + threadIdx.x;
uint32_t y = blockIdx.y * blockDim.y + threadIdx.y;
if (x < M && y < P) {
scalar_t tmp = 0;
for (uint32_t k = 0; k < N; k++) {
// out[i][j] = a[i][k] * b[k][j]
tmp += a[x * N + k] * b[k * P + y];
}
out[x * P + y] = tmp;
}
}
void MatmulCoreV1(const scalar_t *a, const scalar_t *b, scalar_t *out, uint32_t M, uint32_t N, uint32_t P) {
dim3 grid(std::ceil(M / 32.0), std::ceil(P / 32.0), 1);
dim3 block(32, 32, 1);
MatmulKernelV1<<<grid, block>>>(a, b, out, M, N, P);
}
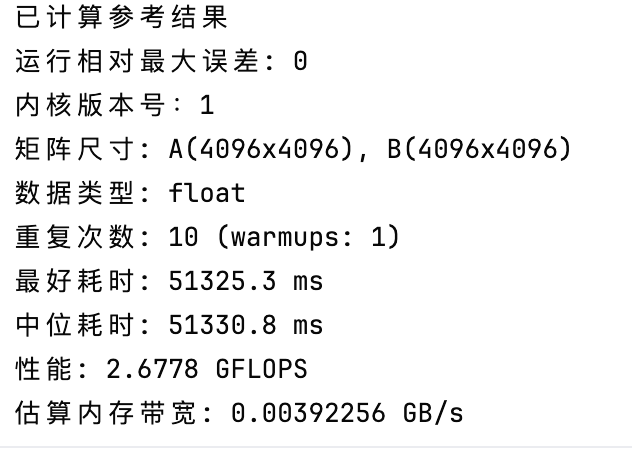
實驗數據
最終的性能數據如下所示:
性能只有cuBLAS的0.39%,可以說是相當拉垮了。
理論分析
這里先插入一段理論分析,來分析一下Naive Kernel可能的性能瓶頸在哪。
首先計算一下理論最快的運行時間,進行一個4096方陣的乘法所需要浮點運算次數為\(2 \times 4096^3\)(因為C有\(4096^2\)個元素,每個元素需要進行4096次乘法和加法),大約為137GFLO;
而內存讀取最低需要\(2 \times 4096^2 \times 4\,\text{B}\),約134MB,寫入需要\(4096^2 \times 4\,\text{B}\),約67MB。
實驗用的顯卡浮點數計算性能為870GFLOPS,顯存帶寬為29GB/s,所以理論上計算最快需要157ms,訪存共需要6.9ms,也就是說,理論上來講,矩陣乘法應該是計算瓶頸的。
但是我們的Naive Kernel似乎并不是這樣的,下面來詳細分析一下。
在計算次數上,如果不考慮計算下標的開銷,那它的計算次數就是和理論最低值相等的;
在內存訪問上,實際上每個線程都會訪問\(2 \times 4096\)次全局內存(GMEM),如果這些訪問沒有經過任何優化,那么這個內核一共就會有
\(4096^2 \times 2 \times 4096 \times 4\,\text{B} = 549\,\text{GB}\)
的訪存,需要耗時18.9s,已經是計算的120倍了,所以很顯然,目前的首要任務是優化內存訪問。
(注:這里內存訪問事實上并沒有計算的那么多,因為有一些Warp層的自動優化,這個后面馬上會提到)
V2:Global Memory Coalescing
這里可以像防止Bank Conflict那樣,通過調整每個線程負責的區域來實現Coalescing。
我們首先分析一下V1里面每個線程都在計算C的哪一個元素。通過代碼可以知道,線程計算的C的x坐標就是threadIdx.x,y坐標就是threadIdx.y,并且threadIdx是x先變化的,所以第一個線程計算的是(0, 0),第二個是(0, 1),以此類推,如下圖所示(用背景色來區分T0和T1加載的數據):
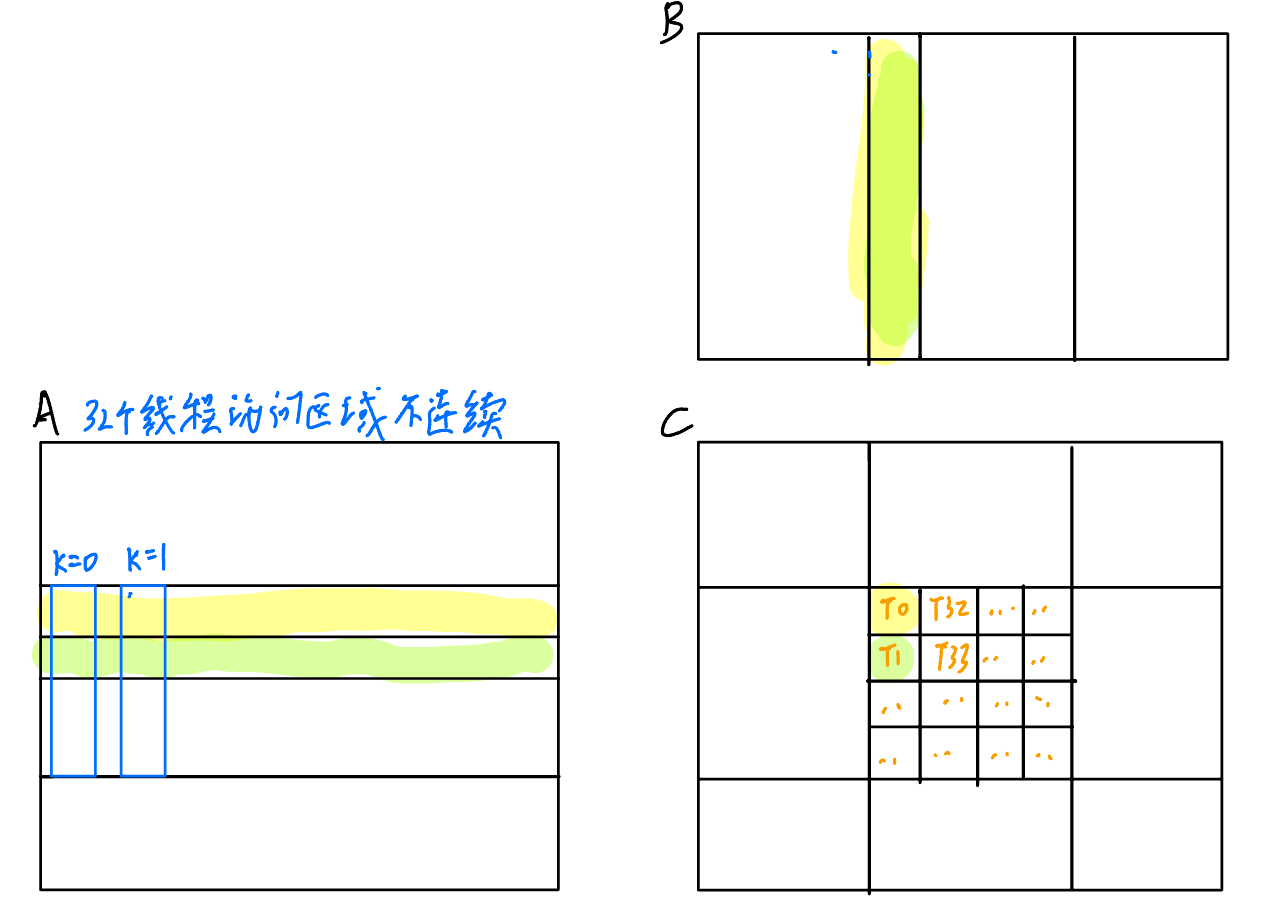
可以發現,一個Warp里計算的其實是C中的某一列,那么同一時刻,Warp里的線程訪問的A一定不是連續的,所以訪問A的部分一個Warp需要\(32 \times 4096\)次訪存,而訪問B的部分,由于一個Warp里的線程在同一時刻訪問的都是同一個B,所以這里只會有一次訪存開銷,那么訪問B總共就會有4096次訪存。
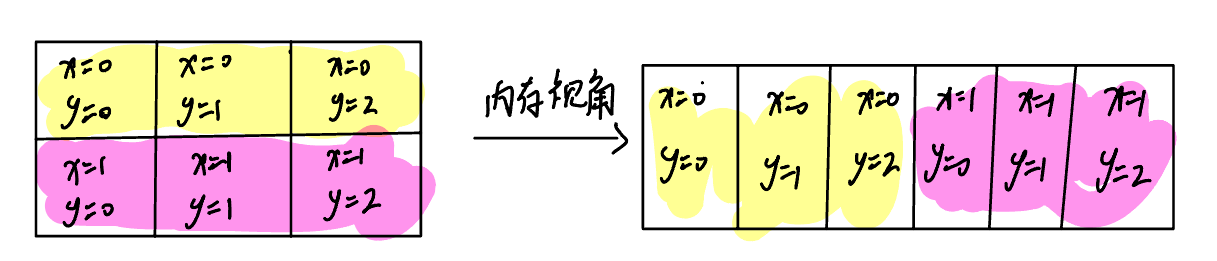
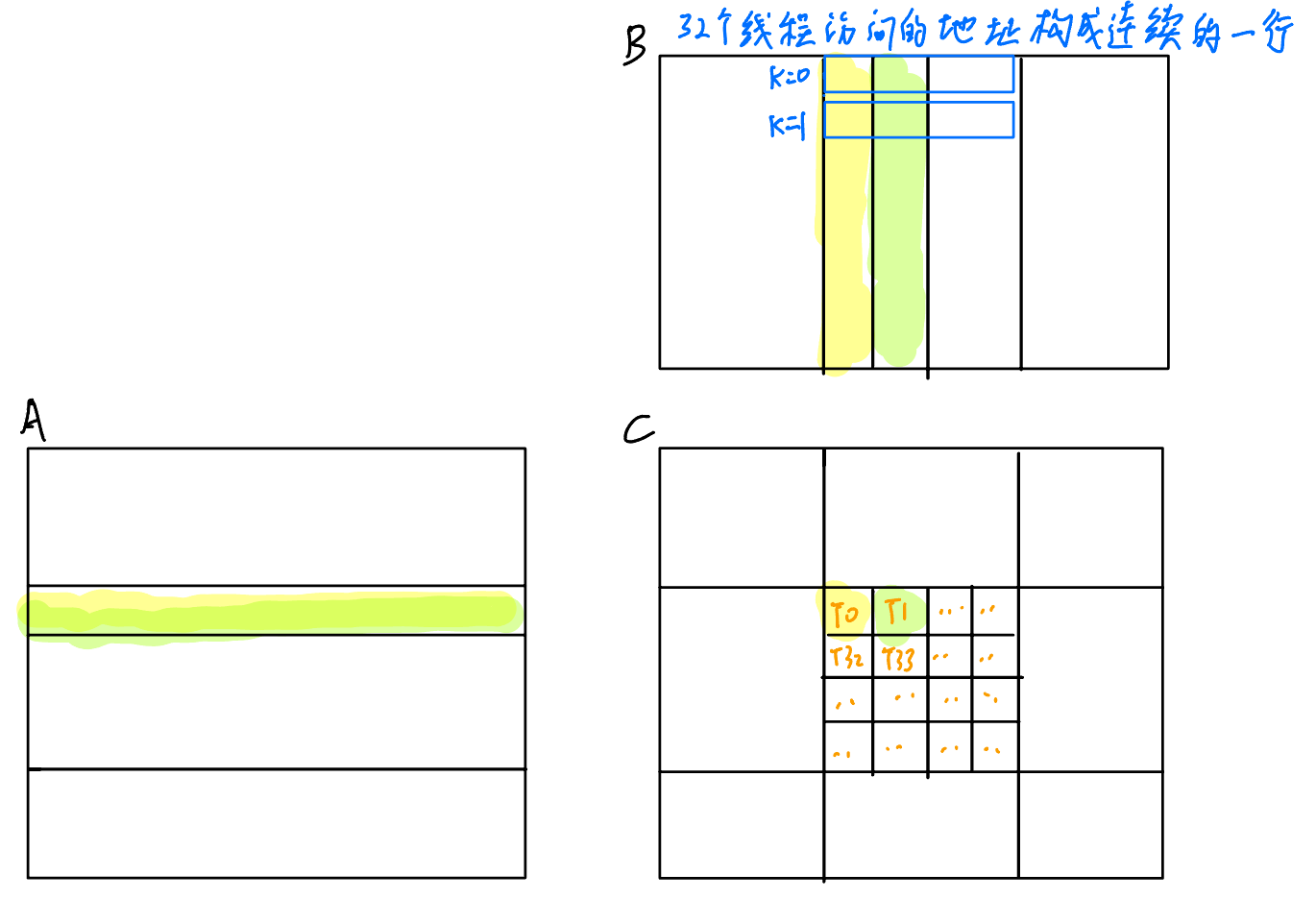
這里如果我們讓一個Warp計算C中的一行會怎么樣呢?那么訪問A就只需要4096次訪存,但是訪問B的時候,在同一時刻,線程們訪問的數據是連續的,此時就可以觸發Global Memory Coalescing,把32次訪存壓縮為1次,如下圖所示:
實驗數據

這里僅僅是對換一下x和y,性能就提升了接近8倍。
但是和cuBLAS相比,還是有不小的差距,目前也還只有cuBLAS性能的2%。
關于實現方式
具體實現時,只需要把x和y對換一下就行了。
參考資料作者在這里的實現是取消了threadIdx.y這個維度,然后把x維度的大小擴展為了1024,之后在線程內部根據threadIdx.x以及BlockSize來計算當前線程對應到C的坐標,如下所示:
constexpr uint32_t BLOCK_SIZE = 32;
__global__ void MatmulKernelV2(const scalar_t *a, const scalar_t *b, scalar_t *out, uint32_t M, uint32_t N, uint32_t P) {
// 相當于首先把OUT分成若干個32*32的Block,V1和V2都是如此,它們的區別在于Block內部的分配方式
// 這里blockIdx.x * BLOCK_SIZE, blockIdx.y * BLOCK_SIZE 就是在定位Block的起始x和y
const uint32_t x = blockIdx.x * BLOCK_SIZE + threadIdx.x / BLOCK_SIZE;
const uint32_t y = blockIdx.y * BLOCK_SIZE + threadIdx.x % BLOCK_SIZE;
......
個人認為這種實現肯定是不如直接對換x和y的,因為這種實現引入了除法和求余數這種非常昂貴的操作,但是實際測試下來兩種實現的性能是幾乎一致的。
于是我看了下兩種實現對應的PTX匯編,如下圖所示

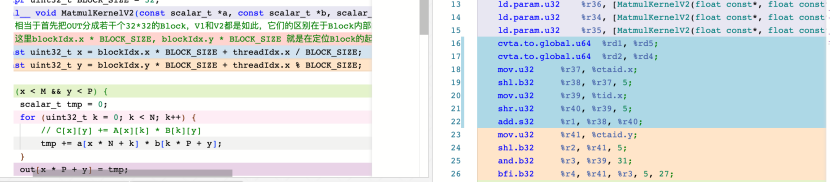
發現兩者指令數量幾乎都差不多,可能是因為這里BlockSize為2的整數次冪的關系吧,這種特性使得編譯器可以對求余數指令做優化,一般的求余數指令是需要用除法+減法來實現的。
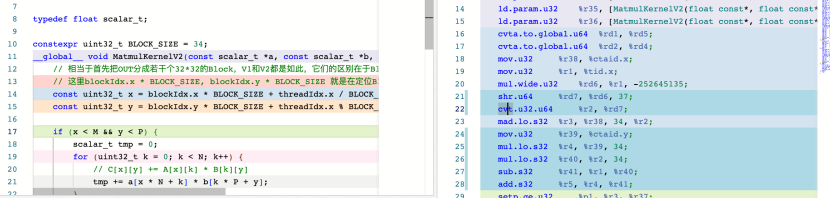
如下圖所示,可以看到,在把BlockSize換成34之后,確實多出來了一條sub指令。
在把BlockSize改成31然后實際運行后,確實出現了性能的損失。
所以,有時候大小為2的整數倍確實能帶來一些額外的驚喜。
V3:Shared Memory Cache-Blocking
前文提到過,存儲訪問速度是REGS > SMEM > GMEM,最理想的情況是每個線程所需的所有數據都加載到REGS里,但是這顯然不現實;
那么退而求其次地,如果能把每個Block所需要的數據都加載到SMEM里,也能減少很多GMEM的訪問次數。
雖然一個線程所需計算C的大小是固定的,比如\(32 \times 32\),C只需要A的32行和B的32列,但是A和B的形狀是不固定的,如果A的列很多,那也會擠爆SMEM。
這時候很自然的就能想到,如果我們用類似于滑動窗口的方法,每次加載固定大小的A和B到SMEM里,計算完成之后再繼續加載下一個窗口,并計算,這樣是否可行呢?
對于矩陣乘法這個操作而言,確實是可行的。我們以C中的某一個元素為例,如下圖所示:可以把A的對應行和B的對應列拆分為多個小塊W0,W1......,只需把對應的塊加載然后相乘之后累加,就能得到正確結果。
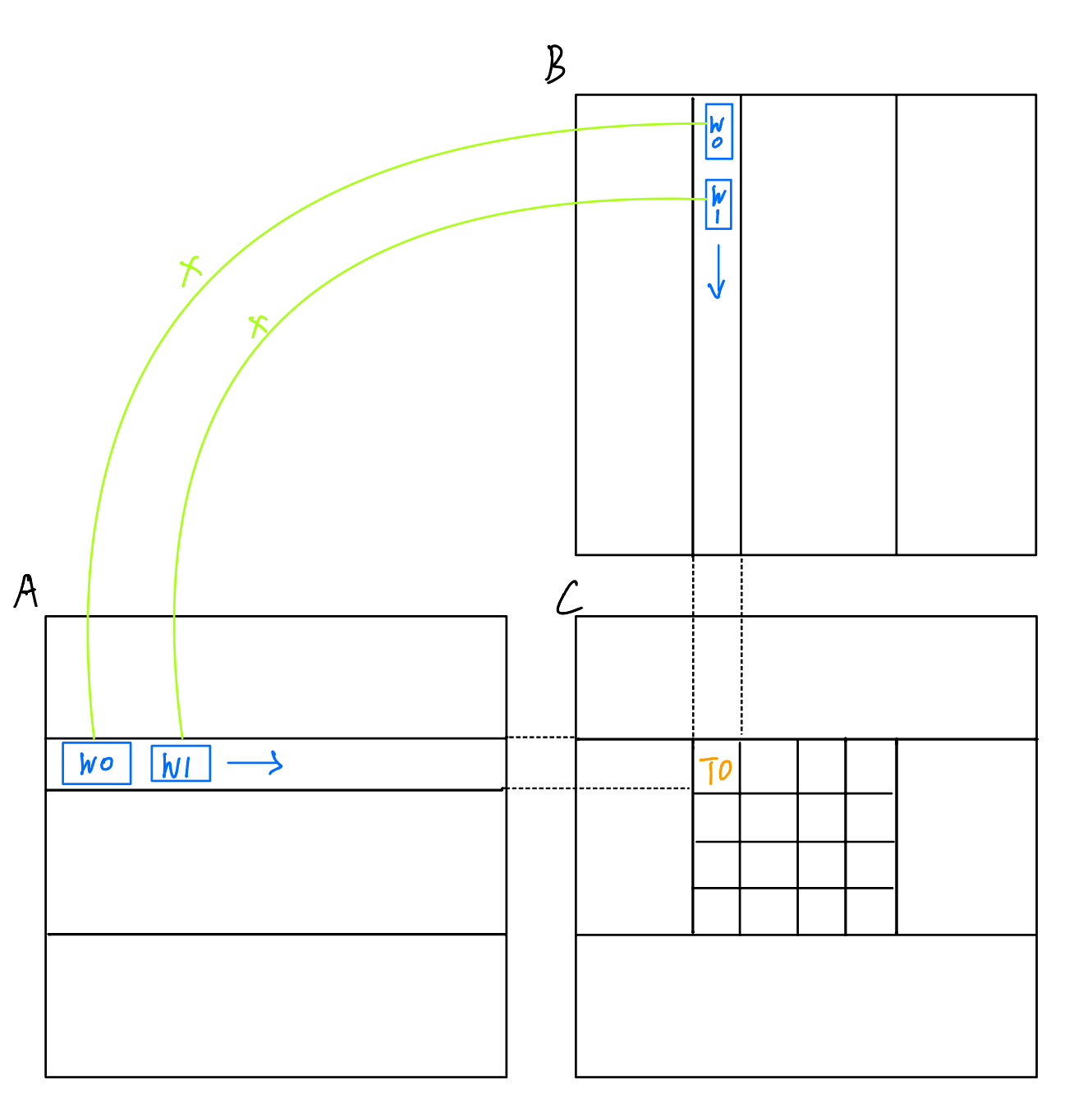
推廣到整個Block,我們就可以只加載所需行和列的部分數據到SMEM里,然后在SMEM里完成計算后再繼續加載,參考資料作者的圖可以很清晰地說明這一點:

具體實現
這里我們選取SMEM大小為\(32 \times 32\),也就是剛好和線程數量相等,這樣在加載數據到SMEM階段,只需要每個線程加載一個元素即可,可以一一對應上。
從線程的視角來看,首先需要確認當前要計算的元素在C的坐標,然后還需要知道自己需要加載的元素的坐標,這里要加載的元素的坐標和線程在Block里的坐標是相同的,所以實現起來難度不大。
具體實現如下所示:
__global__ void MatmulKernelV3(const scalar_t *a, const scalar_t *b, scalar_t *out, uint32_t M, uint32_t N, uint32_t P) {
__shared__ scalar_t As[BLOCK_SIZE * BLOCK_SIZE];
__shared__ scalar_t Bs[BLOCK_SIZE * BLOCK_SIZE];
const uint32_t x = blockIdx.x * BLOCK_SIZE + threadIdx.x / BLOCK_SIZE;
const uint32_t y = blockIdx.y * BLOCK_SIZE + threadIdx.x % BLOCK_SIZE;
if (x >= M || y >= P) {
return;
}
// 記 threadX, threadY 為 (x, y) 在OUT塊中的位置
// threadX = threadIdx.x / BLOCK_SIZE, threadY = threadIdx.x % BLOCK_SIZE
uint32_t threadX = threadIdx.x / BLOCK_SIZE;
uint32_t threadY = threadIdx.x % BLOCK_SIZE;
scalar_t tmp = 0;
for (int32_t k = 0; k < N; k += BLOCK_SIZE) {
// 加載 A[x][k] - A[x + BLOCK_SIZE][k + BLOCK_SIZE] 到 As
// 加載 B[k][y] - B[k + BLOCK_SIZE][y + BLOCK_SIZE] 到 Bs
// 計算 SUM(As[threadX][:] * Bs[:][threadY]) 存儲到 OUT[x][y]
As[threadX * BLOCK_SIZE + threadY] = a[x * N + (k + threadY)];
Bs[threadX * BLOCK_SIZE + threadY] = b[(k + threadX) * P + y];
__syncthreads();
// 注意:這里在矩陣大小<32時會出問題,因為As實際上沒裝滿
for (int32_t i = 0; i < BLOCK_SIZE; i++) {
tmp += As[threadX * BLOCK_SIZE + i] * Bs[i * BLOCK_SIZE + threadY];
}
__syncthreads();
}
out[x * P + y] = tmp;
}
實驗數據
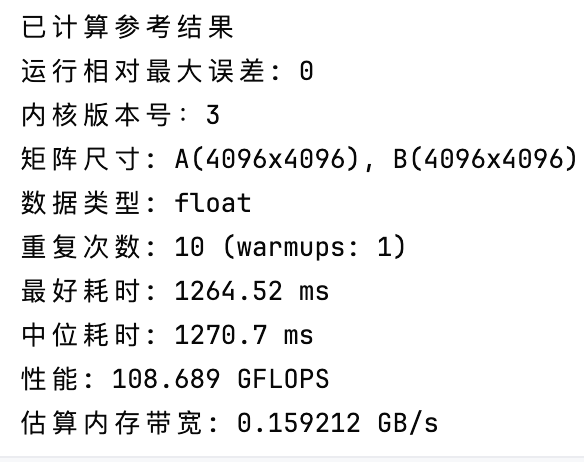
相較于V2,V3的性能直接提升了6倍多,此時的性能是cuBLAS的16%。

 浙公網安備 33010602011771號
浙公網安備 33010602011771號