
K230使用RTSP實現無線圖傳
K230 使用 RTSP 實現無線圖傳
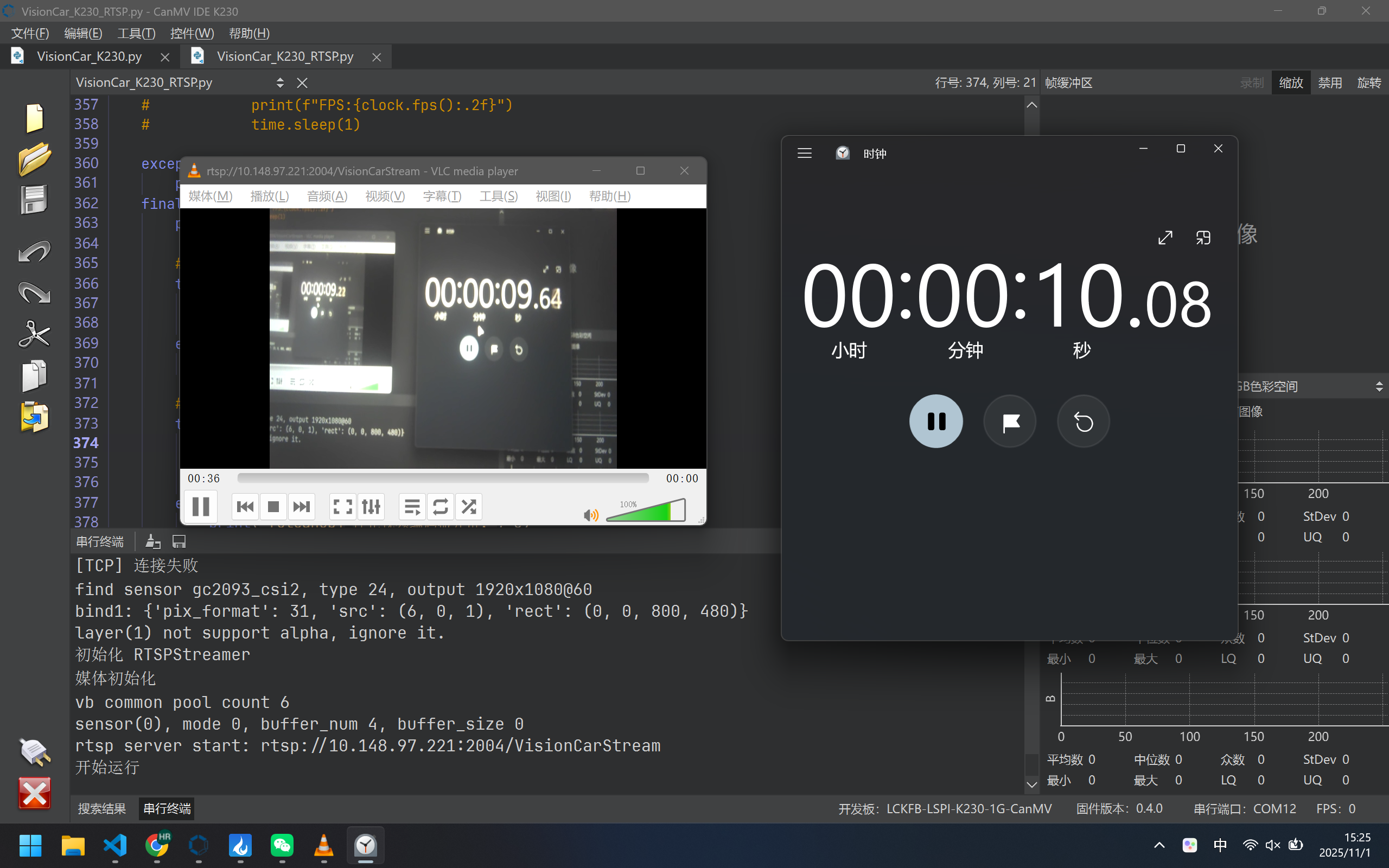
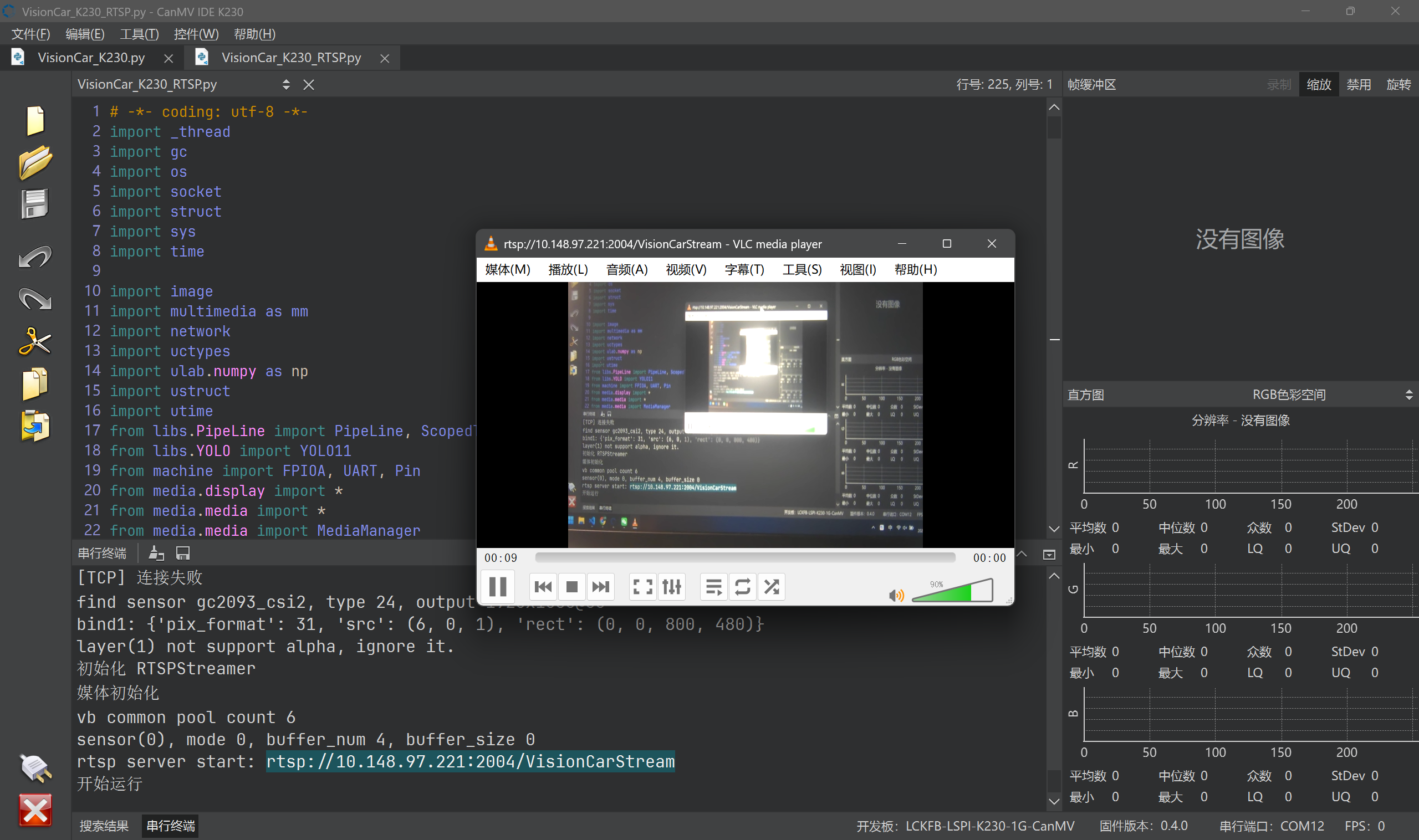
效果圖
開發環境
開發板:LCKFB-LSPI-K230-1G-CanMV
固件:CanMV_K230_LCKFB_micropython_v1.4-0-g6cce59c_nncase_v2.9.0.img
IDE:CanMV K230
播放器:VLC 播放器
RTSP 介紹
RTSP(Real-Time Streaming Protocol,實時流協議)是一種用于控制多媒體流(如音頻和視頻)傳輸的網絡控制協議。
幾種常用的圖傳協議對比
協議 用途 延遲 場景 RTSP 控制實時流 低(200ms~2s) 安防攝像頭、工業圖傳 HTTP-FLV / HLS 基于 HTTP 的流媒體 中~高(HLS 通常 3s+) 網頁直播、點播 WebRTC 端到端實時通信 極低(<500ms) 視頻通話、在線教育
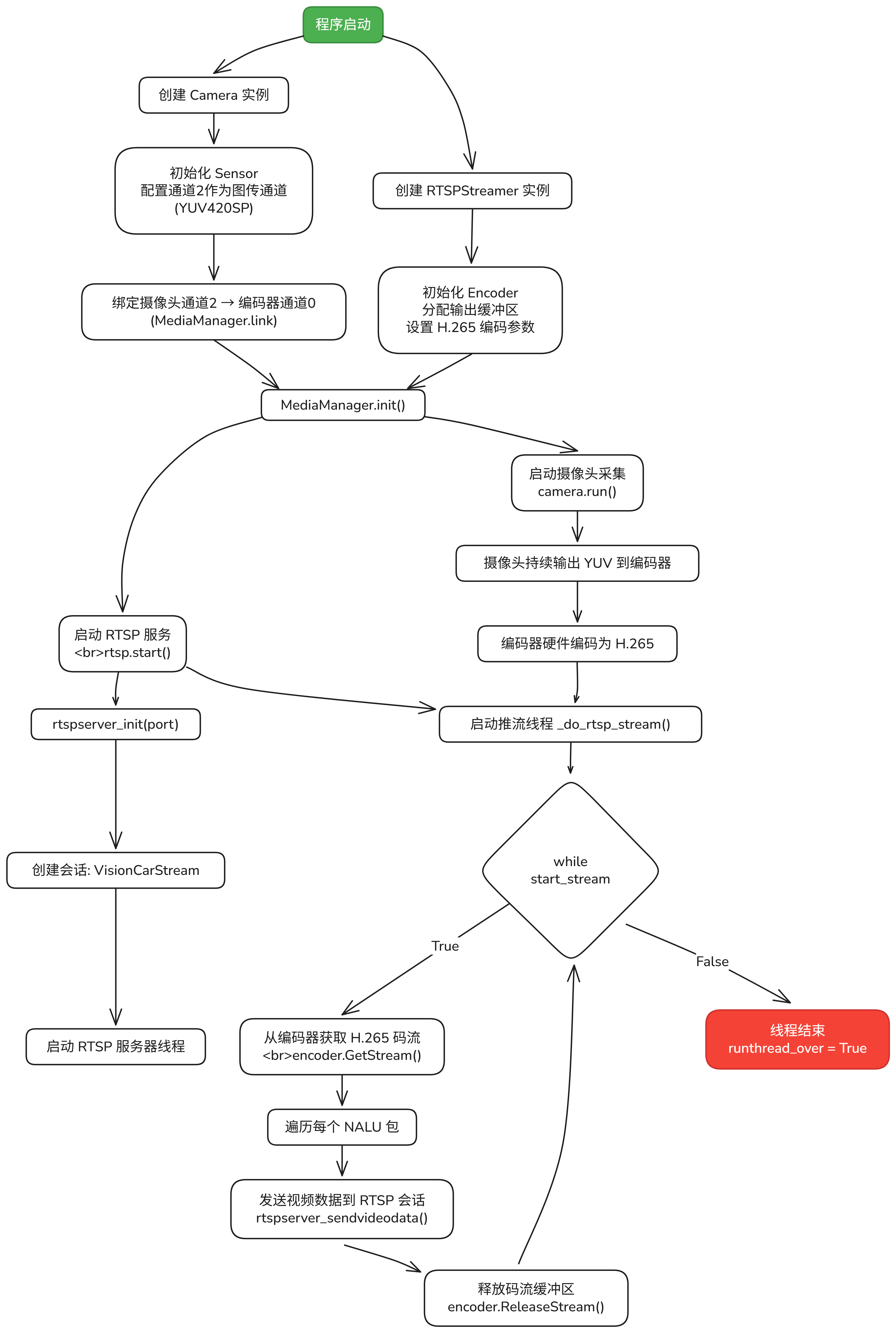
數據流圖

RTSP 類
class RTSPStreamer:
"""RTSP圖像流傳輸"""
def __init__(
self,
port=2004,
):
self.rtspserver = mm.rtsp_server() # 實例化 RTSP 服務器
self.video_type = mm.multi_media_type.media_h265 # 視頻編碼類型
self.session_name = "VisionCarStream" # 會話名稱
self.venc_chn = VENC_CHN_ID_0 # 視頻編碼通道
self.port = port # RTSP 服務器端口號
self.enable_audio = False # 是否啟用音頻
self.start_stream = False # 是否啟動推流線程
self.runthread_over = False # 推流線程是否結束
# 創建編碼器
self.encoder = Encoder()
self.encoder.SetOutBufs(self.venc_chn, 8, STREAM_WIDTH, STREAM_HEIGHT)
# 設置編碼參數,使用H265編碼
self.chnAttr = ChnAttrStr(
self.encoder.PAYLOAD_TYPE_H265,
self.encoder.H265_PROFILE_MAIN,
STREAM_WIDTH,
STREAM_HEIGHT,
)
self.streamdata = StreamData()
def __deinit__(self):
# 停止推流
self.stop()
self.encoder.Stop(self.venc_chn)
self.encoder.Destroy(self.venc_chn)
self.rtspserver.rtspserver_stop()
self.rtspserver.rtspserver_deinit()
def start(self):
self.encoder.Create(self.venc_chn, self.chnAttr)
self.encoder.Start(self.venc_chn)
self.rtspserver.rtspserver_init(self.port)
self.rtspserver.rtspserver_createsession(
self.session_name, self.video_type, self.enable_audio
)
# 啟動 RTSP 服務器
self.rtspserver.rtspserver_start()
# 啟動推流線程
self.start_stream = True
_thread.start_new_thread(self._do_rtsp_stream, ())
def stop(self):
if not self.start_stream:
return
# 等待推流線程退出
self.start_stream = False
while not self.runthread_over:
time.sleep(0.1)
self.runthread_over = False
def get_rtsp_url(self):
return self.rtspserver.rtspserver_getrtspurl(self.session_name)
def _do_rtsp_stream(self):
try:
while self.start_stream:
os.exitpoint()
self.encoder.GetStream(self.venc_chn, self.streamdata)
for pack_idx in range(0, self.streamdata.pack_cnt):
stream_data = bytes(
uctypes.bytearray_at(
self.streamdata.data[pack_idx],
self.streamdata.data_size[pack_idx],
)
)
self.rtspserver.rtspserver_sendvideodata(
self.session_name,
stream_data,
self.streamdata.data_size[pack_idx],
time.time(),
)
self.encoder.ReleaseStream(self.venc_chn, self.streamdata)
except BaseException as e:
print(f"Exception {e}")
finally:
self.runthread_over = True
# 停止 rtsp server
self.stop()
self.runthread_over = True
攝像頭類
class Camera:
def __init__(self):
"""攝像頭初始化"""
self.sensor = Sensor()
self.sensor.reset()
self.sensor.set_hmirror(False)
self.sensor.set_vflip(False)
# 通道2:圖傳(YUV420SP)
self.sensor.set_framesize(
width=STREAM_WIDTH,
height=STREAM_HEIGHT,
chn=CAM_CHN_ID_2,
alignment=12,
)
self.sensor.set_pixformat(Sensor.YUV420SP, chn=CAM_CHN_ID_2)
""" 攝像頭通道2綁定到視頻編碼器"""
bind_info_ID2 = self.sensor.bind_info(chn=CAM_CHN_ID_2)
self.link = MediaManager.link(
bind_info_ID2["src"],
(VIDEO_ENCODE_MOD_ID, VENC_DEV_ID, VENC_CHN_ID_0),
)
def __deinit__(self):
self.sensor.stop()
del self.link
def run(self):
self.sensor.run()
def capture_frame(self, chn=CAM_CHN_ID_0):
"""
返回一幀圖像數據
"""
return self.sensor.snapshot(chn)
# ---------- 攝像頭初始化 ----------
camera = Camera()
# ---------- RTSPStreamer ----------
print("初始化 RTSPStreamer")
rtsp = RTSPStreamer(RTSP_PORT)
# ---------- 媒體管理 ----------
print("媒體初始化")
MediaManager.init()
# ---------- 攝像頭采集 ----------
camera.run()
# ---------- 啟動 RTSPStreamer ----------
rtsp.start()
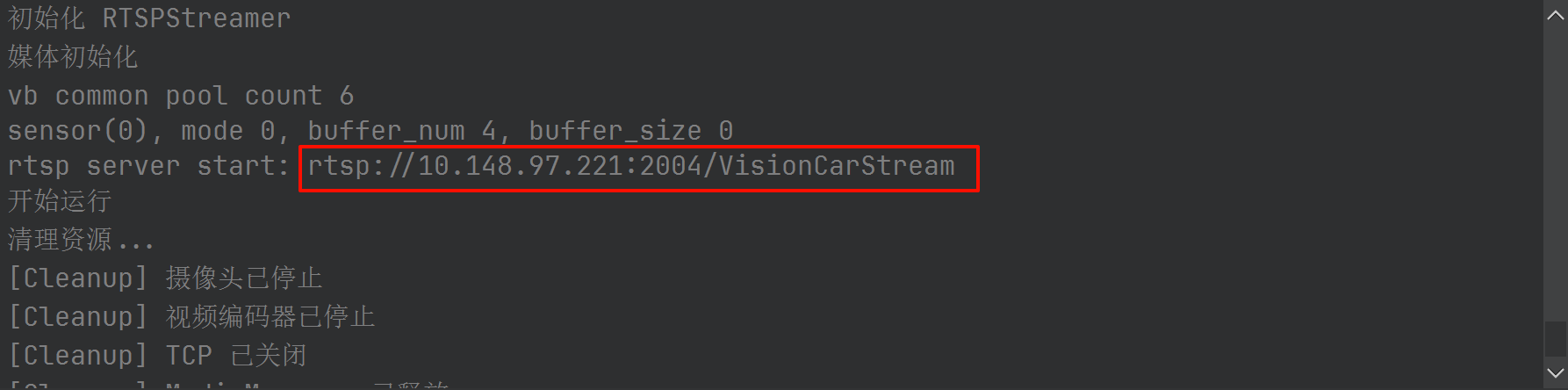
print("rtsp server start:", rtsp.get_rtsp_url())
完善程序后運行,在輸出窗口可以看到創建的 RTSP 服務地址
打開 RTSP 播放器,這里以 VLC 播放器為例
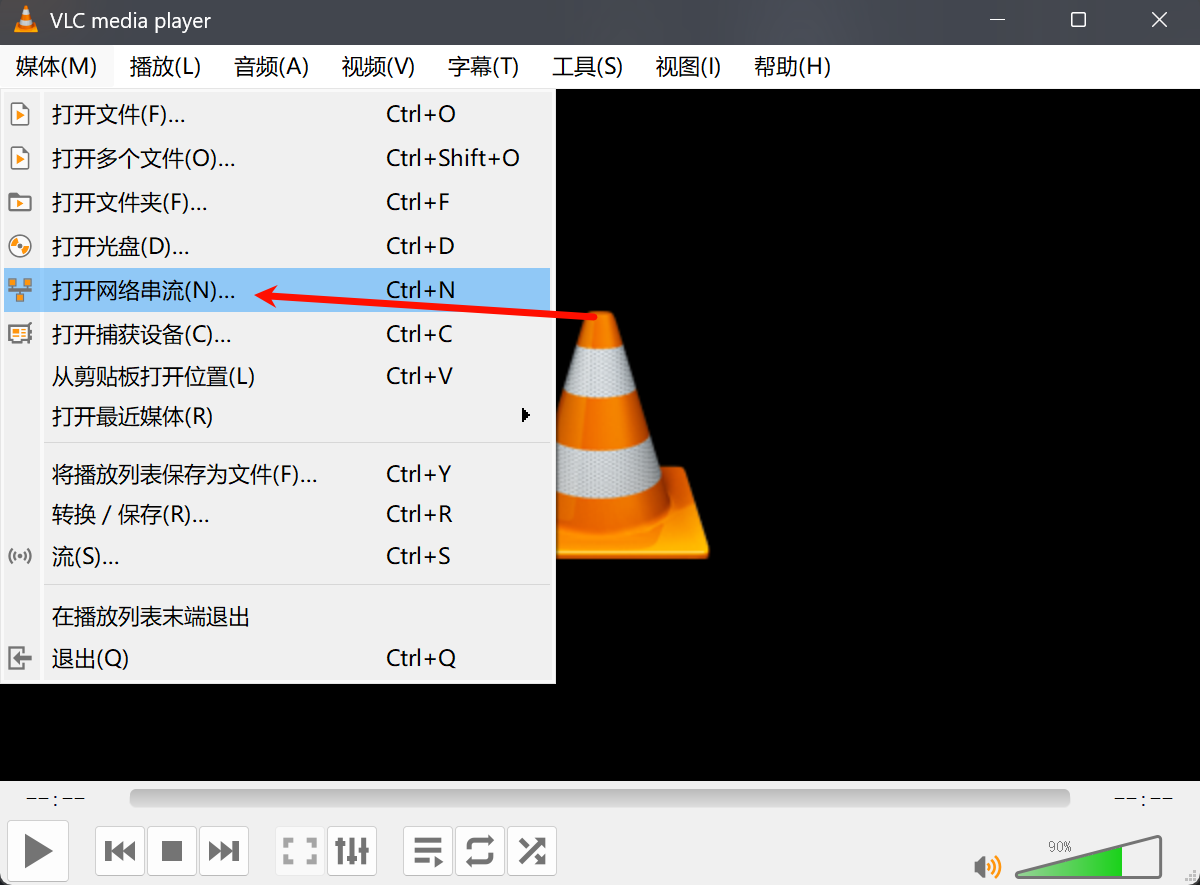

設置好后就可以看到 K230 傳的圖片了
參考
VENC 模塊 API 手冊
RTSP 模塊 API 手冊
立創·廬山派 K230CanMV 開發板
K230 結合 RTSP 實現無線圖傳

 浙公網安備 33010602011771號
浙公網安備 33010602011771號