【Ray Tracing The Next Week 超詳解】 光線追蹤2-1
Preface
博主剛放假回家就進(jìn)了醫(yī)院,今天剛完事兒,來續(xù)寫第二本書

Ready
我們來總結(jié)一下上一本書的筆記中我們的一些規(guī)定
1. 數(shù)學(xué)表達(dá)式
我們采用小寫粗黑體代表向量,大寫粗黑體代表矩陣,其他代表標(biāo)量
2.我們將eye(or camera)發(fā)出的光線稱為視線(sight)
3.我們目前將所有的非特定(不專屬于任何一個類)的通用物理數(shù)學(xué)運(yùn)算函數(shù)封裝到泛型庫中,并以lvgm命名空間限定,暫時不準(zhǔn)備劃分子命名空間
4.我們寫庫,擬采用全hpp書寫,因.h和.cpp之間關(guān)于父類純虛函數(shù)的子類相關(guān)聲明與實(shí)現(xiàn)出現(xiàn)了無法鏈接的神奇編譯錯誤,問過很多大佬,最后還是采用hpp
基礎(chǔ)工程代碼見第一本書總結(jié)篇
Chapter 1 Motion Blur
今天先來一個開胃菜,一個簡單易懂的技術(shù)——運(yùn)動模糊
先看效果
好像我們之前也提到過類似的模糊,例如:散焦模糊(defucos blur)
它和今天的模糊還是有一定區(qū)別的,從物理成因上講,defucos是因為未正確對焦,如果沒有玩過生活中的相機(jī)也沒關(guān)系,大家都用手機(jī)拍過照吧,有些時候,手機(jī)相機(jī)打開對著拍攝對象,屏幕中的物體或字跡的邊緣是模糊的,通常我們會做一個動作,即,點(diǎn)一下屏幕(會出現(xiàn)一個小框),然后圖像就會變清晰(邊緣明顯)
運(yùn)動模糊的意思是,現(xiàn)實(shí)世界中,相機(jī)快門開啟的時間間隔內(nèi),相機(jī)內(nèi)物體發(fā)生了位移,畫面最后呈現(xiàn)出來的像素,是移動過程中像素的平均值。它不是由相機(jī)造成的,而是由物體運(yùn)動狀態(tài)造成的形狀模糊,比如,你拍攝一張正在下落小球的照片,它所造成的模糊是在段時間內(nèi)停留在歷史軌跡中的重影
弄清楚這個,就開始我們的正題
如何模擬真實(shí)生活中的運(yùn)動模糊,我們先來回顧一下光線追蹤的過程
1. 我們選定屏幕中的一個位置,作為待計算的像素點(diǎn)
2. 從eye發(fā)出一條視線指向該上述位置周圍的采樣點(diǎn)
3. 如果中途有物體相交,那么根據(jù)物體表面材質(zhì)進(jìn)行視線計算
3. 至多遞歸計算50次,確定該位置的一個采樣值
4. 該位置周圍采樣100次,計算均值作為該位置的最終像素值
那么我們看一下上述過程中,需要改動哪些地方以支持模擬物體的運(yùn)動模糊行為
首先,我們只需要模擬相機(jī)快門開啟的時間間隔內(nèi)的物體運(yùn)動情況,所以,物體一定有一個運(yùn)動的起點(diǎn)和終點(diǎn)位置
如果是球體,我們用球心代表運(yùn)動的位置(heart1,heart2),另外相機(jī)時間間隔是一段時間,需要起止時間點(diǎn)確定(time1,time2)
其次,我們模擬物體運(yùn)動模糊,還要根據(jù)相機(jī)原理:畫面最后呈現(xiàn)出來的像素,是移動過程中像素的平均值
所以,我們依舊采用隨機(jī)取樣,我們之前已經(jīng)確定采樣像素點(diǎn)為100個,采樣周圍點(diǎn)是為了抗鋸齒,這一節(jié)我們更重要的是要采樣物體的運(yùn)動位置
我們有物體運(yùn)動的起止位置和起止時間點(diǎn)(確定運(yùn)動時間間隔),所以我們?nèi)?~1的隨機(jī)數(shù)作為物體從heart1到heart2運(yùn)動路徑長度比例,進(jìn)而確定物體在該隨機(jī)時刻的具體位置heart,我們?nèi)《鄠€隨機(jī)時間進(jìn)行采樣,之后再進(jìn)行均值處理,作為移動過程中像素的平均值
完成上述理論,還需在光線追蹤過程中下手
第一步就不用說了,就是確定屏幕位置
第二步就很重要了,視線發(fā)出就要接觸物體,也就是說視線產(chǎn)生就要確定該時刻的物體具體位置,因為它要和物體進(jìn)行相交計算,所以,視線承擔(dān)著記錄當(dāng)前時間點(diǎn)的作用
而我們還需要做運(yùn)動位置采樣,所以,eye需要發(fā)出多條視線,基于不同的隨機(jī)時間,這樣我們就做到了根據(jù)不同的隨機(jī)時間發(fā)出多條采樣視線對物體的運(yùn)動位置進(jìn)行采樣
我們不妨把抗鋸齒的采樣和運(yùn)動位置采樣視線生成放在一起
ray.hpp
/// ray.h // ----------------------------------------------------- // [author] lv // [begin ] 2019.1 // [brief ] the ray-class for the ray-tracing project // from the 《ray tracing The Next week》 // ----------------------------------------------------- #pragma once #include "RTdef.h" namespace rt { class ray { public: ray() :_a{ rtvec() } , _b{ rtvec() } { } ray(const rtvec& a, const rtvec& b, const rtvar time = 0.) :_a(a) , _b(b) ,_time(time) { } ray(const ray& r) :_a(r._a) , _b(r._b) { } inline rtvec origin()const { return _a; } inline rtvec direction()const { return _b; } inline rtvar time()const { return _time; } inline rtvec go(const rtvar t)const { return _a + t * _b; } private: rtvec _a; rtvec _b; rtvar _time; }; }
camera.hpp


這樣,我們就做好了產(chǎn)生記錄隨機(jī)時間的視線
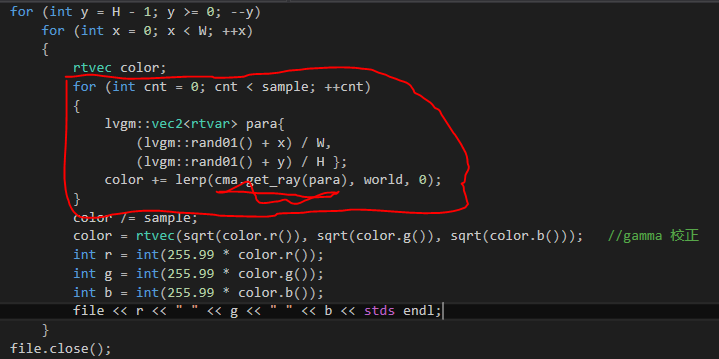
接下來就是采樣了
main.cpp
我們再來說第三步,視線和物體的相交計算
這個是最重要的,我們要 根據(jù)視線記錄的隨機(jī)時間,來確定物體的輪廓,然后進(jìn)行計算交點(diǎn)
顯然,我們不能用之前的sphere了
下面是我們新寫的moving_sphere
/// moving_sphere.h // ----------------------------------------------------- // [author] lv // [begin ] 2019.1 // [brief ] the moving_sphere-class for the ray-tracing project // from the 《ray tracing in one week》 // ----------------------------------------------------- #pragma once #include "ray.h" #include "intersect.h" namespace rt { class moving_sphere :public intersect { public: moving_sphere() { } moving_sphere(rtvec heart1, rtvec heart2, rtvar t1, rtvar t2, rtvar r, material* mp) :_heart1(heart1) , _heart2(heart2) , _time1(t1) , _time2(t2) , _radius(r) , _materialp(mp) { } virtual bool hit(const ray& r, rtvar tmin, rtvar tmax, hitInfo& info)const override; inline rtvec heart(rtvar t)const { return _heart1 + ((t - _time1) / (_time2 - _time1)) * (_heart2 - _heart1); } private: rtvec _heart1; rtvec _heart2; rtvar _time1; rtvar _time2; rtvar _radius; material* _materialp; }; bool moving_sphere::hit(const ray& sight, rtvar t_min, rtvar t_max, hitInfo& info)const { rtvec trace = sight.origin() - heart(sight.time()); rtvar a = dot(sight.direction(), sight.direction()); rtvar b = 2.0 * dot(trace, sight.direction()); rtvar c = dot(trace, trace) - _radius * _radius; rtvar delt = b*b - 4.0*a*c; if (delt > 0) { info.materialp = _materialp; rtvar x = (-b - sqrt(delt)) / (2.0*a); if (x < t_max && x > t_min) { info._t = x; info._p = sight.go(x); info._n = (info._p - heart(sight.time())) / _radius; return true; } x = (-b + sqrt(delt)) / (2.0*a); if (x < t_max && x > t_min) { info._t = x; info._p = sight.go(x); info._n = (info._p - heart(sight.time())) / _radius; return true; } } return false; } }
我們用vec3 heart(time);來計算某個隨機(jī)時間某個物體從開始位置向終止位置運(yùn)動time時間之后的具體位置
第四步和第五步就不說了,都是上述過程的重復(fù)自動計算
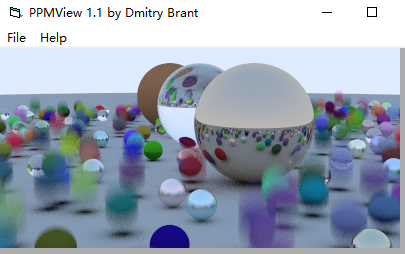
下面是開篇圖片中球體參數(shù)設(shè)置
intersect* random_sphere() { int cnt = 50000; intersect **list = new intersect*[cnt + 1]; list[0] = new sphere(rtvec(0, -1000, 0), 1000, new lambertian(rtvec(0.5, 0.5, 0.5))); int size = 1; for (int a = -10; a < 10; ++a) for (int b = -10; b < 10; ++b) { rtvar choose_mat = lvgm::rand01(); rtvec center(a + 0.9 * lvgm::rand01(), 0.2, b + 0.9*lvgm::rand01()); if ((center - rtvec(4, 0.2, 0)).normal()>0.9) { if (choose_mat < 0.75) list[size++] = new moving_sphere(center, center + rtvec(0, 0.5*lvgm::rand01(), 0), 0., 1., 0.2, new lambertian(rtvec(lvgm::rand01()*lvgm::rand01(), lvgm::rand01()*lvgm::rand01(), lvgm::rand01()*lvgm::rand01()))); else if (choose_mat < 0.9) list[size++] = new sphere(center, 0.2, new metal(rtvec(0.5*(1 + lvgm::rand01()), 0.5*(1 + lvgm::rand01()), 0.5*(1 + lvgm::rand01())), 0.5*lvgm::rand01())); else list[size++] = new sphere(center, 0.2, new dielectric(1.5)); } } list[size++] = new sphere(rtvec(0, 1, 0), 1.0, new dielectric(1.5)); list[size++] = new sphere(rtvec(-4, 1, 0), 1.0, new lambertian(rtvec(0.4, 0.2, 0.1))); list[size++] = new sphere(rtvec(4, 1, 0), 1.0, new metal(rtvec(0.7, 0.6, 0.5), 0.)); return new intersections(list, size); }
相機(jī)參數(shù)設(shè)置
rtvec lookfrom(13, 2, 3); rtvec lookat(0, 0, 0); float dist_to_focus = 10.0; float aperture = 0.0; camera cma(lookfrom, lookat, rtvec(0, 1, 0), 20, rtvar(W) / rtvar(H), aperture, 0.7*dist_to_focus, 0., 1.);
還有水平運(yùn)動模糊的圖片正在渲染中,完成之后會貼在下面
******************* 更新分割線 *************************
一個大球的水平運(yùn)動模糊
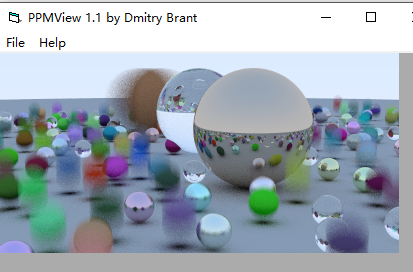
此外你可以控制起止時間間隔或者起止位置遠(yuǎn)近來調(diào)整小球運(yùn)動模糊的速度
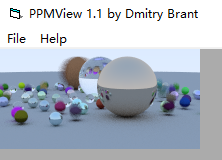
如果把上一張圖中運(yùn)動大球的運(yùn)動距離改為0.5長度,也就是
new moving_sphere(rtvec(-4.5, 1, 0.65), rtvec(-4.5,1,0.15)......
會得到下圖(球的數(shù)量和尺寸都改小了點(diǎn))
代碼參見(http://www.rzrgm.cn/lv-anchoret/p/10284085.html 末尾)
另外,之前的運(yùn)動球過多,各種球體的比例也做了調(diào)整(第一張圖)
intersect* random_sphere() { int cnt = 50000; intersect **list = new intersect*[cnt + 1]; list[0] = new sphere(rtvec(0, -1000, 0), 1000, new lambertian(rtvec(0.5, 0.5, 0.5))); int size = 1; for (int a = -10; a < 10; ++a) for (int b = -10; b < 10; ++b) { rtvar choose_mat = lvgm::rand01(); rtvec center(a + 0.9 * lvgm::rand01(), 0.2, b + 0.9*lvgm::rand01()); if ((center - rtvec(4, 0.2, 0)).normal()>0.9) { if (choose_mat < 0.55) list[size++] = new moving_sphere(center, center + rtvec(0, 0.5*lvgm::rand01(), 0), 0., 1., 0.2, new lambertian(rtvec(lvgm::rand01()*lvgm::rand01(), lvgm::rand01()*lvgm::rand01(), lvgm::rand01()*lvgm::rand01()))); else if (choose_mat < 0.85) list[size++] = new sphere(center, 0.2, new metal(rtvec(0.5*(1 + lvgm::rand01()), 0.5*(1 + lvgm::rand01()), 0.5*(1 + lvgm::rand01())), 0.5*lvgm::rand01())); else list[size++] = new sphere(center, 0.2, new dielectric(1.5)); } } list[size++] = new sphere(rtvec(0, 1, 0), 1.0, new dielectric(1.5)); list[size++] = new moving_sphere(rtvec(-4.5, 1, 0.95), rtvec(-4,1,0.1), 0., 1., 1.0, new lambertian(rtvec(0.4, 0.2, 0.1))); list[size++] = new sphere(rtvec(4, 1, 0), 1.0, new metal(rtvec(0.7, 0.6, 0.5), 0.)); return new intersections(list, size); }
感謝您的閱讀,生活愉快~

 浙公網(wǎng)安備 33010602011771號
浙公網(wǎng)安備 33010602011771號