[汽車/國家標準] GB/T 40429-2021《汽車駕駛自動化分級》
0 序
0.0 研讀背景
GB/T 40429《汽車駕駛自動化分級/Taxonomy of driving automation for vehicles》,作為智能網聯汽車行業-自動駕駛領域的核心標準之一,有必要進行深入閱讀和熟悉,以便筆者、讀者(汽車行業的研發工程師)理解和開展日常相關的軟件開發工作。
0.1 標準簡介
-
2021年8月20日,由工業和信息化部提出、全國汽車標準化技術委員會歸口的
GB/T 40429-2021《汽車駕駛自動化分級》推薦性國家標準由國家市場監督管理總局、國家標準化管理委員會批準發布(國家標準公告2021年第11號文),將于2022年3月1日起實施。 -
該標準為《國家車聯網產業標準體系建設指南(智能網聯汽車)》規劃的分類和編碼類推薦性國家標準項目(體系編號102-3),規定了汽車駕駛自動化分級遵循的【原則】、【分級要素】、各級別【定義】和【技術要求框架】,旨在解決我國汽車駕駛自動化分級的【規范性】問題。
0.2 制訂背景
-
汽車駕駛自動化是全球汽車技術及產業的重要發展趨勢,在為人們提供更加安全、舒適以及順暢的出行方式與物流解決方案的同時,不斷與人工智能、信息通信、智慧城市與交通等技術深度融合,正在重塑汽車及相關產業的生態體系和價值鏈體系。
-
近年來,國際及主要汽車產業國家和地區的標準法規組織廣泛開展汽車駕駛自動化分級的研究。
- 美國高速公路安全管理局(
NHTSA)在2013年率先提出將汽車駕駛自動化分為無自動化、特定功能自動化、組合功能自動化、有條件自動化和完全自動化共5個等級;- 德國聯邦交通研究所(
BASt)根據研究,將汽車駕駛自動化分為僅駕駛員、輔助駕駛、部分自動駕駛、高度自動駕駛以及完全自動駕駛共5個等級;- 國際自動機工程師學會(
SAE-International)發布的SAE J3016標準提出了0-5級分類法,將汽車駕駛自動化分為從無駕駛自動化(0級)直至完全駕駛自動化(5級)在內的6個等級;- 國際標準化組織(
ISO)與SAE組成國際標準聯合起草組,正在制定ISO 22736《道路機動車輛駕駛自動化系統相關術語的分級和定義》并已完成FDIS投票,有望于2021年內發布;- 聯合國世界車輛法規協調論壇(
UN/WP.29)于2019年專門就駕駛自動化分級的法規制定原則展開討論,確定了區分駕駛輔助和自動駕駛制定相關國際技術法規的方案。其中,SAE J3016是國際上影響最大、應用最廣泛的分級標準,截至目前已發布4個版本:- 2014版,首次提出0-5級分類框架和原則
- 2016版,主要增加設計運行范圍(ODD)定義并具體說明動態駕駛任務(DDT)等內容
- 2018版和2021版,主要完善術語描述并對標準使用中的常見問題進行解釋說明。
SAE J3016有關駕駛自動化分級的概念一經提出便引起各方關注,被包括我國在內的全球汽車產業廣泛應用。
- 然而,由于
SAE J3016基于國外技術及產業實踐制定,造成了我國汽車行業對于分級的理解不準確、定義不統一、應用不規范,在一些文件中使用的分級概念甚至與其參考標準的制定初衷存在較大差異,給政府行業管理、企業產品開發及宣傳、消費者認知及使用等帶來不便。- 在政策和市場的雙擎牽引下,我國汽車駕駛自動化技術發展迅速,產業模式正在示范應用中不斷走向成熟,企業的產品量產計劃全面提上日程,亟需制定我國自主的汽車駕駛自動化分級標準。
- 2017年,由工業和信息化部提出,汽標委【智能網聯汽車分標委】組織行業骨干單位啟動了該標準的研制工作。
0.3 制定情況及過程
- 標準任務下達后,在工業和信息化部指導下,汽標委智能網聯汽車分標委統籌開展國內外技術產業情況調查,充分調動行業資源開展分級規則研究,廣泛聽取行業意見,充分借鑒國際相關經驗,順利完成標準的預研、立項、審查及報批等工作,最終經工業和信息化部審核公示、國家市場監管總局批準發布。標準的制定主要遵循兩方面原則:
- 一,發揮企業主體作用,廣泛聽取社會意見。
本標準由重慶長安汽車股份有限公司和中國汽車技術研究中心有限公司聯合牽頭,組織整車制造、系統部件開發及檢測認證機構等智能網聯汽車產業各相關方成立核心起草組,共同開展標準研究制定。
標準制定過程中多次組織專題研討,草案形成后以公開和定向等多種形式面向工作組、行業企業及社會公眾征求意見,累計超過200家單位參與了標準的討論與意見反饋,處理相關意見近300條。該標準的制定客觀反映了行業實際需求,切實發揮了企業主體作用,充分聽取了社會公眾意見。
- 二,積極采用國際共識,切實結合我國國情。
在充分研究國際各類分級標準、廣泛聽取行業意見的基礎上,起草組決定參照國際普遍認可的
SAE J3016的0-5級分類框架,確保分級的基本原則與國際普遍采用標準的內容保持協調;
同時根據我國國家標準制定規則、汽車產業情況和標準實施環境,精簡描述用語、優化分級名稱、強化安全要求,提升標準的科學性和可實施性。
標準的制定過程中形成的中國方案和經驗也為相關國際標準法規的制定做出了貢獻。
0.3 主要內容
- (一)標準范圍
本標準規定了汽車駕駛自動化功能的分級。本標準適用于具備駕駛自動化功能的M類、N類汽車,其他類型車輛可參照執行。
- (二)分級原則
基于駕駛自動化系統能夠執行動態駕駛任務的程度,根據在執行動態駕駛任務中的角色分配以及有無設計運行范圍限制,將駕駛自動化分成0級至5級。
- (三)分級要素
基于以下6個要素對駕駛自動化等級進行劃分:
- 是否持續執行動態駕駛任務中的目標和事件探測與響應;
- 是否持續執行動態駕駛任務中的車輛橫向或縱向運動控制;
- 是否同時持續執行動態駕駛任務中的車輛橫向和縱向運動控制;
- 是否持續執行全部動態駕駛任務;
- 是否自動執行最小風險策略;
- 是否存在設計運行范圍限制。
- (四)級別定義
在汽車駕駛自動化的6個等級之中,0-2級為駕駛輔助,系統輔助人類執行動態駕駛任務,駕駛主體仍為駕駛員;3-5級為自動駕駛,系統在設計運行條件下代替人類執行動態駕駛任務,當功能激活時,駕駛主體是系統。各級名稱及定義如下:
- 0級駕駛自動化(應急輔助,emergency assistance)系統不能持續執行動態駕駛任務中的車輛橫向或縱向運動控制,但具備持續執行動態駕駛任務中的部分目標和事件探測與響應的能力。
- 1級駕駛自動化(部分駕駛輔助,partial driver assistance)系統在其設計運行條件下持續地執行動態駕駛任務中的車輛橫向或縱向運動控制,且具備與所執行的車輛橫向或縱向運動控制相適應的部分目標和事件探測與響應的能力。
- 2級駕駛自動化(組合駕駛輔助,combined driver assistance)系統在其設計運行條件下持續地執行動態駕駛任務中的車輛橫向和縱向運動控制,且具備與所執行的車輛橫向和縱向運動控制相適應的部分目標和事件探測與響應的能力。
- 3級駕駛自動化(有條件自動駕駛,conditionally automated driving)系統在其設計運行條件下持續地執行全部動態駕駛任務。
- 4級駕駛自動化(高度自動駕駛,highly automated driving)系統在其設計運行條件下持續地執行全部動態駕駛任務并自動執行最小風險策略。
- 5級駕駛自動化(完全自動駕駛,fully automated driving)系統在任何可行駛條件下持續地執行全部動態駕駛任務并自動執行最小風險策略。
0.4 重要內容釋義
1. 從服務“人類”的角度對駕駛自動化分級進行界定。
SAE J3016為便于描述人和系統在不同駕駛自動化級別中的動態駕駛任務及責任關系,不僅界定了系統需要承擔的動態駕駛任務,也對人類需要承擔的任務和責任做了相應規定。
本標準以汽車及其駕駛自動化系統為標準化對象,不適合照搬SAE J3016在對汽車及駕駛自動化系統的功能、任務界定的同時也對人提出相應要求的模式。
因此,本標準在界定駕駛自動化級別時,只將系統需要承擔的動態駕駛任務和責任納入規范性要素予以規定,并與此對應將“人和系統的責任劃分”以及“對人的要求”的相關內容均轉化為注和資料性附錄,保證了標準支撐專業技術開發及應用的規范性,又為消費者等非專業技術人員理解本標準提供了幫助。
2. “駕駛自動化”與“自動駕駛”是兩個不同的概念。
- 與
SAE J3016類似,本標準規定的是駕駛自動化分級,即根據駕駛自動化系統所能執行的駕駛任務情況,將駕駛自動化功能分為不同的等級。
- 其中,
0-2級統稱為“駕駛輔助(Driving Assistance)”,屬于低級別的駕駛自動化功能;3-5級統稱為“自動駕駛(Automated Driving)”,屬于高級別的駕駛自動化功能。因此,可以認為“自動駕駛”對駕駛自動化分級結果的描述,是對高級別(3-5級)駕駛自動化功能的統稱。
3. 駕駛自動化“功能”不等同于駕駛自動化“能力”。
- 本標準的主要定位是對汽車駕駛自動化功能進行分級,對不同級別的駕駛自動化系統需要承擔的駕駛任務進行界定,但不能用于評價駕駛自動化能力和水平。
- 汽車駕駛自動化系統的能力評價需要綜合考慮駕駛自動化功能級別和對應的設計運行條件兩個因素,單獨采用其中任何一個因素評價駕駛自動化能力都是不合適的。
- 因此,不能簡單的認為駕駛自動化級別高的系統就一定比級別低的系統能力強,而是要將系統對應的設計運行條件考慮在內,在相同功能級別前提下比較設計運行條件大小或在相同設計運行條件前提下比較功能級別才有實際價值。
- 否則,脫離設計運行條件,單純強調駕駛自動化級別缺乏科學性,也是沒有意義的。
4. 駕駛自動化等級命名更符合我國實際、更直白易懂。
- 一是,將0級命名為“應急輔助”并要求其至少有目標或事件探測能力,可兼具非持續性控制。
SAE J3016在駕駛自動化分級中納入“無自動化”并定義為0級,存在邏輯上的爭議;
同時,其納入0級范疇的前方碰撞預警(FCW)、自動緊急制動(AEB)、車道偏離預警(LDW)等均具有一定“自動化”屬性且多應用于安全應急場景。
本標準將上述功能納入0級并命名為“應急輔助”,既符合技術實際,又解決了分級邏輯上的爭議問題。
- 二是,將2級命名由“部分駕駛自動化”修改規范為“組合駕駛輔助”。
SAE J3016將2級命名為“部分駕駛自動化”,但劃歸“駕駛輔助”范疇,容易造成理解和認知上的混淆。
本標準從級別名稱上就明確強調2級駕駛自動化屬于“駕駛輔助”范疇,劃清與自動駕駛的界限,避免產生誤解與誤用,同時,準確對應了2級駕駛自動化功能兼具橫縱向組合控制的特征。
三是,提出設計運行條件(ODC)的概念,將設計運行范圍(ODD)、駕乘人員狀態和車輛狀態統一納入駕駛自動化系統激活和運行的綜合條件描述,更符合技術邏輯和產品設計實際。
5. 在各駕駛自動化等級中突出強化安全理念和要求。
- 針對國內外發生的駕駛自動化相關交通事故,本標準在各駕駛自動化級別中相應強化了安全性因素。
例如,針對3級駕駛自動化系統提出“適時采取減緩車輛風險的措施”的技術要求。
在這種情況下,即使需要依賴駕駛員進行接管的3級駕駛自動化系統,在設計時也應考慮風險減緩措施,從而最大程度的保障車輛運行的安全性。
我國標準關注駕駛自動化安全性的理念和原則得到國際同行的認可與重視,在2021版SAE J3016中也有所體現。
0.5 實施建議
- 《汽車駕駛自動化分級》為推薦性國家標準,推薦標準實施過程中的各相關方按需使用。
政府相關主管部門、標準化機構、行業企業和消費者是本標準的實施主體,建議按照如下原則開展實施工作:
-
- 政府主管部門以本標準為支撐,明確汽車駕駛自動化功能、系統或車輛的監管對象,精準實施監管政策,推動相關法律法規制修訂,完善標準體系構建,有效規范汽車駕駛自動化技術發展。
-
- 標準化機構以本標準為框架,優化完善智能網聯汽車標準體系,加快推動關鍵標準制定,適時開展標準宣貫,并根據發展需求及時修訂完善,增強對于產業實際的匹配度,為支撐主管部門管理、促進行業發展、參與國際協調奠定堅實基礎。
-
- 行業企業積極落實標準實施義務,主動采用本標準,切實遵循標準要求分類、分級開發產品,積累應用實踐經驗,嚴格規范產品宣傳,避免在駕駛自動化等級或能力方面誘導、夸大或不實宣傳,建立駕駛員/用戶信息告知及應用培訓體系,幫助消費者正確理解、使用相關功能和服務。
-
- 消費者在該標準的指導下,充分理解各級別的內涵,尤其是要正確識別駕駛自動化系統駕駛任務轉移過程及可能存在的風險,并合法依規使用駕駛自動化系統,嚴格按照系統的設計運行條件及使用要求進行操作,避免對于功能的誤用和濫用,為自己的生命、財產安全負責。
《汽車駕駛自動化分級》作為智能網聯汽車領域重要的基礎性國家標準,旨在通過技術要求框架的差異性比較對不同等級進行區分,具體技術指標要求則以其他標準另行規定,乘、商用車
AEB、LKA(0級)系統的標準已發布實施,部分駕駛輔助(1級)、組合駕駛輔助(2級)系統的標準已提交或完成立項,自動駕駛(3級及以上)系統的相關標準正在制定過程中。
分級標準的發布實施將有效支撐行業管理、助力標準體系建設、規范企業開發和宣傳、增進消費者理解及產品的市場接受度,對提升公共交通安全和促進產業規范有序發展具有重要意義。
0.6 基本信息
- 國家標準全文公開系統 URL
- 中文標準名稱:汽車駕駛自動化分級
- 英文標準名稱:Taxonomy of driving automation for vehicles
- 標準狀態:現行
- 實施日期:2022-03-01
- 發布日期:2021-08-20
- 發布機構
- 國家市場監督管理總局
- 中國國家標準化管理委員會
- 主管部門 / 提出機構:工業和信息化部
- 歸口機構:工業和信息化部 / 全國汽車標準化技術委員會(SAC/TC 114)
- 依據文檔:
- GB/T 1.1-2009 / 標準化工作導則
- SAE J3016 / 駕駛自動化分級
- ...
- 起草單位
- 重慶長安汽車股份有限公司
- 中國汽車技術研究中心有限公司
- 廣州汽車集團股 份有限公司
- 浙江吉利汽車研究院有限公司
- 東風汽車集團有限公司
- 寶馬(中國)服務有限公司
- 東風商 用車有限公司
- 浙江亞太機電股份有限公司
- 大眾汽車(中國)投資有限公司
- 東軟睿馳汽車技術(沈陽) 有限公司
- 福特汽車(中國)有限公司
- 主要起草人:
- 梁鋒華、王兆、陳達興、孫航、黃亮、霍克、陳文波、張行、吳坷、夏露、蔣學鋒、張飛燕、 陳波雷、劉威、向小麗。
0.7 總體目錄
- 1 范圍
- 2 術語和定義
- 3 駕駛自動化分級
- 3.1 駕駛自動化分級原則
- 3.2 駕駛自動化等級劃分要素
- 3.3 駕駛自動化等級劃分
- 3.3.1
0級駕駛自動化- 3.3.2
1級駕駛自動化- 3.3.3
2級駕駛自動化- 3.3.4
3級駕駛自動化- 3.3.5
4級駕駛自動化- 3.3.6
5級駕駛自動化

1 范圍
- 本標準規定了汽車駕駛自動化功能的分級。
- 本標準適用于具備駕駛自動化功能的 M類、N 類汽車,其他類型車輛可參照執行。
2 術語和定義
- 下列術語和定義適用于本文件
2.1 駕駛自動化 driving automation
車輛以 自動的方式持續地執行部分或全部動態駕駛任務的行為。
2.2 駕駛自動化系統 driving automation system
由實現駕駛自動化的硬件和軟件所共同組成的系統。
2.3 駕駛自動化功能 driving automation feature
駕駛自動化系統在特定的設計運行條件內執行部分或全部動態駕駛任務的能力。
注:一個駕駛自動化系統可實現一個或多個駕駛自動化功能,每個功能與具體的駕駛 自動化等級和設計運行條件 關聯。 為了準確描述駕駛自動化系統的能力,需要同時明確其駕駛自動化等級和設計運行條件。
2.4 動態駕駛任務 dynamic driving task / DDT
- 除策略性功能外的車輛駕駛所需的感知、決策和執行等行為,包括但不限于:
——車輛橫向運動控制;
——車輛縱向運動控制;
——目標和事件探測與響應;
——駕駛決策;
——車輛照明及信號裝置控制。
注 1 :策略性功能如導航、行程規劃、目 的地和路徑的選擇等。
注 2:動態駕駛任務一般由駕駛員、駕駛自動化系統或由兩者共同完成。
2.5 車輛橫向運動控制 lateral vehicle motion control
- 動態駕駛任務中沿著 Y 軸(如圖 1 所示)的實時車輛運動控制。
2.6 車輛縱向運動控制 longitudinalvehiclemotioncontrol
- 動態駕駛任務中沿著 X 軸(如圖 1 所示)的實時車輛運動控制。
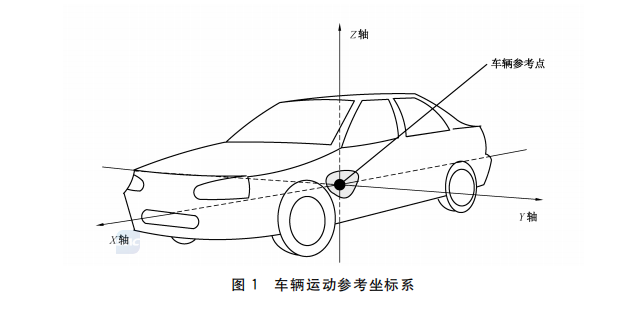
圖1 車輛運動參考坐標系
2.7 目標和事件探測與響應 object and event detection and response / OEDR
對目標和事件進行探測,并進行適當的響應。
2.8 最小風險狀態 minimal risk condition / MRC
車輛事故風險可接受的狀態。
2.9 最小風險策略 minimal risk maneuver / MRM
駕駛自動化系統無法繼續執行動態駕駛任務時,所采取的使車輛達到最小風險狀態的措施。
2.10 動態駕駛任務后援 dynamic driving task fallback
當發生即將超出設計運行范圍、駕駛自動化系統失效或車輛其他系統失效等不滿足設計運行條件 的情況時,由用戶接管或由駕駛自動化系統執行最小風險策略的后備支援行為。
2.11 設計運行范圍 operationaldesigndomain / ODD
駕駛自動化系統設計時確定的適用于其功能運行的外部環境條件。
注:典型的外部環境條件有道路、交通、天氣、光照等。
2.12 設計運行條件 operational design condition / ODC
駕駛自動化系統設計時確定的適用于其功能運行的各類條件的總稱,包括設計運行范圍、車輛狀 態、駕乘人員狀態及其他必要條件。
2.13 介入請求 request to intervene
駕駛自動化系統請求動態駕駛任務后援用戶執行接管的通知。
2.14 接管 takeover
動態駕駛任務后援用戶響應介入請求,從駕駛自動化系統獲得車輛駕駛權的行為。
2.15 駕駛自動化系統失效 driving automation system failure
駕駛自動化系統發生故障導致其無法可靠地執行部分或全部動態駕駛任務。
示例:傳感器故障等。
2.16 車輛其他系統失效 other vehicle system failure
- 駕駛自動化系統之外的車輛其他系統發生故障導致駕駛自動化系統無法可靠地執行部分或全部動 態駕駛任務。
示例:制動鉗失效等。
2.17 用戶 user
- 與駕駛自動化相關的人類角色的統稱。
注:用戶的角色可以在特定的條件下進行轉換。
2.17.1 駕駛員 driver
對于某個具體的車輛,實時執行部分或全部動態駕駛任務和/或接管的用戶。
2.17.1.1 傳統駕駛員 conventional driver
- 坐在駕駛座位上,以人工方式直接操作車輛制動、加速、轉向和換擋等操縱裝置對車輛進行控制的 駕駛員。
2.17.1.2 遠程駕駛員 remote driver
- 不在可以手動直接操作車輛制動、加速、轉向和換擋等操縱裝置的駕駛座位上,仍可以實時操縱車 輛的駕駛員。
注:遠程駕駛員可以是車內的用戶、車輛在其視野范圍內的用戶或車輛在其視野范圍外的用戶。
2.17.2 乘客 passenger
- 在車內,但不承擔任何動態駕駛任務和接管的用戶。
2.17.3 動態駕駛任務后援用戶 DDT fallback-ready user
- 當 3 級駕駛自動化系統工作時,可以識別駕駛自動化系統發出的介入請求和明顯的動態駕駛任務 相關的車輛故障,并執行接管的用戶。
注 1 :該術語適用于 3 級駕駛自動化功能,4 級和 5 級沒有這個角色。 動態駕駛任務后援用戶可以在車內或車外。
注 2:動態駕駛任務后援用戶在執行部分或全部動態駕駛任務時成為駕駛員。
2.17.4 調度員 dispatcher
- 在車輛無駕駛員操作的條件下,通過激活駕駛自動化系統以實現車輛調度服務但不執行動態駕駛 任務的用戶。
注:具備 4 級和 5 級駕駛自動化功能,且其設計運行范圍覆蓋整個行程的車輛才可被調度。 如果駕駛 自動化系統 未規劃線路,調度員還需要指定 目 的地。
3 駕駛自動化分級
3.1 駕駛自動化分級原則
- 基于駕駛自動化系統能夠執行動態駕駛任務的程度,根據在執行動態駕駛任務中的角色分配以及有無設計運行范圍限制,將駕駛自動化分成 0 級至 5 級 。駕駛自動化等級與劃分要素的關系見附錄 A 。 用戶與駕駛自動化系統的角色見附錄 B 。
3.2 駕駛自動化等級劃分要素
- 基于以下 6 個要素對駕駛自動化等級進行劃分:
— 駕駛自動化系統是否持續執行動態駕駛任務中的 目標和事件探測與響應;
— 駕駛自動化系統是否持續執行動態駕駛任務中的車輛橫向或縱向運動控制;
— 駕駛自動化系統是否同時持續執行動態駕駛任務中的車輛橫向和縱向運動控制;
— 駕駛自動化系統是否持續執行全部動態駕駛任務;
— 駕駛自動化系統是否自動執行最小風險策略;
— 駕駛自動化系統是否存在設計運行范圍限制。
3.3 駕駛自動化等級劃分
3.3.1 0 級駕駛自動化
- 0 級駕駛自動化(應急輔助,emergency assistance)系統不能持續執行動態駕駛任務中的車輛橫向或縱向運動控制,但具備持續執行動態駕駛任務中的部分目標和事件探測與響應的能力。
注 1 : 0 級駕駛自動化不是無駕駛自動化,0 級駕駛自動化系統可感知環境,并提供提示信息或短暫介入車輛控制 以輔助駕駛員避險(如車道偏離預警、前向碰撞預警、自動緊急制動、車道偏離抑制等緊急情況下提供的輔助 功能)。
注 2:不具備目標和事件探測與響應能力的功能(如定速巡航、電子穩定性控制等)不在駕駛自動化功能的范圍內。
3.3.2 1 級駕駛自動化
- 1 級駕駛自動化(部分駕駛輔助,partial driver assistance)系統在其設計運行條件下持續地執行動態駕駛任務中的車輛橫向或縱向運動控制,且具備與所執行的車輛橫向或縱向運動控制相適應的部分 目標和事件探測與響應的能力。
注:對于 1 級駕駛自動化,駕駛員和駕駛自動化系統共同執行全部動態駕駛任務,并監管駕駛自動化系統的行為和 執行適當的響應或操作(如車道居中控制、自適應巡航控制等功能)。
3.3.3 2 級駕駛自動化
- 2 級駕駛自動化(組合駕駛輔助,combined driver assistance)系統在其設計運行條件下持續地執行動態駕駛任務中的車輛橫向和縱向運動控制,且具備與所執行的車輛橫向和縱向運動控制相適應的部 分目標和事件探測與響應的能力。
注:對于 2 級駕駛自動化,駕駛員和駕駛自動化系統共同執行全部動態駕駛任務,并監管駕駛自動化系統的行為和 執行適當的響應或操作。
3.3.4 3 級駕駛自動化
- 3 級駕駛自動化(有條件自動駕駛,conditionally automated driving)系統在其設計運行條件下持續地執行全部動態駕駛任務。
注:對于 3 級駕駛自動化,動態駕駛任務后援用戶以適當的方式執行接管。
3.3.5 4 級駕駛自動化
- 4 級駕駛自動化(高度自動駕駛,highly automated driving)系統在其設計運行條件下持續地執行全部動態駕駛任務并自動執行最小風險策略。
注 1 :對于 4 級駕駛自動化,系統發出介入請求時,用戶可不作響應,系統具備自動達到最小風險狀態的能力。
注 2:某些具備 4 級駕駛自動化系統的車輛無人工駕駛功能,如園區接駁車等。
3.3.6 5 級駕駛自動化
- 5 級駕駛自動化(完全自動駕駛,fully automated driving)系統在任何可行駛條件下持續地執行全部動態駕駛任務并自動執行最小風險策略。
注 1 :對于 5 級駕駛自動化,系統發出介入請求時,用戶可不作響應,系統具備自動達到最小風險狀態的能力。
注 2 : 5 級駕駛自動化在車輛可行駛環境下沒有設計運行范圍的限制(商業和法規因素等限制除外)。
3.4 駕駛自動化各等級技術要求
3.4.1 0 級駕駛自動化
- 0 級駕駛自動化系統應滿足以下要求:
a) 具備持續執行部分目標和事件探測與響應的能力;
b) 當駕駛員請求駕駛自動化系統退出時,立即解除系統控制權。
注 :當車道偏離抑制系統工作時,駕駛員可以主動控制方向盤使車道偏離抑制系統退出。
3.4.2 1 級駕駛自動化
- 1 級駕駛自動化系統應滿足以下要求:
a) 持續地執行動態駕駛任務中的車輛橫向或縱向運動控制;
b) 具備與車輛橫向或縱向運動控制相適應的部分目標和事件探測與響應的能力;
c) 當駕駛員請求駕駛自動化系統退出時,立即解除系統控制權。
3.4.3 2 級駕駛自動化
- 2 級駕駛自動化系統應滿足以下要求:
a) 持續地執行動態駕駛任務中的車輛橫向和縱向運動控制;
b) 具備與車輛橫向和縱向運動控制相適應的部分目標和事件探測與響應的能力;
c) 當駕駛員請求駕駛自動化系統退出時,立即解除系統控制權。
3.4.4 3 級駕駛自動化
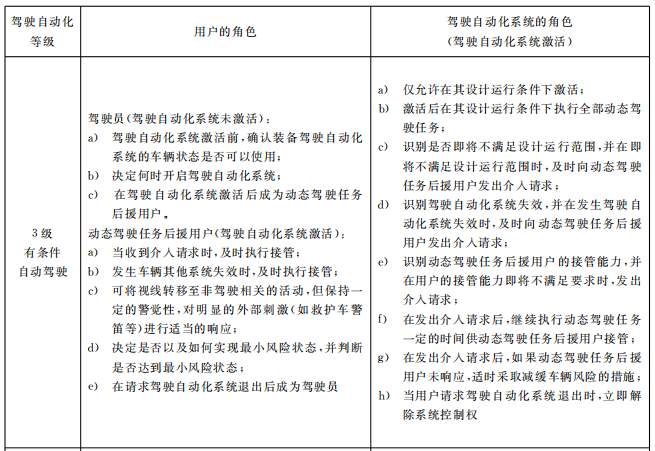
- 3 級駕駛自動化系統應滿足以下要求:
a) 僅允許在其設計運行條件下激活;
b) 激活后在其設計運行條件下執行全部動態駕駛任務;
c) 識別是否即將不滿足設計運行范圍,并在即將不滿足設計運行范圍時,及時向動態駕駛任務后 援用戶發出介入請求;
d) 識別駕駛自動化系統失效,并在發生駕駛自動化系統失效時,及時向動態駕駛任務后援用戶發 出介入請求;
e) 識別動態駕駛任務后援用戶的接管能力,并在其接管能力即將不滿足要求時,發出介入請求;
f) 在發出介入請求后,繼續執行動態駕駛任務一定的時間供動態駕駛任務后援用戶執行接管 操作;
g) 在發出介入請求后,如果動態駕駛任務后援用戶未響應,適時采取減緩車輛風險的措施;
h) 當用戶請求駕駛自動化系統退出時,立即解除系統控制權。
3.4.5 4 級駕駛自動化
- 4 級駕駛自動化系統應滿足以下要求:
a) 僅允許在其設計運行條件下激活。
b) 激活后在其設計運行條件下執行全部動態駕駛任務。
c) 識別是否即將不滿足其設計運行范圍。
d) 識別駕駛自動化系統失效和車輛其他系統失效。
e) 識別駕乘人員狀態是否符合其設計運行條件(如有)。
f) 在發生下列情況之一且用戶未響應介入請求時,自動執行最小風險策略:
——即將不滿足其設計運行范圍;
——駕駛自動化系統失效或車輛其他系統失效;
——駕乘人員狀態不符合其設計運行條件;
——用戶要求實現最小風險狀態。
g) 除下列情形以外,不得解除系統控制權:
——已達到最小風險狀態;
——駕駛員在執行動態駕駛任務。
h) 當用戶請求駕駛自動化系統退出時,解除系統控制權,如果存在安全風險可暫緩解除。
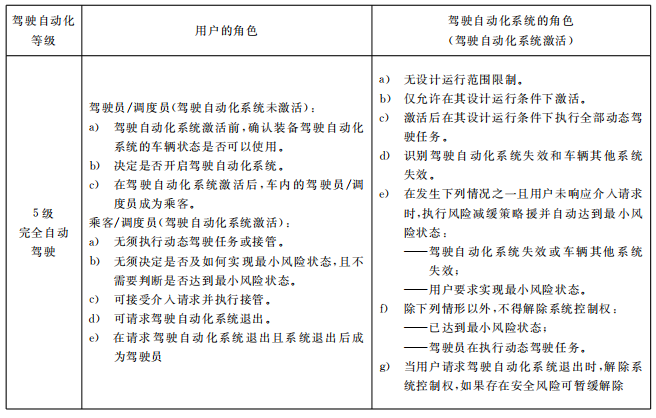
3.4.6 5 級駕駛自動化
- 5 級駕駛自動化系統應滿足以下要求:
a ) 無設計運行范圍限制。
b) 僅允許在其設計運行條件下激活。
c) 激活后在其設計運行條件下執行全部動態駕駛任務。
d) 識別駕駛自動化系統失效和車輛其他系統失效。
e) 在發生下列情形之一且用戶未響應介入請求時,自動執行最小風險策略:
——駕駛自動化系統失效或車輛其他系統失效;
——用戶要求實現最小風險狀態。
f) 除下列情形以外,不得解除系統控制權:
——已達到最小風險狀態;
——駕駛員在執行動態駕駛任務。
g) 當用戶請求駕駛自動化系統退出時,解除系統控制權,如果存在安全風險可暫緩解除。
附錄 A (資料性附錄)駕駛自動化等級與劃分要素的關系
表 A. 1 給出了駕駛自動化等級與劃分要素的關系
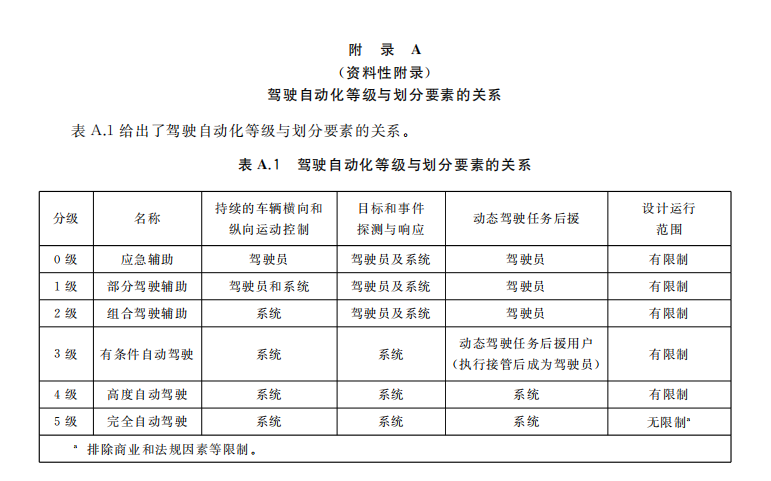
- 表 A.1 駕駛自動化等級與劃分要素的關系
| 分級 | 名稱 | 持續的車輛橫向和 縱向運動控制 | 目標和事件探測與響應 | 動態駕駛任務后援 | 設計運行范圍 |
|---|---|---|---|---|---|
| 0 級 | 應急輔助 | 駕駛員 | 駕駛員及系統 | 駕駛員 | 有限制 |
| 1 級 | 部分駕駛輔助 | 駕駛員和系統 | 駕駛員及系統 | 駕駛員 | 有限制 |
| 2 級 | 組合駕駛輔助 | 系統 | 駕駛員及系統 | 駕駛員 | 有限制 |
| 3 級 | 有條件自動駕駛 | 系統 | 系統 | 動態駕駛任務后援用戶(執行接管后成為駕駛員) | 有限制 |
| 4 級 | 高度 自動駕駛 | 系統 | 系統 | 系統 | 有限制 |
| 5 級 | 完全自動駕駛 | 系統 | 系統 | 系統 | 無限制a |
| a 排除商業和法規因素等限制。 |
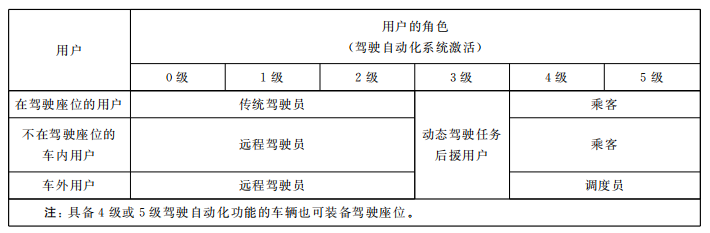
附錄 B (資料性附錄) 用戶與駕駛自動化系統的角色
表B.1 給出了不同等級的駕駛自動化系統激活后用戶擔任的角色。
- 表B.1 駕駛自動化系統激活后用戶的角色
表B.2 給出了在不同的駕駛自動化等級中,用戶和駕駛自動化系統在執行動態駕駛任務和動態駕 駛任務后援中的角色。
- 表B.2 用戶與駕駛自動化系統的角色


Z 關鍵組織
- 工業和信息化部
- 全國汽車標準化技術委員
Y 推薦文獻
- GB/T 40429-2021《汽車駕駛自動化分級》 正式發布 - 全國汽車標準化技術委員會 2021.9.17
- Taxonomy and Definitions for Terms Related to Driving Automation Systems for On-Road Motor Vehicles / J3016_202104 - SAE
- SAE J3016:駕駛自動化分級(2021年4月,中文版) - 面包板 2021.5.27
2021年5月3日,SAE International與國際標準化組織(ISO)共同宣布了對J3016_201806的更新,更新后的版本為J3016_202104。
X 參考文獻

本文鏈接: http://www.rzrgm.cn/johnnyzen
關于博文:評論和私信會在第一時間回復,或直接私信我。
版權聲明:本博客所有文章除特別聲明外,均采用 BY-NC-SA 許可協議。轉載請注明出處!
日常交流:大數據與軟件開發-QQ交流群: 774386015 【入群二維碼】參見左下角。您的支持、鼓勵是博主技術寫作的重要動力!

 浙公網安備 33010602011771號
浙公網安備 33010602011771號