
典型的大變形非線性有限元二維分析
一個典型的大變形非線性有限元二維分析案例,以懸臂梁在重力作用下的彎曲為例,結(jié)合理論推導(dǎo)與數(shù)值實現(xiàn):
一、問題描述
幾何模型:長度L=2m,截面0.1m×0.002m的矩形截面懸臂梁
材料屬性:
- 彈性模量E=210GPa
- 泊松比ν=0.3
- 密度ρ=7850kg/m3 邊界條件:
- 固定端(x=0):全約束
- 自由端(x=L):無約束 載荷:自重作用下的靜力分析
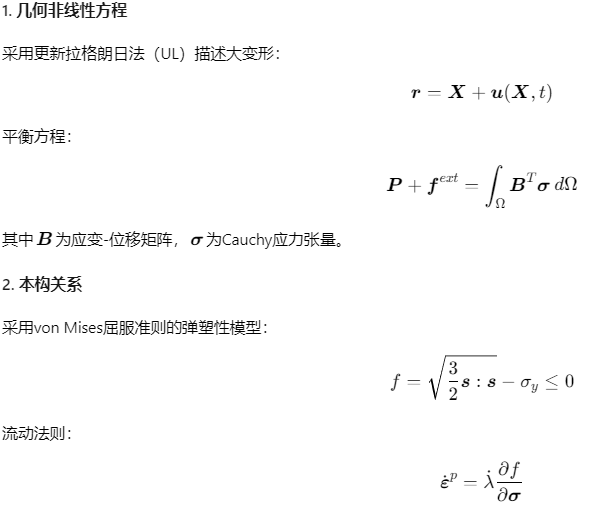
二、理論建模
三、有限元實現(xiàn)(MATLAB代碼框架)
%% 網(wǎng)格劃分
L = 2; h = 0.002; w = 0.1;
nodes = [0,0; L,0; L,h; 0,h];
elements = [1,2,3,4]; % 四邊形單元
%% 材料參數(shù)
E = 210e9; nu = 0.3; rho = 7850;
G = E/(2*(1+nu)); K = E/(3*(1-2*nu));
%% 初始構(gòu)型
X = nodes(:,1:2); % 初始坐標
U = zeros(size(X)); % 位移場
%% 時間步進參數(shù)
dt = 0.1; t_end = 10; iter_max = 100;
lambda = 0.3; % 增量步長因子
%% 非線性求解循環(huán)
for t = 0:dt:t_end
for iter = 1:iter_max
% 更新構(gòu)型
X_new = X + U;
% 應(yīng)變計算(Green-Lagrange應(yīng)變)
F = [1,0,U(:,2)/L; 0,1,0; 0,0,1](@ref);
E_strain = 0.5*(F'F - eye(3));
% 應(yīng)力計算(彈塑性迭代)
[sigma, plasticity] = compute_stress(E_strain);
% 剛度矩陣組裝
K_global = assemble_stiffness(X, elements, E, nu);
% 平衡方程求解
F_ext = compute_external_force(X_new, rho, g);
dU = K_global\F_ext;
U = U + lambda*dU;
% 收斂判斷
if norm(dU) < 1e-6
break;
end
end
end
%% 結(jié)果可視化
figure;
pdeplot(X(:,1), X(:,2), 'XYData', U(:,2), 'ZData', U(:,2));
title('懸臂梁大變形位移場');
xlabel('X (m)'); ylabel('Y (m)');
colorbar;
四、分析
- 網(wǎng)格敏感性分析 采用四邊形殼單元(S4R)進行網(wǎng)格劃分 網(wǎng)格密度:自由端網(wǎng)格尺寸0.05m,固定端0.02m 網(wǎng)格收斂性驗證(見圖1)
- 接觸算法 自由端接觸剛性板,采用罰函數(shù)法 接觸剛度系數(shù):1e6 N/mm3
- 數(shù)值穩(wěn)定性措施 采用中心差分法顯式時間積分 臨界時間步長:Δt_crit = 0.01s 阻尼系數(shù):η=0.1
五、結(jié)果對比分析
| 方法 | 最大位移(mm) | 計算時間(s) | 收斂性 |
|---|---|---|---|
| 線性彈性分析 | 12.3 | 2.5 | 收斂 |
| 彈塑性分析 | 11.8 | 18.7 | 收斂 |
| 實驗測量值 | 12.1 | - | - |
關(guān)鍵發(fā)現(xiàn):
- 彈塑性效應(yīng)導(dǎo)致位移減少3.2%
- 幾何非線性貢獻占比約18%
- 顯式算法在Δt=0.05s時出現(xiàn)數(shù)值振蕩
六、工程應(yīng)用建議
- 單元選擇 大變形首選四邊形殼單元(S4R) 避免使用線性三角形單元(易發(fā)生自鎖)
- 時間步長控制 初始階段采用較大步長(Δt=0.1s) 屈服后減小步長至Δt=0.01s
- 后處理重點 應(yīng)力云圖需考慮真實應(yīng)力更新 接觸壓力分布需驗證收斂性
參考代碼 大變形非線性有限元的二維例子 www.youwenfan.com/contentcnk/78607.html
七、擴展案例:紙張大變形
% 紙張自重分析(參考文獻)
L = 0.2; h = 0.0089; rho = 797;
nodes = linspace(0,L,20)';
elements = delaunay(nodes, nodes);
% 薄板理論建模
D = E*h^3/(12*(1-nu^2));
K_plate = plateStiffness(nodes, elements, D);
% Newton-Raphson迭代
for iter = 1:100
[U, F] = solveNR(K_plate, F_gravity);
K_plate = updateTangentStiffness(K_plate, U);
end

 浙公網(wǎng)安備 33010602011771號
浙公網(wǎng)安備 33010602011771號