
你的DDPG/RDPG為何不收斂?
- DDPG不收斂的潛在原因分析
- RDPG不收斂的潛在原因分析(含Github上幾個不能收斂的RDPG源碼分析)
- D(R)DPG可以收斂的源碼(分Keras和pytorch兩種版本)
- 強化學習實踐(編程)過程的幾點建議
一:DDPG不收斂的潛在原因分析
先上DDPG的算法偽代碼: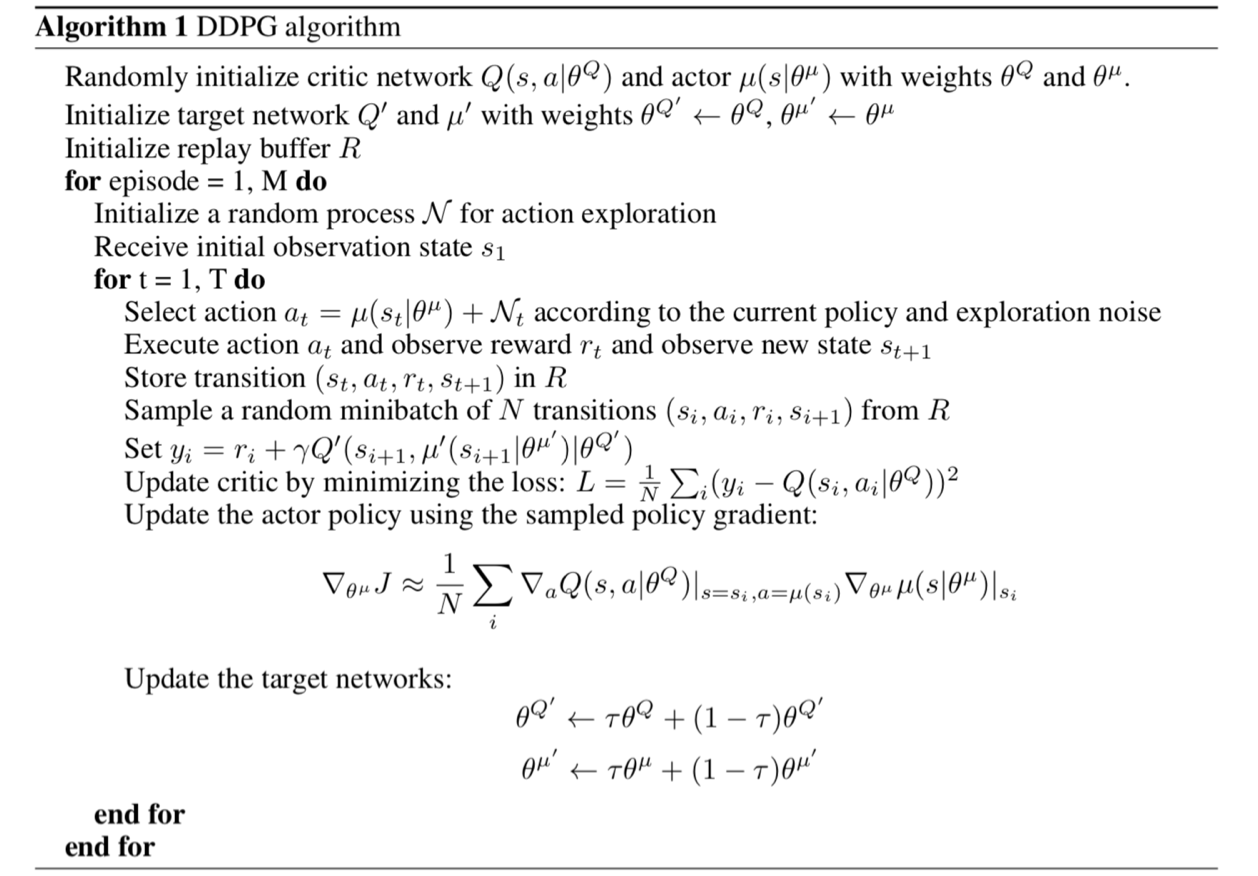
(1)在編寫Q(s, a)的過程中,錯誤的使用了layer.Add層而非layer.concatenate (keras版)或torch.cat (pytorch版)
會導致不收斂的critic代碼如下:
#程序清單1
1 from keras.layers import Add 2 #如下代碼定義了critic網絡 3 def _build_critic(self, featureDim, actionDim, learningRate=LR_C): 4 stateInputs = Input(shape = (featureDim, ), name = 'State-Input') 5 actionInput = Input(shape = (actionDim, ), name = 'Action-Input') 6 stateOut = Dense(30, activation = 'relu')(stateInputs) 7 actionOut = Dense(30, activation = 'relu')(actionInput) 8 Outputs = Add()([stateOut, actionOut]) 9 init = RandomUniform(minval = -0.003, maxval = 0.003) 10 Outputs = Dense(1, activation = 'linear', name = 'Q-Value', kernel_initializer = init)(Outputs) 11 critic = Model(inputs = [stateInputs, actionInput], outputs = Outputs)
12 return critic
不收斂原因的分析:寫代碼的時候一定要多想想Q(s, a)的本質是什么?Q(s, a)的本質是多鍵值的聯合查表,即采用s和a作為鍵值在一個表格中查表,只不過這個表格用神經網絡替代了。也就是說,作為鍵值,s和a一定要分別單獨給出,而不能加在一起然后再給神經網絡。
可以收斂的critic寫法如下(Keras版):
#程序清單2
1 from keras.layers import concatenate 2 3 def _build_critic(self, featureDim, actionDim, learningRate=LR_C): 4 5 sinput = Input(shape=(featureDim,), name='state_input') 6 ainput = Input(shape=(actionDim,), name='action_input') 7 s = Dense(40, activation='relu')(sinput) 8 a = Dense(40, activation='relu')(ainput) 9 x = concatenate([s, a]) 10 x = Dense(40, activation='relu')(x) 11 output = Dense(1, activation='linear')(x) 12 13 model = Model(inputs=[sinput, ainput], outputs=output) 14 model.compile(loss='mse', optimizer=Adam(lr=learningRate)) 15 16 return model
(2)如果采用PyTorch編寫actor神經網絡,有一點要注意(經筆者實驗,只有PyTorch有這個問題,Keras的coder可以放心的跳過這一節了)
使用PyTorch盡量不要使用Lambda層,實驗結果上來看它似乎非常影響收斂性。盡管Keras上使用Lambda層不影響收斂性。
會導致收斂過程很坎坷甚至不收斂的actor代碼如下:
#程序清單3
1 class Actor(torch.nn.Module): 2 def __init__(self, s_dim, a_dim): 3 super(Actor, self).__init__() 4 self.Layer1 = torch.nn.Linear(s_dim, 30) # Input layer 5 self.Layer2 = torch.nn.Linear(30, 30) 6 self.Layer3 = torch.nn.Linear(30, a_dim) 7 self.relu = torch.nn.ReLU() 8 self.tanh = torch.nn.Tanh() 9 10 def forward(self, s_input): 11 out = self.relu(self.Layer1(s_input)) # linear output 12 out = self.relu(self.Layer2(out)) 13 out = self.tanh(self.Layer3(out)) 14 out = Lambda(lambda x: x * 2)(out) 15 return out
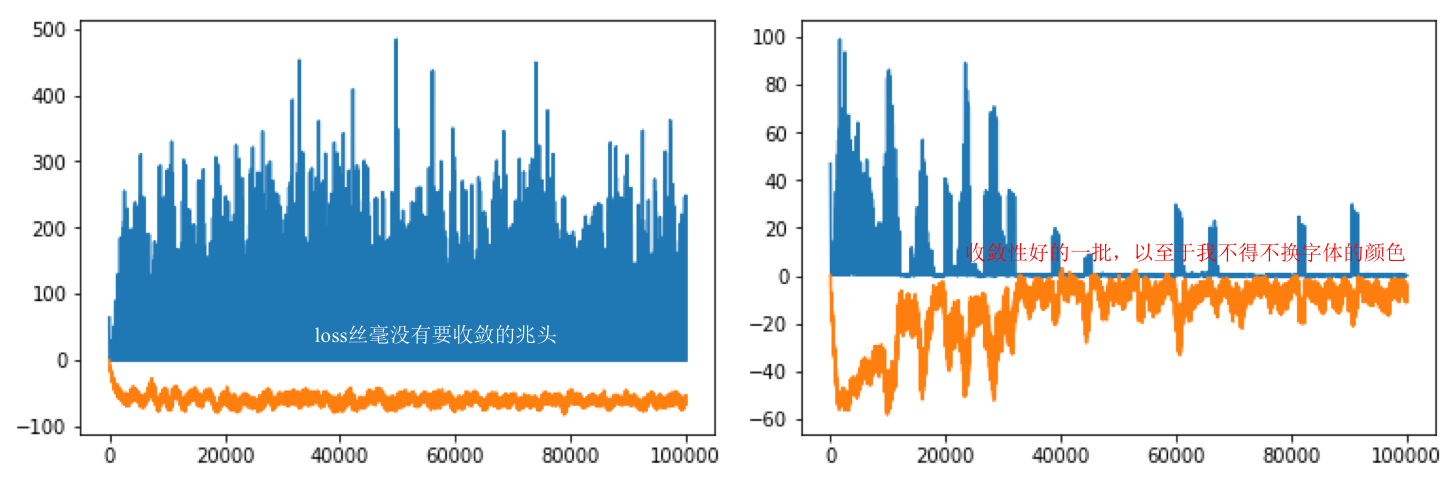
注意到程序的第14行引用了Lambda層,筆者當時解決的問題是“Pendulum-v0”,對于該問題,合法的動作空間是[-2, 2]之間的。而13行的tanh輸出在[-1, 1]之間。所以需要把13行的輸出乘以2。但是筆者發現,這種寫法收斂的過程相較不采用Lambda層而直接將out乘以2(代碼之后給出)輸出收斂的更慢,并且收斂的過程會被反復破壞然后再收斂,如下圖:

上圖的藍線表示critic_loss, 橘線表示實時動作-狀態值函數的預測輸出。可以從上圖(左)看到,在PyTorch中采用Lambda層規范動作值使得critic對動作-狀態值函數的預測難以收斂,這表示它對critic的預測帶來了負面的影響,總是不斷的破壞critic的收斂性。上圖(右)的代碼如程序清單4中所示。直接將上一層網絡的輸出乘以2而沒有使用Lambda層。可見critic的預測可以逐漸趨近于0(對于Pendulum-v0這是收斂,其他環境不趨于0),收斂性也好了很多。
可以收斂的actor寫法如下:
#程序清單4
1 class Actor(torch.nn.Module): 2 def __init__(self, s_dim, a_dim): 3 super(Actor, self).__init__() 4 5 self.l1 = torch.nn.Linear(s_dim, 40) 6 self.l2 = torch.nn.Linear(40, 30) 7 self.l3 = torch.nn.Linear(30, a_dim) 8 9 def forward(self, x): 10 x = F.relu(self.l1(x)) 11 x = F.relu(self.l2(x)) 12 x = 2 * torch.tanh(self.l3(x)) 13 return x
(3)如果采用PyTorch編寫critic神經網絡,有一點要注意(經筆者實驗,也是只有PyTorch有這個問題,Keras的coder可以放心的跳過這一節了)
在編寫Q(s, a)的時候,s和a一定要在一開始輸入神經網絡的時候就做連接操作(上文提到的concatenate)而不要讓s和a分別經過一層神經網絡后再做連接操作。否則,critic會不收斂。
會導致不收斂的critic代碼如下:
#程序清單5
1 class Critic(torch.nn.Module): 2 def __init__(self, s_dim, a_dim): 3 super(Critic, self).__init__() 4 self.Layer1_s = torch.nn.Linear(s_dim, 30) 5 self.Layer1_a = torch.nn.Linear(a_dim, 30) 6 self.Layer2 = torch.nn.Linear(30+30, 30) 7 self.Layer3 = torch.nn.Linear(30, 1) 8 self.relu = torch.nn.ReLU() 9 10 def forward(self, s_a): 11 s, a = s_a 12 out_s = self.relu(self.Layer1_s(s)) 13 out_a = self.relu(self.Layer1_a(a)) 14 out = self.relu(self.Layer2(torch.cat([out_s, out_a], dim=-1))) 15 out = self.Layer3(out) 16 return out
上圖的藍線表示critic_loss, 橘線表示實時動作-狀態值函數的預測輸出。上圖(左)是程序清單5運行的結果輸出。上圖(右)是程序清單6運行的結果輸出。
可以收斂的critic寫法如下:
#程序清單6
1 class Critic(torch.nn.Module): 2 def __init__(self, s_dim, a_dim): 3 super(Critic, self).__init__() 4 5 self.l1 = torch.nn.Linear(s_dim + a_dim, 40) 6 self.l2 = torch.nn.Linear(40 , 30) 7 self.l3 = torch.nn.Linear(30, 1) 8 9 def forward(self, x_u): 10 x, u = x_u 11 x = F.relu(self.l1(torch.cat([x, u], 1))) 12 x = F.relu(self.l2(x)) 13 x = self.l3(x) 14 return x

 浙公網安備 33010602011771號
浙公網安備 33010602011771號