
基于嵌入式無人機UAV通信系統的實時最優資源分配算法matlab仿真
1.課題概述
考慮使用UAV作為中繼輔助節點的設備到設備(D2D)無線信息和電力傳輸系統。由于無人機的能量容量和飛行時間有限,部署無人機的一個重要問題是實時應用中的能耗管理,能耗與無人機的發射功率成正比。為了解決這一重要問題,開發了一種實時資源分配算法,通過聯合優化無人機嵌入式D2D通信的能量收集時間和功率控制,最大限度地提高能源效率。
2.系統仿真結果
平均吞吐量隨 D2D 對數增加而增長,能量收集與傳輸時間長度存在權衡,體現時間優化的必要性。

3.核心程序與模型
版本:MATLAB2022a
..............................................................................
%這里設計OPA算法
for i = 1:length(D2D)%開始循環
i
for mc = 1:MTKL%開始循環
tic;
obj = [];
for it = 1:Iter%開始迭代
N = D2D(i);
%產生信道h和p
h = randn(N,N);
if it==1
p = rand(1,N);
pk = p;
tk = it;
end
delta = rand;
P0 = 0.5;
Pcir = 1.2;
thetafix = 0.125;
...................................................
end
obj(it) = sum(rn)/theta;%目標值
%更新p
pk = pnew;
tk = 1;
%每次循環之后,對其進行約束的判決
end
RT2(mc)=toc;
end
RT(i) = 1e3*mean(RT2);%秒轉換為毫秒
end
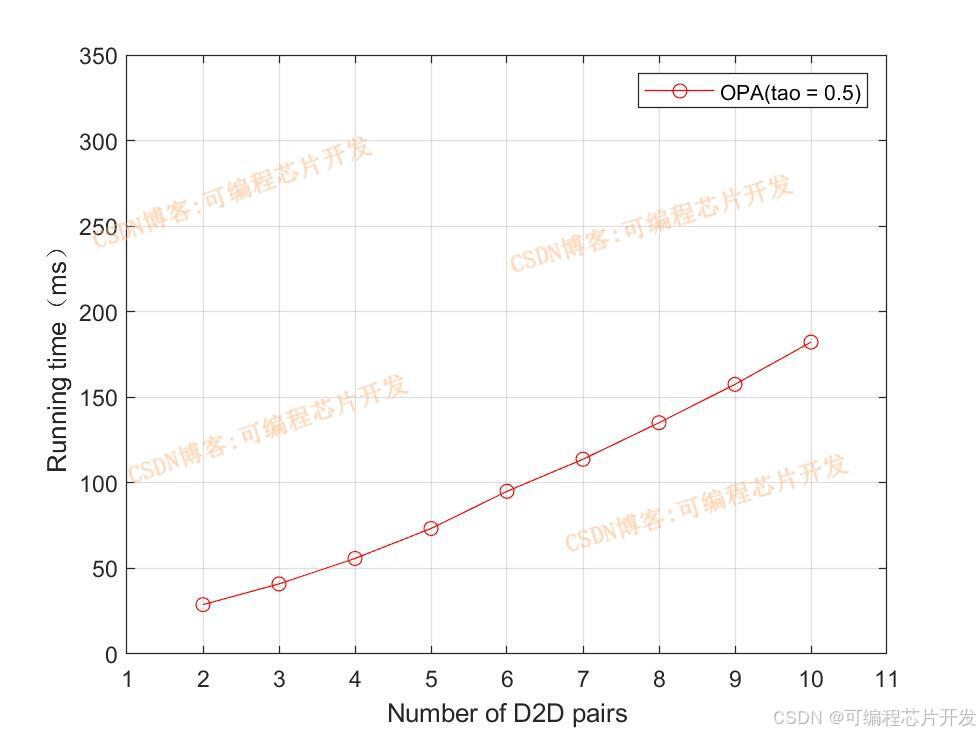
figure;%畫圖
plot(D2D,RT,'r-o');
axis([1,11,0,350]);
xlabel('Number of D2D pairs');
ylabel('Running time(ms)');
grid on
legend('OPA(tao = 0.5)');
026_014m
4.系統原理簡介
由于無人機的能量容量和飛行時間有限,部署無人機的一個重要問題是實時應用中的能耗管理,能耗與無人機的發射功率成正比。為了解決這一重要問題,開發了一種實時資源分配算法,通過聯合優化無人機嵌入式D2D通信的能量收集時間和功率控制,最大限度地提高能源效率。

算法的流程如下圖所示:
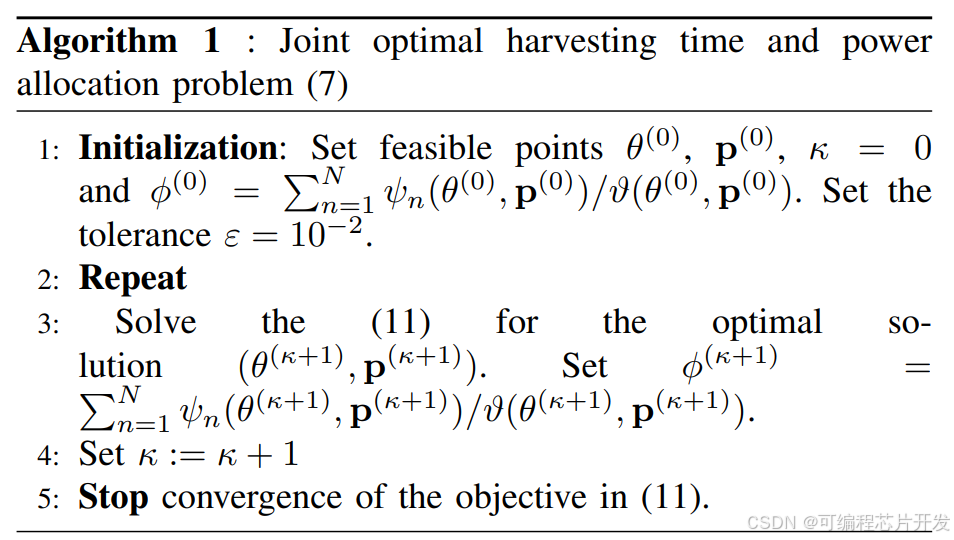
具體來講算法步驟:
1.初始化:
首先,設定能量收集時間 k 以及一個可行的初始功率解 pn′(t)。這里的 k 是預先確定的能量收集時間,而 pn′(t) 是功率的初始估計值,這個初始值需要滿足一定的條件,使得它在問題的可行域內,以保證后續的優化過程可以正常進行。
2.重復執行以下操作:
這是一個迭代過程,不斷重復步驟 3 到 5,直到滿足終止條件。
對于給定的 pn′(t),使用標準的凸優化技術求解問題 (25) 以獲得最優解 {pn?(t)}。這里假設問題 (25) 是一個凸優化問題,這意味著它具有良好的數學性質,例如局部最優解就是全局最優解,因此可以使用標準的凸優化算法(如內點法、梯度下降法等)來求解。
在求解問題 (25) 的過程中,可能涉及到一些優化目標和約束條件,例如,在給定能量收集時間 k 的情況下,根據一定的性能指標(如最小化功率消耗、最大化系統性能等)和約束條件(如功率范圍、鏈路容量等)來優化功率分配 {pn?(t)}。
更新功率解:
將得到的最優解 {pn?(t)} 更新為 pn′(t),這樣可以將本次迭代得到的結果作為下一次迭代的輸入,逐步優化功率分配。
檢查終止條件:
每次迭代后,需要檢查是否滿足某些終止條件。這些終止條件可以是多種多樣的,例如:功率解 pn′(t) 的變化小于某個預設的閾值,即前后兩次迭代得到的功率分配結果足夠接近,說明算法已經收斂,進一步迭代對結果的改進不大,可以停止。
達到最大迭代次數,防止算法陷入無限迭代而無法結束,保證算法的有限時間可終止性。
返回結果:
當滿足終止條件時,將最終的 pn′(t) 作為次優解 {pn?(t)} 返回。由于整個問題可能是非凸的,通過這種迭代求解凸子問題的方式得到的結果可能是次優的,但在實際中可以滿足一定的性能要求。

 浙公網安備 33010602011771號
浙公網安備 33010602011771號