
基于PID控制器的異步電機矢量控制系統simulink建模與仿真
1.課題概述
基于PID控制器的異步電機矢量控制系統simulink建模與仿真。
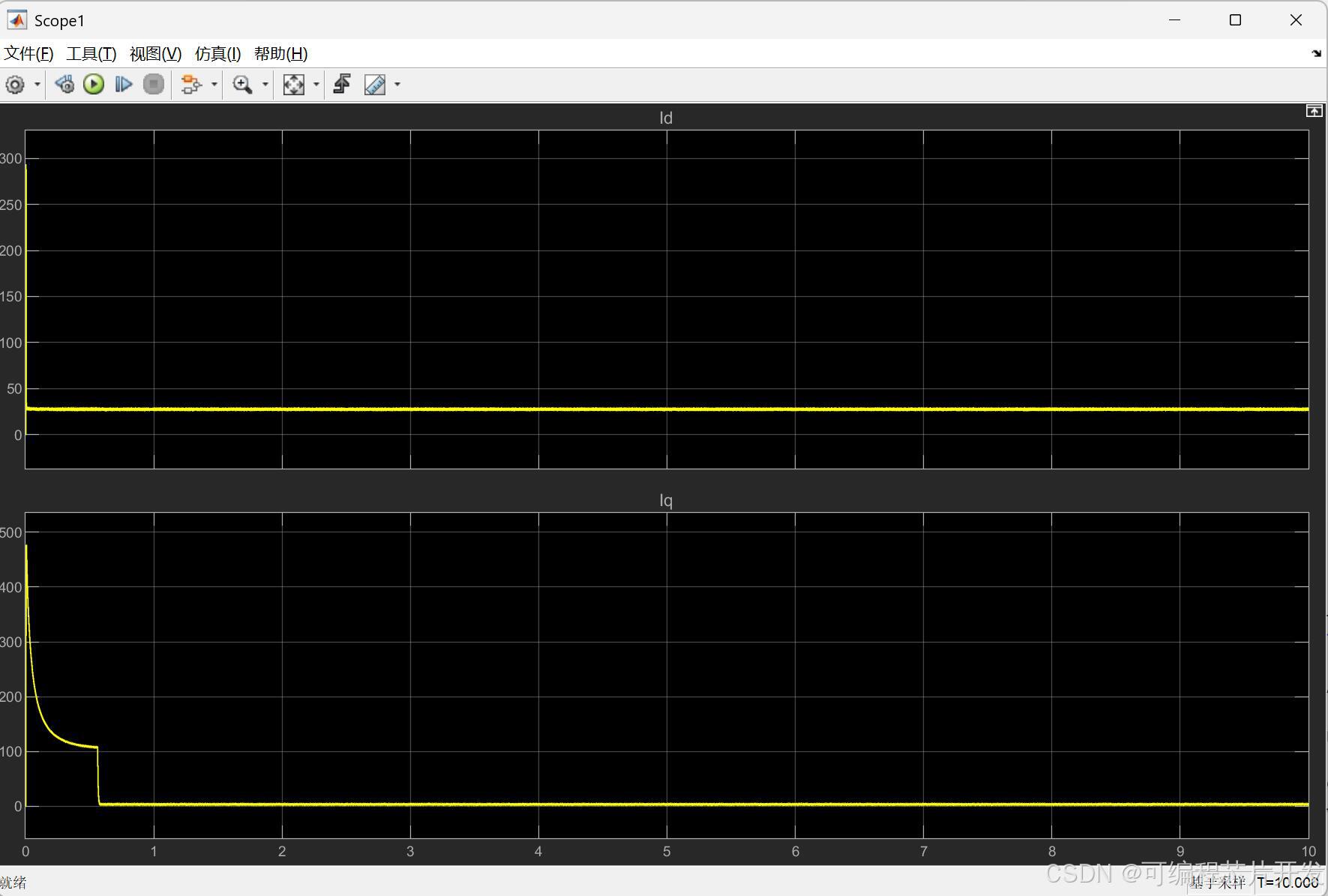
2.系統仿真結果



3.核心程序與模型
版本:MATLAB2022a

4.系統原理簡介
異步電機由于其結構簡單、堅固耐用、成本低廉等優點,在工業領域得到了廣泛應用。然而,異步電機是一個多變量、強耦合、非線性的復雜系統,其控制難度較大。矢量控制技術的出現為異步電機的高性能控制提供了有效手段,而 PID 控制器在其中起著關鍵的調節作用。通過將矢量控制與 PID 控制器相結合,可以實現異步電機的高精度調速、轉矩控制等功能,提高電機運行的穩定性和可靠性,滿足不同工業應用場景的需求。
4.1 三相異步電機的物理模型
異步電機主要由定子和轉子兩部分組成。定子上有三相繞組,分別為 A 相、B 相和 C 相,通以三相交流電后會產生旋轉磁場。轉子通常為鼠籠式或繞線式結構,在定子旋轉磁場的作用下產生感應電動勢和感應電流,進而產生電磁轉矩使轉子轉動。

4.2 矢量控制
矢量控制的核心思想是將異步電機的定子電流分解為產生磁場的勵磁電流分量和產生轉矩的轉矩電流分量,通過分別控制這兩個分量,實現對電機磁場和轉矩的獨立控制,就像直流電機的勵磁電流和電樞電流分別控制一樣,從而使異步電機獲得類似于直流電機的控制性能。
在穩態運行時,基于 PID 控制器的異步電機矢量控制系統能夠較好地跟蹤給定轉速。通過積分環節的作用,可以消除由于負載變化等因素引起的穩態轉速誤差,使電機轉速穩定在給定值附近。例如,當電機負載增加時,轉速會下降,速度環的 PID 控制器會根據轉速偏差調整轉矩電流分量,使電機輸出更大的轉矩,從而使轉速回升到給定值,保證了系統的穩態精度。

 浙公網安備 33010602011771號
浙公網安備 33010602011771號