
基于雙PI控制器和鐵損補(bǔ)償?shù)腜MSM控制系統(tǒng)simulink建模與仿真
1.課題概述
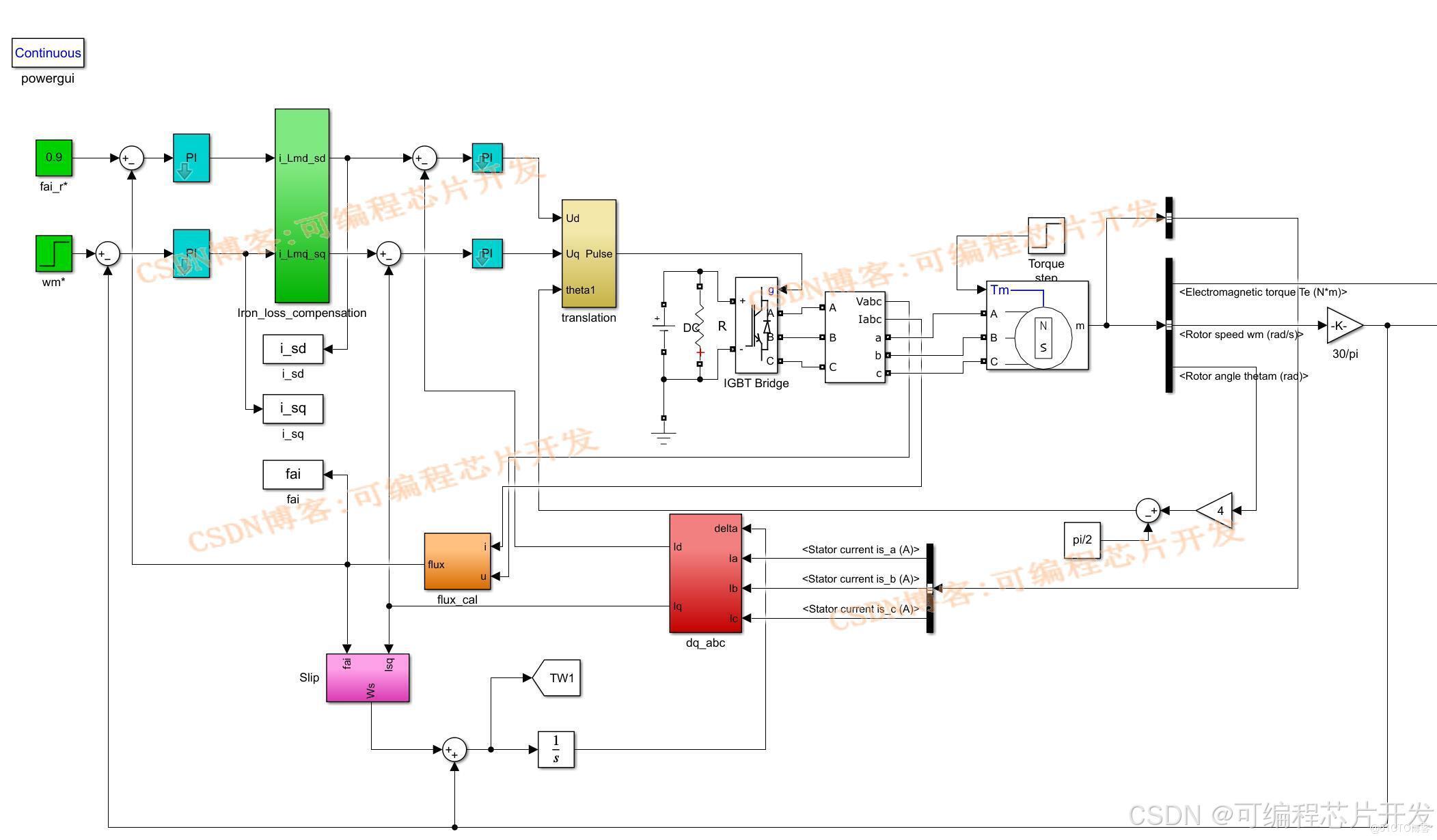
基于雙PI控制器和鐵損補(bǔ)償?shù)腜MSM控制系統(tǒng)simulink建模與仿真,模型包括PI控制器,鐵損補(bǔ)償模塊,abc2dq模塊,逆變器,電機(jī)等模塊。
2.系統(tǒng)仿真結(jié)果


3.核心程序與模型
版本:MATLAB2022a
clc;
close all;
warning off;
Ts = 1;
Value_w = we.signals.values;
time1 = Ts/length(Value_w):Ts/length(Value_w):Ts;
Value_T = Te.signals.values;
time2 = Ts/length(Value_T):Ts/length(Value_T):Ts;
Value_isd = i_sd.signals.values;
time3 = Ts/length(Value_isd):Ts/length(Value_isd):Ts;
Value_isq = i_sq.signals.values;
time4 = Ts/length(Value_isq):Ts/length(Value_isq):Ts;
Value_fai = fai.signals.values;
time5 = Ts/length(Value_fai):Ts/length(Value_fai):Ts;
figure;
subplot(321);
plot(time1,Value_w,'linewidth',1);
grid on
xlabel('t/s');
ylabel('n/r/min');
axis([0,1,0,2000]);
subplot(322);
plot(time2,Value_T,'linewidth',1);
grid on
xlabel('t/s');
ylabel('Te/N.m');
axis([0,1,10,40]);
subplot(323);
plot(time3,Value_isd,'linewidth',1);
grid on
xlabel('t/s');
ylabel('isd/A');
axis([0,1,-1,5]);
subplot(324);
plot(time4,Value_isq,'linewidth',1);
grid on
xlabel('t/s');
ylabel('isq/A');
axis([0,1,-10,100]);
subplot(3,2,[5,6]);
plot(time5,Value_fai,'linewidth',1);
grid on
xlabel('t/s');
ylabel('Phir/Wb');
axis([0,1,0,1.5]);
4.系統(tǒng)原理簡(jiǎn)介
永磁同步電機(jī)(Permanent Magnet Synchronous Motor,PMSM)因其高功率密度、高效率和良好的調(diào)速性能等優(yōu)點(diǎn),在工業(yè)自動(dòng)化、電動(dòng)汽車、航空航天等眾多領(lǐng)域得到了廣泛應(yīng)用。然而,PMSM 控制系統(tǒng)的設(shè)計(jì)面臨諸多挑戰(zhàn),例如電機(jī)內(nèi)部的鐵損會(huì)影響電機(jī)的效率和性能,并且在不同的運(yùn)行工況下需要精確的控制策略來保證電機(jī)穩(wěn)定、高效地運(yùn)行。
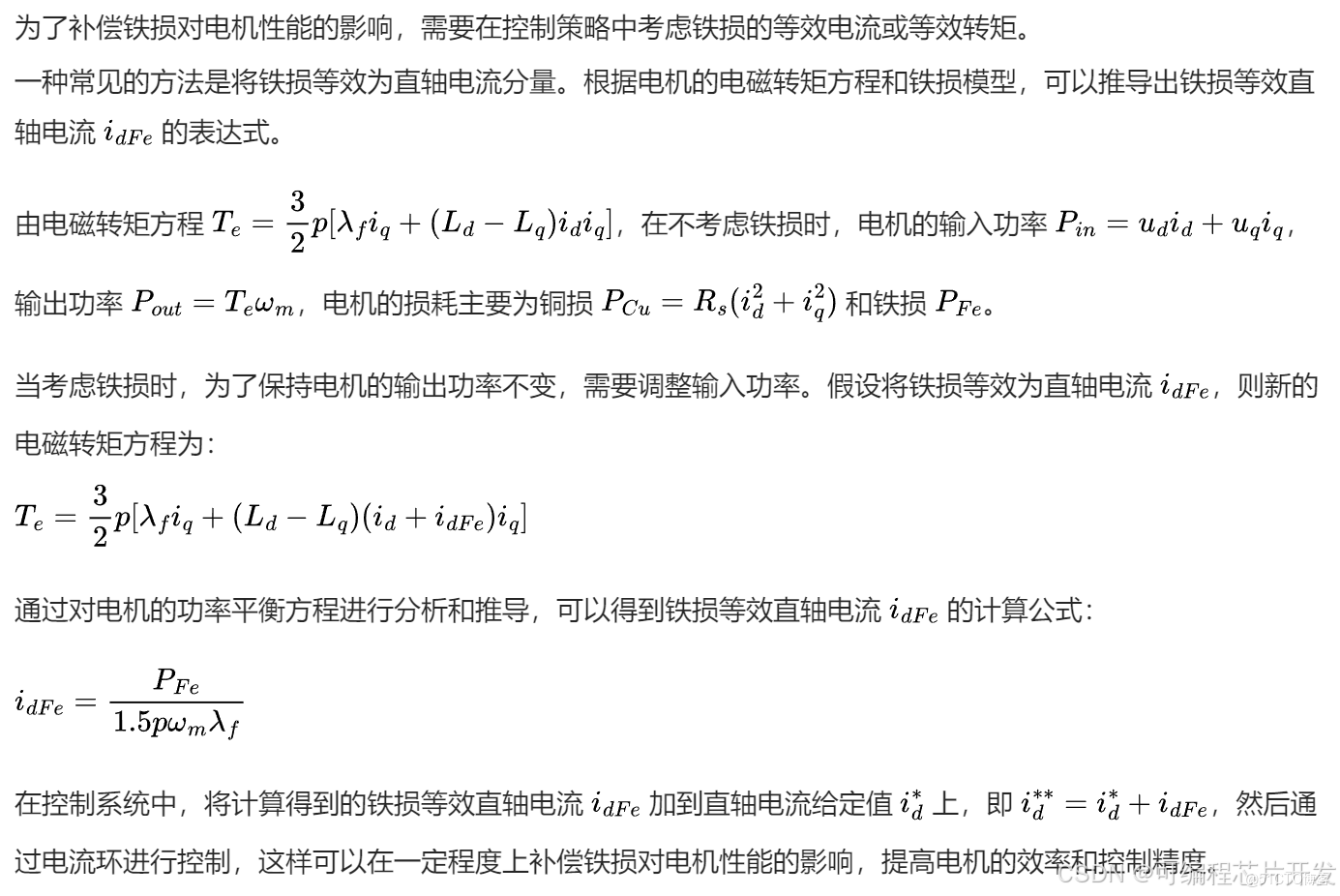
4.1 鐵損模型

4.2 鐵損補(bǔ)償方法
4.3 PI控制器
PI 控制器能夠根據(jù)電流誤差進(jìn)行比例和積分調(diào)節(jié)。比例調(diào)節(jié)可以快速響應(yīng)電流誤差,使電流快速接近給定值;積分調(diào)節(jié)則可以消除穩(wěn)態(tài)誤差,保證電流在穩(wěn)態(tài)時(shí)能夠精確跟蹤給定值。通過合理調(diào)整比例系數(shù)和積分系數(shù),可以使電流環(huán)具有良好的動(dòng)態(tài)和穩(wěn)態(tài)性能。
速度環(huán)的輸出決定了電機(jī)的電磁轉(zhuǎn)矩需求,通過調(diào)整交軸電流給定值來實(shí)現(xiàn)。而電流環(huán)則負(fù)責(zé)精確控制電機(jī)的實(shí)際電流,使其滿足速度環(huán)的要求。這種嵌套的雙環(huán)控制結(jié)構(gòu)使得 PMSM 控制系統(tǒng)能夠在不同的運(yùn)行工況下穩(wěn)定、高效地運(yùn)行。例如,當(dāng)負(fù)載轉(zhuǎn)矩發(fā)生變化時(shí),速度環(huán)首先檢測(cè)到轉(zhuǎn)速誤差,然后調(diào)整交軸電流給定值,電流環(huán)迅速響應(yīng),改變電機(jī)的實(shí)際電流,從而使電機(jī)的轉(zhuǎn)速能夠快速恢復(fù)到給定值。

 浙公網(wǎng)安備 33010602011771號(hào)
浙公網(wǎng)安備 33010602011771號(hào)