
基于雙模MPC和降階擴展狀態觀測器電機控制系統simulink建模與仿真
1.課題概述
基于雙模MPC和降階擴展狀態觀測器電機控制系統simulink建模與仿真。通過雙模MPC實現電機位置控制。
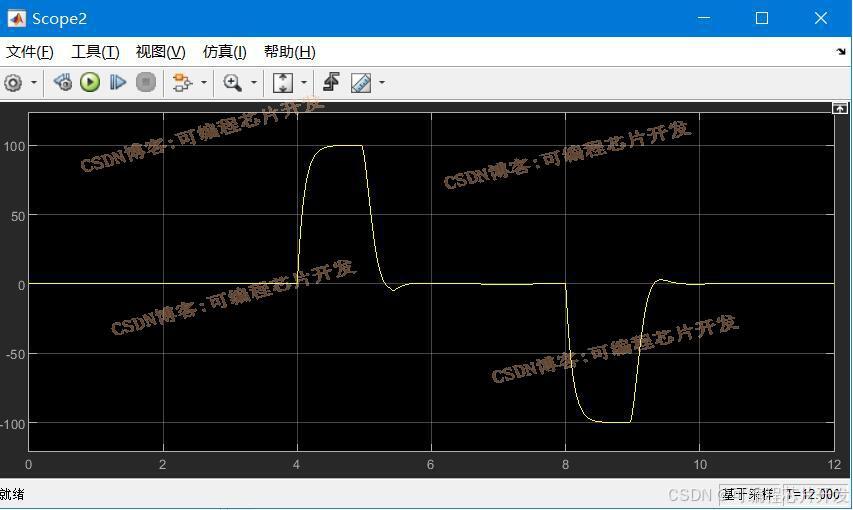
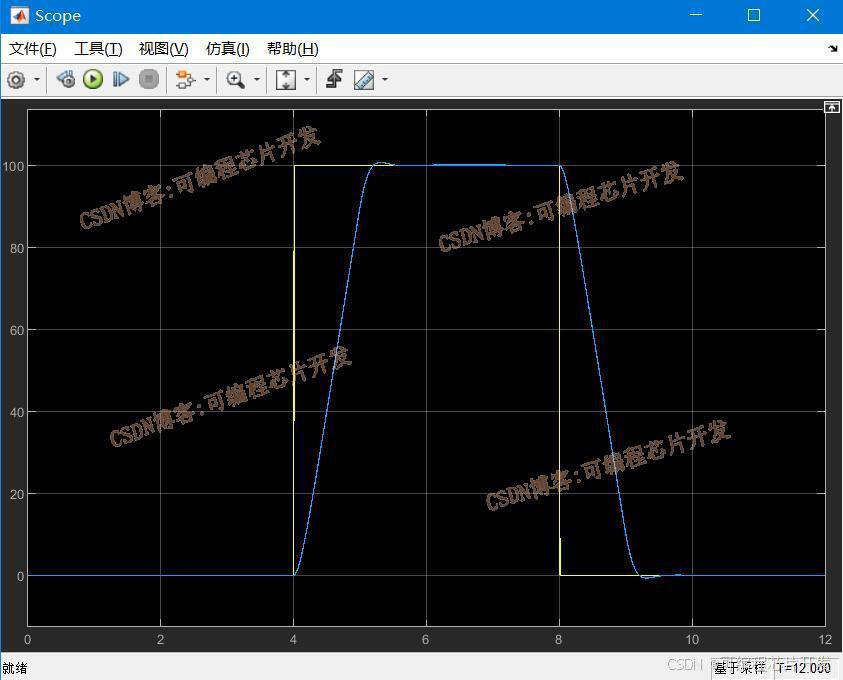
2.系統仿真結果
(完整程序運行后無水印)

3.核心程序與模型
版本:MATLAB2022a

4.系統原理簡介
模型預測控制是一種基于模型的優化控制算法,它通過預測系統未來的輸出,并根據預測結果優化控制輸入,以實現系統的最優控制。模型預測控制的基本思想是在每個采樣時刻,根據當前的系統狀態和預測模型,預測未來一段時間內系統的輸出,并通過優化算法求解一個有限時域的最優控制問題,得到最優的控制輸入序列。然后,將最優控制輸入序列的第一個元素應用于系統,在下一個采樣時刻,重復上述過程。
雙模 MPC 控制器由兩個子控制器組成,分別是速度控制器和電流控制器。速度控制器用于控制電機的角速度,電流控制器用于控制電機的電樞電流。速度控制器和電流控制器分別采用不同的預測模型和優化目標,以實現不同的控制目標。速度控制器的預測模型是電機的角速度模型,優化目標是使電機的角速度跟蹤給定的速度參考值。電流控制器的預測模型是電機的電樞電流模型,優化目標是使電機的電樞電流跟蹤給定的電流參考值。
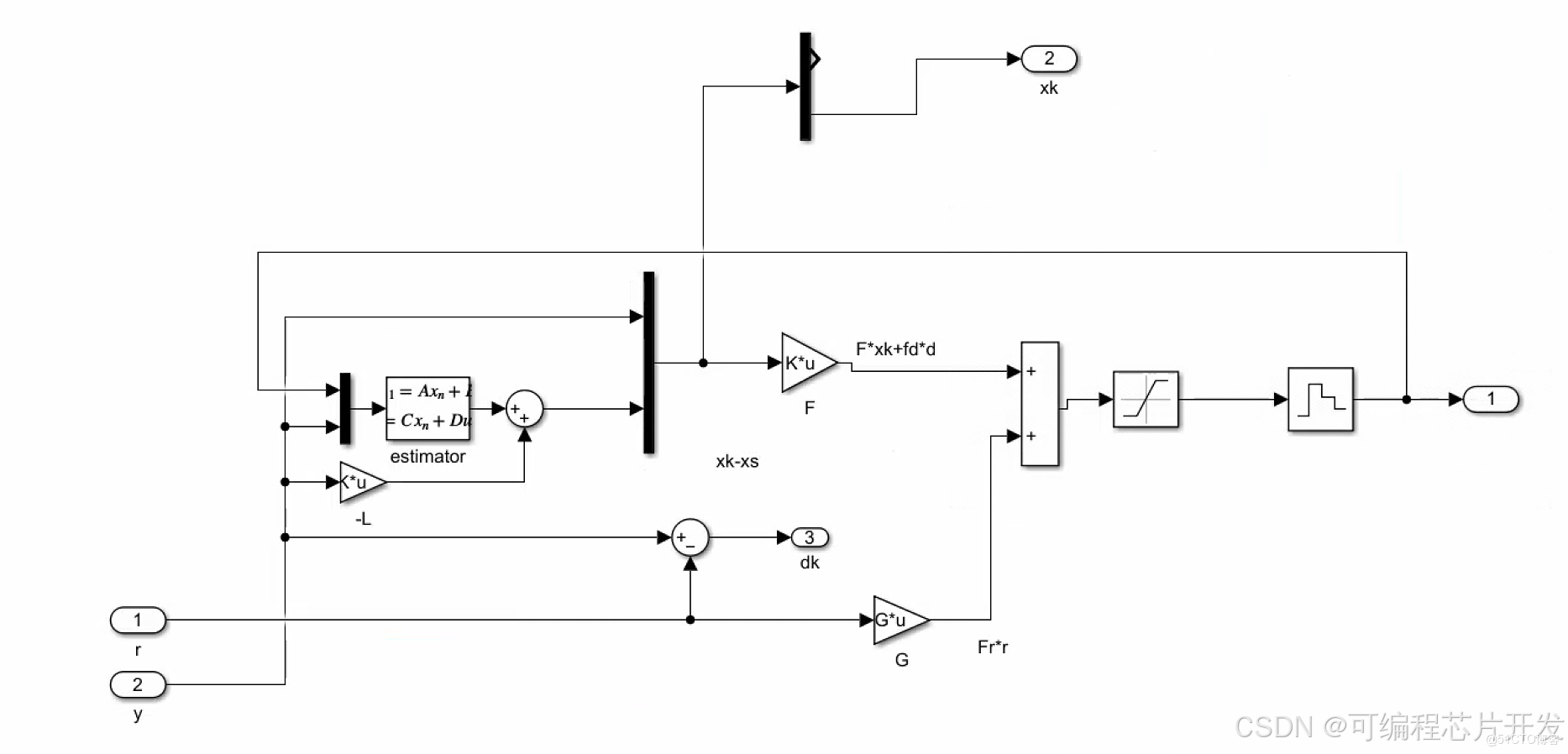
擴展狀態觀測器是一種用于估計系統狀態和未知干擾的觀測器。它通過將系統的未知干擾擴展為一個新的狀態變量,并利用系統的輸入和輸出信息來估計這個新的狀態變量,從而實現對系統狀態和未知干擾的估計。擴展狀態觀測器的基本思想是在系統的狀態方程中引入一個新的狀態變量,用來表示系統的未知干擾。然后,通過設計一個觀測器,利用系統的輸入和輸出信息來估計這個新的狀態變量,從而實現對系統狀態和未知干擾的估計。
擴展狀態觀測器在本系統中結構如下:

 浙公網安備 33010602011771號
浙公網安備 33010602011771號