
深度學習優化器算法巧思速覽
這一篇博文想寫很久了,一直沒有下筆,核心原因也是有一些待辦的思路在攻關驗證。
我們先從一個核心的問題出發,
1. 為什么要研究優化器算法?
它的關聯問題:訓練為什么要調參,調的是什么參?
如果就這個問題去問各種大語言模型,它們能給出一堆的理由。
但就博主而言,答案只有一個:
干掉調參,解放生產力,榨干算力。
說到底就一個字"窮"。
在多年的研發生涯里,對調參這個事深惡痛絕,為什么辛辛苦苦架構出來的模型,一訓練就崩,訓練收斂慢到龜速,這嚴重影響了開發進度,并且增加了很多不可抗力的消耗。
我相信有很多業內同行,都有這種痛,訓練了很久,效果依舊很差,泛化能力也不行,然后就開始苦惱,為什么自己沒有足夠的錢,足夠的算力。
明明自己很好的思路,戛然而止,退而求其次。
早年間,博主經常半夜醒來,看訓練的損失曲線,生怕訓崩。就算沒有訓崩,自己花費了大量時間精力,卻沒有很好的回報。
一次又一次,是很打擊信心的。
在付出了大量時間和人民幣之后,博主終于從泥潭里爬出來了,時光荏苒,這個困擾我九年的問題,畫上句號了。
那大語言模型是怎么回答這個問題的。
核心就一句話:
"沒有新優化器,下一代模型根本訓不起來。"
-
從理論上看,它是在解決一個尚未被完全理解的復雜高維優化問題,充滿挑戰與機遇。
解決基礎性訓練難題——讓模型"能學"
-
從工程上看,它是降低AI研發成本、推動技術普及的關鍵杠桿。
追求極致的效率與效益——讓模型"快學"且"省學"
-
從性能上看,它是提升模型最終準確性、魯棒性和泛化能力的決定性因素。
提升模型的終極性能——讓模型"學好"
最終達到,拓展AI的技術邊界——讓"不可能"成為"可能"
當然就這個問題,大家可以自行去追問各家的大語言模型,給出的結論大同小異。
2. 那博主為什么要寫這篇博文?
最基本的還是希望拋磚引玉,希望能有更多的同行在力大磚飛,燒錢的當下,不要放棄底層算法的研究。
同時為更多的深度學習小白提供一個新的視角,學習并應用深度學習,溫故而知新。
3. 那什么是優化器算法?
優化器算法是驅動機器學習模型學習的"引擎"。它的核心任務是:在訓練過程中,根據損失函數計算出的梯度(即方向),以某種策略更新模型的參數,從而最小化損失函數。
可以將訓練過程想象成在復雜地形中尋找最低點:
- 損失函數:代表地形的高度。
- 模型參數:代表我們在地形中的位置。
- 梯度:代表我們腳下最陡峭的下坡方向。
- 優化器:就是那個決定"往哪個方向走、走多大步、以及是否要考慮之前的慣性"的導航策略。
Adam (Adaptive Moment Estimation)
-
思想:目前最流行和默認的優化器之一。它結合了Momentum和RMSProp的優點。
- 它計算梯度的一階矩(均值,提供動量)和二階矩(未中心化的方差,用于自適應調整學習率)。
- 然后對這兩個矩進行偏差校正,使其在訓練初期不那么偏向于0。
-
優點:
- 通常收斂速度快。
- 對超參數的選擇相對魯棒(默認參數通常就能工作得很好)。
- 能處理噪聲和稀疏梯度。
如果把Adam的一階矩和二階矩去掉,它就蛻變為SGD。
而隨機梯度下降(樸素SGD)是一種優化算法,通過隨機選取單個樣本來近似梯度,從而迭代更新模型參數,收斂至最小值。
換句話說,樸素SGD是一個沒有應用任何先驗補充的野蠻人,較于Adam的平滑學習而言,它就像一只無頭蒼蠅,到處亂撞,也不知道該撞多少次才能收斂至最小值。
4. Adam相較于樸素SGD,它做了哪些改進?
-
引入動量緩沖m,也就是一階矩,指數加權平滑梯度,它積累了歷史梯度的方向趨勢。使得樸素SGD的動蕩趨于平穩平滑。
-
引入自適應步長v,也就是二階矩,指數加權平均的平方,它積累了歷史梯度平方的值趨勢。
最終以 grad = m / sqrt(v) 作為目標梯度進行更新。
對于動量一階矩,基本沒啥好說的,就是求歷史平均梯度,使得訓練平穩。
核心還是自適應步長v,對于頻繁更新、梯度大的參數,其二階矩估計值大,因此實際更新步長會被調小(除以一個大數),避免"步子太大"而越過最優點。
對于不頻繁更新、梯度小的參數,則給予更大的相對步長,鼓勵其更新。
所以Adam能加速較于樸素SGD訓練收斂,二階矩功不可沒。
原本故事到這里,就接近完結了。
在真實的場景下,我們發現Adam還是不夠好。
但它的普及使得深度學習遍地開花。
雖然仍是需要調參,但是不像之前那么"玄學"了。
當然在一些場景下,例如GAN的訓練,仍然有所爭議。
在博主的實測下,此文提及的nSGDA確實比樸素SGD穩健一些。
class nSGDA(torch.optim.Optimizer):
def __init__(
self,
params, # Model parameters
lr: Union[float, torch.Tensor] = 4e-5, # Learning rate (default: 4e-5)
# Coefficients used for computing running averages of gradient (default: 0.9)
momentum: float = 0.9,
# eps (float, optional): term added to the denominator to improve numerical stability (default: 1e-8)
eps: float = 1e-8,
weight_decay: float = 1e-2, # Weight decay (L2 penalty) (default:1e-2)
):
if lr < 0.0:
raise ValueError("Invalid learning rate: {}".format(lr))
if not 0.0 <= eps:
raise ValueError("Invalid epsilon value: {}".format(eps))
if momentum < 0.0 or momentum >= 1.0:
raise ValueError("Invalid momentum value: {}".format(momentum))
if weight_decay < 0.0:
raise ValueError("Invalid weight decay: {}".format(weight_decay))
defaults = dict(
lr=lr,
momentum=momentum,
weight_decay=weight_decay,
eps=eps)
super().__init__(params, defaults)
def step(self, closure=None):
r"""Performs a single optimization step.
Arguments:
closure: A closure that reevaluates the model and returns the loss.
"""
loss = None
if closure is not None:
loss = closure()
for group in self.param_groups:
momentum = group['momentum']
lr = group['lr']
weight_decay = group['weight_decay']
eps = group['eps']
one_minus_momentum = 1.0 - momentum
for p in group['params']:
if p.grad is None:
continue
if p.grad.is_sparse:
raise RuntimeError(
"current optimizer does not support sparse gradients")
state = self.state[p]
# State initialization
if len(state) == 0:
state["m"] = torch.zeros_like(p.grad, memory_format=torch.preserve_format)
m = state['m']
bias_correction = 1.0 - momentum ** state["step"]
if weight_decay != 0:
p.grad = p.grad.add(p.data, alpha=weight_decay)
m.mul_(momentum).add_(p.grad, alpha=one_minus_momentum)
step_size = lr / torch.norm(m.div(bias_correction)).add_(eps).mul_(bias_correction)
p.data.add_(m, alpha=-step_size)
return loss
當你采用Adam調參訓練,總是跑崩或者無法收斂,這個時候,稍微嘗試一下nSGDA也未嘗不可。
而Adam二階矩的存在也實實在在埋了一個雷 : “過沖”問題
本來“對于不頻繁更新、梯度小的參數,則給予更大的相對步長,鼓勵其更新。”
是個很好的想法,
但是有一個特例,那就是訓練到后期,梯度理論上也會越來越小,這個時候也不應該鼓勵其更新。
有可能一更新,跑飛了,這就是后來為什么存在早停(Early Stopping)策略的根由之一。
如果繼續訓練,有可能從次優解里爬出來,但是更多實際情況是,若這里就是最優解,
由于激進地更新,反而會越跑越遠。
理想的情況肯定是,訓練到最優解。最后停在最優解上,或者在最優解周圍轉圈。
但這里有個悖論,
你憑什么認為這里是最優解,而不是次優解,這個標準怎么界定判斷。
而且由于數據的稀缺性,我們希望模型在這種情況下,還能有更強大的泛化能力,即使它沒見過的數據,也能適配到位。
也就是說,
理想上我們既希望能求到解的思路規律,最好覆蓋更多的求解路徑,而不是一條最短的求解路徑。
繞路沒問題,只要這個繞路方式能提升泛化能力。
[1207.0580v1] Improving neural networks by preventing co-adaptation of feature detectors
這就是后來dropout盛行的原因之一,因為簡單有效。
讓一部分神經元失活,也能求到解。
但是dropout這個技術思路,慎用,用得不好,反而會起反作用。
路漫漫其修遠兮,一起努力吧~
5. 后Adam家族時代,百家爭鳴
由于這個話題展開,真的可以寫一本書了。
所以本文的核心是"速覽",博主帶著大家看一看這后Adam的各種巧思。
相關的算法實現,可以參考以下項目倉庫:
PyTorch:
https://github.com/kozistr/pytorch_optimizer
TensorFlow/Keras:
https://github.com/NoteDance/optimizers
本文沒有提及的其他算法,自行移步查閱。
5.1 砍Adam的顯存
由于一階矩m和二階矩v都需要歷史平滑,所以Adam至少要占用兩倍的可訓練模型參數。
這樣一來,只要模型參數一大,那訓練的時候 1+2 = 3 至少要存儲三份權重。顯存很快就不夠用了。
所以,針對這個問題,我們開始磨刀霍霍向二階矩v。
5.1.1 18年的Adafactor
[1804.04235v1] Adafactor: Adaptive Learning Rates with Sublinear Memory Cost
社區比較知名的實現:
transformers/src/transformers/optimization.py at main · huggingface/transformers · GitHub
5.1.2 19年的SM3
[1901.11150] Memory-Efficient Adaptive Optimization
官方實現:
https://github.com/google-research/google-research/tree/master/sm3
Adafactor和SM3都是分解近似的做法。SM3的實現較為復雜,所以基本上沒有被推廣開來。所以很長一段時間都是Adafactor是主流。
但是Adafactor的實現稍微有些問題。
問題函數:
@staticmethod
def _approx_sq_grad(exp_avg_sq_row, exp_avg_sq_col):
# copy from fairseq's adafactor implementation:
# https://github.com/huggingface/transformers/blob/8395f14de6068012787d83989c3627c3df6a252b/src/transformers/optimization.py#L505
r_factor = (exp_avg_sq_row / exp_avg_sq_row.mean(dim=-1, keepdim=True)).rsqrt_().unsqueeze(-1)
c_factor = exp_avg_sq_col.unsqueeze(-2).rsqrt()
return torch.mul(r_factor, c_factor)_approx_sq_grad 這個實現丟失了不少精度。
博主認為比較合理的實現,是把sqrt放到最后計算,精度會高些。
@staticmethod
def _approx_sq_grad(row_exp_avg_sq, col_exp_avg_sq):
row_factor = row_exp_avg_sq.unsqueeze(-1)
row_factor = row_factor.mean(dim=-2, keepdim=True).div(row_factor)
col_factor = col_exp_avg_sq.unsqueeze(-2)
return row_factor.div(col_factor).sqrt_()5.1.3 22年的Amos
[2210.11693]Amos: An Adam-style Optimizer with Adaptive Weight Decay towards Model-Oriented Scale
在Adafactor和SM3之后很長一段時間,砍優化器顯存占用這個事情似乎被遺忘了。
直到Amos的出現,它進一步砍掉了v的顯存占用,直接采用了平方均值,美其名曰"信息共享"。
顯存不夠用,又想保住精度,可以考慮采用Amos,當然它較之Adam還有不少改進點。
5.1.4 24年損失作為學習率的奇思妙想
利用損失值(loss)本身來動態調整優化器的學習率,以此作為替代二階v實現更快的收斂。
非常簡單的思路: “損失越大,學習率越大;損失越小,學習率越小。”
AdaLo: Adaptive learning rate optimizer with loss for classification
由于論文沒有給出開源實現,也沒有搜到第三方實現。
參考論文的思想,實現了該思路,代碼實現不完全對應論文內容,僅供參考學習。
# mypy: allow-untyped-defs
from typing import Tuple, Union
import torch
from torch import GradScaler
class AdaLo(torch.optim.Optimizer):
r"""
AdaLo: Adaptive Learning Rate Optimizer with Loss for Classification
paper: https://www.sciencedirect.com/science/article/abs/pii/S0020025524015214
code: https://github.com/cpuimage/AdaLo
usage:
for inputs, labels in dataloader:
def closure(inp=inputs, lbl=labels):
optimizer.zero_grad()
loss = criterion(model(inp), lbl)
loss.backward()
return loss
optimizer.step(closure)
Args:
params: Iterable of parameters to optimize or dicts defining
parameter groups.
lr: Learning rate (not used for step size calculation due to the adaptive learning rate mechanism; retained solely for API consistency)
betas: (beta1, beta2) coefficients for gradient momentum and loss-EMA smoothing respectively
weight_decay: L2 weight decay
kappa: loss scaling factor
eps: float. term added to the denominator to improve numerical stability.
mode: control learning rate adaptation mode ('adversarial' or 'compliant')
'adversarial': decrease learning rate when loss increases (conservative strategy)
'compliant': increase learning rate when loss increases (aggressive strategy)
"""
def __init__(self,
params,
lr: Union[float, torch.Tensor] = 1e-8,
betas: Tuple[float, float] = (0.9, 0.999),
weight_decay: float = 1e-2,
kappa: float = 3.0,
eps: float = 1e-8,
mode: str = 'adversarial'):
if lr < 0.0:
raise ValueError("Invalid learning rate: {}".format(lr))
if betas[0] < 0.0 or betas[0] >= 1.0:
raise ValueError("Invalid beta1 value: {}".format(betas[0]))
if betas[1] < 0.0 or betas[1] >= 1.0:
raise ValueError("Invalid beta2 value: {}".format(betas[1]))
if weight_decay < 0.0:
raise ValueError("Invalid weight decay: {}".format(weight_decay))
defaults = dict(lr=lr, beta1=betas[0], beta2=betas[1], weight_decay=weight_decay, kappa=kappa,
mode=mode, eps=eps)
super(AdaLo, self).__init__(params, defaults)
def step(self, closure=None, scaler: GradScaler = None, loss=None):
already_updated_by_scaler = False
if closure is not None:
with torch.enable_grad():
loss = closure()
if scaler is not None:
scaler.scale(loss).backward()
scaler.unscale_(self)
scaler.step(self, loss=loss)
scaler.update()
already_updated_by_scaler = True
if not already_updated_by_scaler:
for group in self.param_groups:
beta1 = group['beta1']
beta2 = group['beta2']
weight_decay = group['weight_decay']
kappa = group['kappa']
mode = group['mode']
eps = group['eps']
for p in group['params']:
if p.grad is None:
continue
if p.grad.is_sparse:
raise RuntimeError("current optimizer does not support sparse gradients")
state = self.state[p]
if len(state) == 0:
state['m'] = torch.zeros_like(p.data)
state['loss_ema'] = torch.tensor(0.0, device=p.device, dtype=p.dtype)
m = state['m']
loss_ema = state['loss_ema']
m.lerp_(p.grad, 1.0 - beta1)
if loss is not None:
scaled_loss = torch.log1p(loss.detach())
transformed_loss = (torch.tanh(-scaled_loss * 0.5) + 1.0) * 0.5
loss_ema.lerp_(transformed_loss, 1.0 - beta2)
if mode == 'adversarial':
lr_t = loss_ema.div(kappa).clamp_min_(eps)
else:
lr_t = (1.0 - loss_ema).div(kappa).clamp_min_(eps)
if weight_decay != 0:
p.data.mul_(1.0 - lr_t * weight_decay)
p.data.sub_(m * lr_t)
return loss在一些場景下實測也是很穩健,lr = v = loss 不得不夸一下論文原作者的奇思妙想。
PyTorch官方使用amp混合精度的時候,GradScaler.step里有這么一句。
if "closure" in kwargs:
raise RuntimeError(
"Closure use is not currently supported if GradScaler is enabled."
)也就是說閉包和amp混合當前不支持一起用。
在AdaLo代碼倉庫里,博主演示怎么魔改實現閉包和amp可以同時使用,感興趣的可以閱讀具體實現。
在實測過程中,發現 “損失越大,學習率越大;損失越小,學習率越小。”
這個做法在一些場景下比較激進,所以增加了一個新的參數為mode可切換學習率適配模式,默認設為保守模式。
分別對應
- adversarial (保守模式):“損失越大,學習率越小;損失越小,學習率越大。”
- compliant (激進模式) :“損失越大,學習率越大;損失越小,學習率越小。”
5.1.5 窮到極致,什么都能接受
如果顯存極度匱乏,手頭還挺緊,能訓練比什么都重要的話。
[2412.08894] SMMF: Square-Matricized Momentum Factorization for Memory-Efficient Optimization
采用 非負矩陣分解(NNMF),將梯度權重轉換為最接近正方形的矩陣,分解為行列兩個向量。
雖然是有損的壓縮解壓操作,但在一些特定的場景能減少可觀的內存占用,在內存效率和優化性能之間取得相對平衡。
核心算法如下:
@torch.no_grad()
def _unnmf(self, row_col: tuple) -> torch.Tensor:
return torch.outer(row_col[0], row_col[1])
@torch.no_grad()
def _nnmf(self, matrix: torch.Tensor, out) -> tuple:
shape = matrix.shape
torch.sum(matrix, dim=1, out=out[0])
torch.sum(matrix, dim=0, out=out[1])
if shape[0] < shape[1]:
scale = out[0].sum()
if scale != 0:
torch.div(out[0], scale, out=out[0])
else:
scale = out[1].sum()
if scale != 0:
torch.div(out[1], scale, out=out[1])
return out
5.2 Adam二階矩v為0的問題
導致v為0有很多原因,在模型訓練的不同階段,由于噪聲也好,精度也好,會直接或者間接導致v為0。
前面提到 grad = m / sqrt(v)
早期Adam論文里的解決方案就是直接給v加上一個epsilon,一般設為1e-8,避免除以0。
而后續經過不少團隊的實踐發現這么做有點魯莽。
然后就有人開始針對這個問題進行修改。
但是林林總總,都是把epsilon移來移去,例如梯度平方后就加上epsilon,再進行指數加權平均。
也有采用softplus抑制分母過小的做法:
[1908.00700] Calibrating the Adaptive Learning Rate to Improve Convergence of ADAM
grad = m / softplus(sqrt(v))
這個問題一直到了2024年,有新的進展。
[2407.05872v2] Scaling Exponents Across Parameterizations and Optimizers
方法很簡單,刪除epsilon,采用atan2。
grad = atan2(m, sqrt(v))
從數值穩定的角度來說,atan2確實是穩定了許多,而且基本規避了一些特殊情況下訓練跑崩,導致損失為nan的情況。
Adam的betas默認參數是(0.9,0.999) ,也有人覺得這里也存在調參適配問題。
刪除epsilon一般都可以理解,但把動量參數也干掉,做成自適應的"膽大妄為",也是挺絕的。
[2510.04988v1] Adaptive Memory Momentum via a Model-Based Framework for Deep Learning Optimization
不管成不成功,效果幾何,就這魄力,值得我在此一提。
5.3 Adam的梯度長尾問題
這個很好理解,由于一階矩m和二階矩v都采用了指數平均,在不同程度上也是導致梯度長尾的誘因之一。
因為求平均值這個事,就跟奧運比賽打分一樣,只用均值很不公平。去掉一個最高分,去掉一個最低分,然后再算平均相對合理一些。
求損失均值的時候一樣存在,博主曾經設想過,也許求損失的中位數是一個可行的做法,但也有一定的局限性。
沒有經過嚴格驗證的求損失中位數思路的實現,僅供參考:
def soft_median(losses, temperature=None):
if temperature is None:
temperature = max(0.1, 0.5 * losses.std())
if losses.numel() % 2 == 0:
losses = torch.cat([losses, losses.new_zeros(1)])
x_sorted, _ = torch.sort(losses)
n_loss = losses.shape[0]
median_idx = (n_loss - 1) * 0.5
idxs = torch.arange(n_loss, device=losses.device, dtype=losses.dtype)
weights = torch.softmax(-torch.abs(idxs - median_idx) / temperature, dim=0)
return torch.dot(weights, x_sorted)同樣的,梯度在訓練過程中變化很大,一些長尾樣本帶來的貢獻就會被淹沒掉。
帶來的后果,不是過擬合,就是泛化差,能拿到次優解那是屬于幸運兒了。
這個方向的研究多,也不多,因為很多長尾問題基本上不會考慮在優化器里解決,一般會采用損失加權懲罰的思路來緩解。
這篇論文可以幫助進一步理解梯度長尾問題。
[2201.05938v2] GradTail: Learning Long-Tailed Data Using Gradient-based Sample Weighting
當然它不是一個主流的方案和思路,主流的方案更多的是采用元學習之類的做法,局限性也比較大。
那該如何直觀地洞察梯度長尾呢?
采用TensorBoard,對參數和梯度進行可視化,查看其直方圖,非常直觀。
示例如下:
參數直方圖:

從參數權重的分布來看,藍色左邊一直在拖尾,紅色的左邊尾巴開始右移聚攏。從參數來看,可以看到一些趨勢,但不夠直觀。
我們再來看其對應的梯度直方圖:
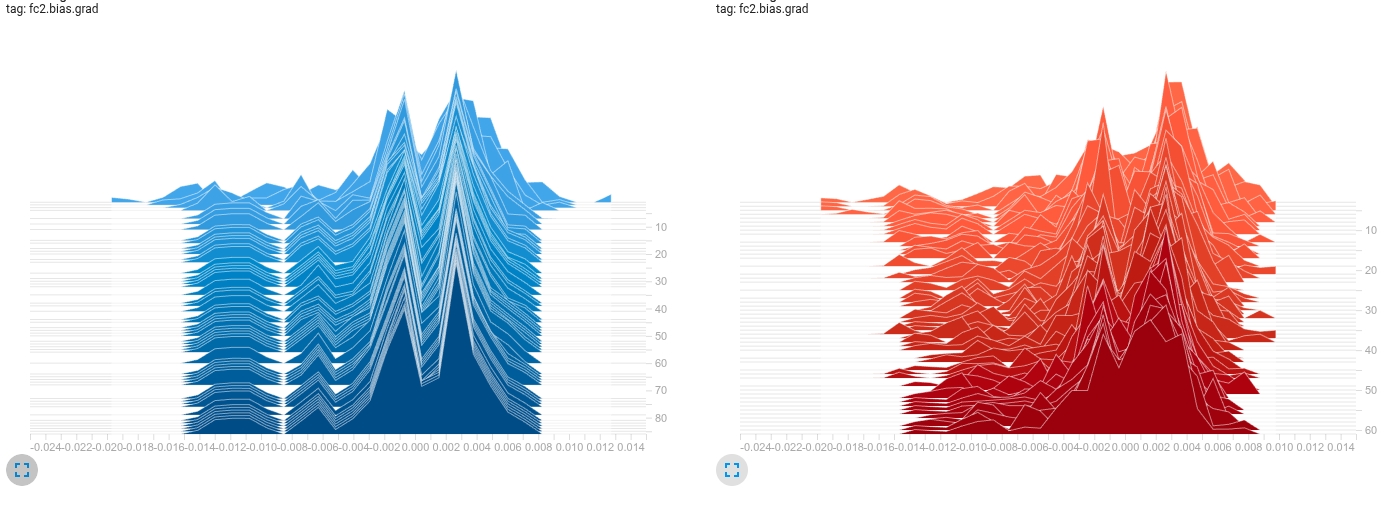
這就一目了然,左邊藍色明顯存在梯度長尾,而右邊紅色的梯度長尾逐漸開始消失,且紅色更趨向于正態分布。
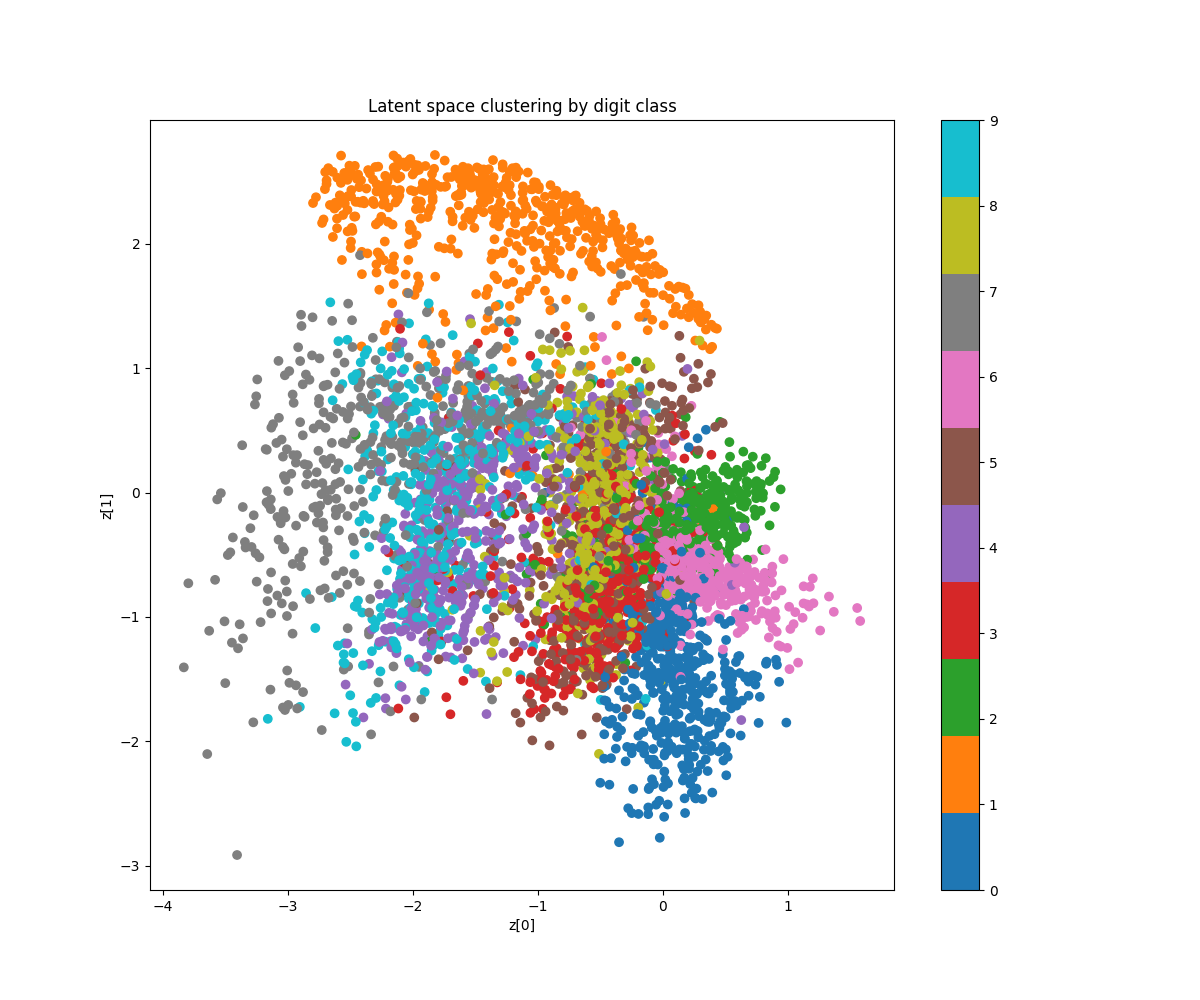
我們再看另一組圖:
 |
|
這是vae潛空間0-9十個數字的聚類圖。
相關vae代碼示例見:https://github.com/cpuimage/AdaLo
圖二整體聚合接近一個圓圈,而圖一接近橢圓。
這兩種情況,是圖二還是圖一的模型權重泛化能力更勝一籌呢。
答案是圖二,它的kl散度損失更低。
真實情境下長尾也可以是噪聲或標簽錯誤,所以擬合長尾也不是完全是一件好事情。
一切以實測效果為準,長尾梯度只是一個僅供參考項。
博主一直認為如果可以優雅解決長尾問題,那是新一輪的曙光。
5.4 Adam的過擬合問題
由于Adam本身的機制問題,
訓練損失下降極快 → 模型迅速進入插值(interpolation)區域 → 參數范數容易膨脹 → 邊界更復雜 → 泛化差。
當然長尾問題也是它導致過擬合的原因之一。
比較知名且使用廣泛的方案是l2正則化,即權重衰減。
Adam 進化為 AdamW,也就是現在主流的優化器算法
它思路也是非常簡單粗暴,在每次更新時,從權重中減去一個固定的比例(weight * weight_decay),是正則也是先驗懲罰。
[1711.05101v3] Decoupled Weight Decay Regularization
權重衰減是一個很好的思路,但它帶來了一個新的問題。衰減量設為多少才是合適的,也就是說,懲罰力度該如何界定。
衰減過大,學習收斂緩慢,衰減過小,沒有起到作用。
隨后Scheduled (Stable) Weight Decay也被提出,但是應用不廣,鮮為人知。
它的思路也很簡單,通過匯總整個模型的參數信息,按照參數權重占比估算出每一層的衰減權重。
而有另一篇論文從另一個新穎的角度提出了一個方案。
它的思路是在每次更新時,從權重中減去一個單元范數權重,可以近似看做是為權重衰減提供了范數先驗。
而后,將正則化從“加性懲罰”轉變為“約束優化” Constrained Parameter Regularization (CPR)
[2311.09058] Improving Deep Learning Optimization through Constrained Parameter Regularization
CPR 作為替代權重衰減的替代方案,就是為了權重衰減的調參困局,但請慎用。
為了改善權重衰減帶來的收斂變慢問題,Cautious Weight Decay 隨即也被提出。
[2510.12402v1] Cautious Weight Decay
思路比較簡單,偽代碼一眼就能看懂。
grad = m / (torch.sqrt(v) + epsilon) m = (p * grad).sign_().clamp_min_(0) cautious_weight_decay = weight_decay * m
它的靈感多半來自此:
[2411.16085v3] Cautious Optimizers: Improving Training with One Line of Code

至于m要不要改寫成 m / (m.mean()+eps),用在不同優化器內部性質不太一樣,
如果是Adam理論上可以不做這個操作,但如果用在SGD里,為了穩定性,可以考慮 m / (m.mean()+eps) 。
實在不確定,就實測。
思路出發點都是考慮方向的一致性。
一個作用在參數,參數與更新梯度的方向,一個作用在梯度,當前梯度與平滑梯度的方向。
真的是萬變不離其宗,但凡能作用在梯度的,理論上也能作用在參數。
5.5 學習率熱身與梯度裁剪
在說到Adam過擬合的時候,我們很容易就發現了一個問題。
在不同的模型架構,訓練的每個階段,每層權重的值域是不一樣的,而且這個值域隨著訓練的增加,也一直在變化。
由于這個核心問題的存在,訓練早期梯度的波動就會很大,這個時候通常就需要學習率調參,或者在模型內部加入歸一化層,目的盡可能快地把每一層的值域確立下來。
由此就引發出來學習率熱身以及梯度裁剪相關的思考。
學習率熱身相關的資料和論文也有很多,這里不展開細講。
學習率規劃熱身的基本邏輯都是:
早期用極其小的學習率進行預熱訓練 → 中期慢慢地增大學習率 → 后期再固定學習率或者慢慢減少學習率
雖然很傻,但是確實有效。
21年的時候谷歌為了把歸一化層刪掉,就提出了自適應梯度裁剪方案。
[2102.06171] High-Performance Large-Scale Image Recognition Without Normalization
思路也很簡單,根據每層梯度和權重的值域,按比例縮放當前的梯度。
25年終于有人想要把學習率預熱刪掉。
[2505.21910] Taming Transformer Without Using Learning Rate Warmup
思路跟Scheduled (Stable) Weight Decay很像,只不過這次是作用在學習率上罷了。
本質就是根據每層權重梯度比例算出來一個全局學習率的縮小率。由于每層的激活函數不一樣,算出來一個全局縮小率,從邏輯上其實很牽強。
當然除此之外還有其他類似的思路,例如:
梯度范數化
def gradient_normalization(grad, eps: float = 1e-8):
grad.div_(grad.norm(p=2) + eps)層范數化縮放
[1904.00962v5] Large Batch Optimization for Deep Learning: Training BERT in 76 minutes
def layer_norm_adaptation(grad, var):
w_norm = var.norm(p=2)
g_norm = grad.norm(p=2)
grad.mul_(torch.where(torch.greater(w_norm, 0),
torch.where(torch.greater(g_norm, 0), (w_norm / g_norm), 1.0),
1.0))梯度中心化
[2004.01461v2] Gradient Centralization: A New Optimization Technique for Deep Neural Networks
def centralize_gradient(grad):
if grad.dim() > 1:
grad.data.add_(-grad.mean(dim=tuple(range(1, grad.dim())), keepdim=True))林林總總,大同小異。
博主根據自己的理解,也寫了個梯度軟裁剪,代碼如下。
@staticmethod
def _soft_clip(grad, var, epsilon=1e-12):
dim = None if (r := var.dim()) <= 1 else tuple(range(1, r))
var_norm = var.square().mean(dim=dim, keepdim=True).sqrt_().clamp_min_(epsilon)
grad_norm = grad.square().mean(dim=dim, keepdim=True).sqrt_().clamp_min_(epsilon)
clipped_norm = grad_norm.clamp_max(var_norm)
return grad.mul_(clipped_norm / grad_norm)5.6 如何進一步加速訓練收斂
前面已經提到不少關于調參,穩定性問題,但大多數人最關心的還是怎么加速訓練。
主要的思路,基本上就是根據上一步的梯度信息,結合當前步的梯度,在兩步之間求出一個合理的方向,往這個方向再走一步。
這樣做有個好處,就是可以結合上一步的位置進一步修正方向,其實就是殘差加權的路子。
[1909.11015v4] diffGrad: An Optimization Method for Convolutional Neural Networks
[2106.11514v3] Rethinking Adam: A Twofold Exponential Moving Average Approach
有前后梯度交替的做法,自然也就有參數交替的做法。
[1907.08610v2] Lookahead Optimizer: k steps forward, 1 step back
但這兩種做法都有一個弊端,就是需要多存一份參數,顯存又要不夠用了。
當然如果不考慮顯存占用問題,
也可以采用Grünwald-Letnikov(G-L)分數階導數,它利用分數階微積分的全局記憶,
將參數更新的梯度替換為G-L分數階近似梯度,從而更好地利用過去的長期曲率信息。
在某些場景下,算力充足,也是一種選擇。
如果考慮顯存有限的話,
有一個折中的做法,Nesterov momentum,Adam升級為NAdam,它的思路也很簡單"先沿慣性走一步,再看新梯度,沿修正后的方向走",也就是從Adam的"看一步走一步"變成了"看一步想兩步"。
Incorporating Nesterov Momentum into Adam | OpenReview
但是總感覺有點牽強,結合上面提到了各種巧思手段,隨即就有人想到了梯度范數也是一種先驗。
對梯度范數進行指數加權平均,根據這個信息,動態調整梯度,換言之也就是動態調整學習率。
[2210.06364v1] AdaNorm: Adaptive Gradient Norm Correction based Optimizer for CNNs
但這個思路也潛藏著一個弊端,跟v一樣的問題,
訓練后期,激進加速,不但沒有獲得應有的收益,反而會引發不穩定,最終跑偏。
只能說力的作用是相互的,給它一個推力的時候,一定要設置一個相應的阻力去制衡,達到相對穩態。
似乎一切都在往更理想的方向推進著。
看到這里,我相信有很多同學會問,加大學習率,難道不能加速訓練收斂嗎?
我的回答是,能,只有一個前提條件,就是batch size足夠的大,且優化器算法足夠的穩健。
因為看的信息足夠多,用大學習率,直接邁大一步,是肯定沒有問題的。
這個博主已經經過驗證,實測過了。
大多數情況下,我們看到訓練加速,損失飛快地降,不存在過擬合的話,絕大多數都是模型正在調整權重到對應的值域范圍。
假設你使用了Sigmoid激活函數,輸入的值在 [-6,6]左右的區間,對應的輸出值是(0.0025, 0.9975)。
也就是說在Sigmoid的前一層,至少是[-6,6]的值域,才有信息能往后傳。
如果你在Sigmoid前面野蠻地采用了歸一化,卻不進行縮放加權,放大它的值。那這個神經元基本上處于失活的狀態。
所以理想的情況下在進入Sigmoid前手動放大值域,也算是一種先驗,至于放大3.0,放大6.0那就看Sigmoid前一層到底做了什么了。
看到這里,我相信應該沒有人會問歸一化層到底應該加在哪里合適了吧。
這里只是便于理解,舉了個小例子。
經常會有人問Muon這個基于矩陣正交化的優化器,實測為什么沒有傳說中那么高效。
[2502.16982v1] Muon is Scalable for LLM Training
你都已經看到這里了,Muon是個什么玩意,你別跟我說,你心里沒數。
以上,初稿寫于2025.10.06。
商業轉載請聯系作者進行授權,非商業轉載請注明出處。
若有各種其他問題可以通過以下方式聯系博主交流學習。
微信: Dbgmonks
QQ: 200759103
郵箱: gaozhihan@vip.qq.com
注: 不注明來意者一律拒絕。
博主目前進度:
- 無需熱身階段
- 免調學習率
- 無需歸一化層
- 修正梯度累積,實現等效大批次性能
- 緩解長尾梯度
- 加速訓練收斂
- 低顯存占用
License
This work is licensed under a Creative Commons Attribution-ShareAlike 4.0 International License.

 浙公網安備 33010602011771號
浙公網安備 33010602011771號