
WebGPU實現Ray Packet
大家好~本文在如何用WebGPU流暢渲染百萬級2D物體?基礎上進行優化,使用WebGPU實現了Ray Packet,也就是將8*8=64條射線作為一個Packet一起去訪問BVH的節點。這樣做的好處是整個Packet只需要一個維護BVH節點的Stack,節省了GPU Shared Memory;壞處是一個Packet的64條射線是并行計算的,需要實現同步邏輯,并且針對GPU的架構進行并行優化
相關文章如下:
如何用WebGPU流暢渲染百萬級2D物體?
成果
我們渲染1百萬個圓環,對比優化前的Demo:
性能指標:
- FPS基本上沒有變化
- GPU Shared Memory的占用減少為1/5
在FPS不變的情況下,Stack的大小可以從之前的最大值20提升到最大值100
硬件:
- Mac OS Big Sur 11.4操作系統
- Canary瀏覽器
- Intel Iris Pro 1536 MB集成顯卡
算法實現
每條射線使用一個局部單位,所以一個Packet共使用8*8=64個局部單位
這里將射線與相機近平面的交點變換到了屏幕坐標系下,變量名為pointInScreen(之前的Demo中的交點是在世界坐標系下)
整個算法的相關實現代碼如下所示:
var<workgroup>stackContainer: array<TopLevel, 20>;
var<workgroup>rayPacketAABBData: array<f32, 4>;
var<workgroup>isRayPacketAABBIntersectWithTopLevelNode: bool;
var<workgroup>rayPacketRingIntersectLayer: array<u32, 64>;
var<workgroup>stackSize: u32;
var<workgroup>isAddChild1: bool;
var<workgroup>isAddChild2: bool;
...
fn _intersectScene(ray: Ray, LocalInvocationIndex : u32) -> RingIntersect {
var intersectResult: RingIntersect;
intersectResult.isClosestHit = false;
intersectResult.layer = 0;
var rootNode = topLevel.topLevels[0];
var pointInScreen = ray.rayTarget;
// 用兩個局部單位并行創建Packet的AABB
if (LocalInvocationIndex == 0) {
rayPacketAABBData[0] = pointInScreen.x;
rayPacketAABBData[1] = pointInScreen.y;
}
if (LocalInvocationIndex == 63) {
rayPacketAABBData[2] = pointInScreen.x;
rayPacketAABBData[3] = pointInScreen.y;
}
//用一個局部單位并行初始化共享變量
if (LocalInvocationIndex == 1) {
stackSize = 1;
stackContainer[0] = rootNode;
}
workgroupBarrier();
//遍歷BVH節點
while (stackSize > 0) {
//在循環開始的時候要同步下(暫時不清楚原因,反正是因為stackSize是共享變量造成的)
workgroupBarrier();
if (LocalInvocationIndex == 0) {
stackSize -= 1;
}
workgroupBarrier();
var currentNode = stackContainer[stackSize];
var leafInstanceCountAndMaxLayer = u32(currentNode.leafInstanceCountAndMaxLayer);
var leafInstanceCount = _getLeafInstanceCount(leafInstanceCountAndMaxLayer);
//如果是葉節點,則Packet中所有射線都與該節點進行相交檢測
if (_isLeafNode(leafInstanceCount)) {
//判斷射線是否與節點的AABB相交
if (_isPointIntersectWithTopLevelNode(pointInScreen, currentNode)) {
var leafInstanceOffset = u32(currentNode.leafInstanceOffset);
var maxLayer = _getMaxLayer(u32(currentNode.leafInstanceCountAndMaxLayer));
//判斷射線是否與節點包含的所有圓環相交
while (leafInstanceCount > 0) {
var bottomLevel = bottomLevel.bottomLevels[leafInstanceOffset];
//判斷射線是否與圓環的AABB相交
if (_isPointIntersectWithAABB(pointInScreen, bottomLevel.screenMin, bottomLevel.screenMax)) {
var instance: Instance = sceneInstanceData.instances[u32(bottomLevel.instanceIndex)];
var geometry: Geometry = sceneGeometryData.geometrys[u32(instance.geometryIndex)];
//判斷射線是否與圓環相交
if (_isIntersectWithRing(pointInScreen, instance, geometry)) {
var layer = u32(bottomLevel.layer);
if (!intersectResult.isClosestHit || layer > intersectResult.layer) {
intersectResult.isClosestHit = true;
intersectResult.layer = layer;
intersectResult.instanceIndex = bottomLevel.instanceIndex;
}
}
}
leafInstanceCount = leafInstanceCount - 1;
leafInstanceOffset = leafInstanceOffset + 1;
}
}
}
//如果不是葉節點,則通過剔除檢測后加入兩個子節點
else {
// 一個非葉節點必有兩個子節點
var child1Node = topLevel.topLevels[u32(currentNode.child1Index)];
var child2Node = topLevel.topLevels[u32(currentNode.child2Index)];
var child1NodeMaxLayer = _getMaxLayer(u32(child1Node.leafInstanceCountAndMaxLayer));
var child2NodeMaxLayer = _getMaxLayer(u32(child2Node.leafInstanceCountAndMaxLayer));
//并行計算Packet中所有射線的最小layer
rayPacketRingIntersectLayer[LocalInvocationIndex] = intersectResult.layer;
workgroupBarrier();
if (LocalInvocationIndex < 32) {
_minForRayPacketRingIntersectLayer(LocalInvocationIndex, LocalInvocationIndex + 32);
}
workgroupBarrier();
if (LocalInvocationIndex < 16) {
_minForRayPacketRingIntersectLayer(LocalInvocationIndex, LocalInvocationIndex + 16);
}
workgroupBarrier();
if (LocalInvocationIndex < 8) {
_minForRayPacketRingIntersectLayer(LocalInvocationIndex, LocalInvocationIndex + 8);
}
workgroupBarrier();
if (LocalInvocationIndex < 4) {
_minForRayPacketRingIntersectLayer(LocalInvocationIndex, LocalInvocationIndex + 4);
}
workgroupBarrier();
if (LocalInvocationIndex < 2) {
_minForRayPacketRingIntersectLayer(LocalInvocationIndex, LocalInvocationIndex + 2);
}
workgroupBarrier();
//用兩個局部單位并行判斷子節點是否在Packet的前面以及Packet的AABB是否與子節點相交
if (LocalInvocationIndex == 0) {
isAddChild1 = child1NodeMaxLayer > rayPacketRingIntersectLayer[0] && _isRayPacketAABBIntersectWithTopLevelNode(rayPacketAABBData, child1Node);
}
if (LocalInvocationIndex == 1) {
isAddChild2 = child2NodeMaxLayer > rayPacketRingIntersectLayer[0] && _isRayPacketAABBIntersectWithTopLevelNode(rayPacketAABBData, child2Node);
}
workgroupBarrier();
// 加入兩個子節點到stack中
if (LocalInvocationIndex == 0) {
if (isAddChild1) {
stackContainer[stackSize] = child1Node;
stackSize += 1;
}
if (isAddChild2) {
stackContainer[stackSize] = child2Node;
stackSize += 1;
}
}
}
workgroupBarrier();
}
return intersectResult;
}
“創建Packet的AABB”代碼說明
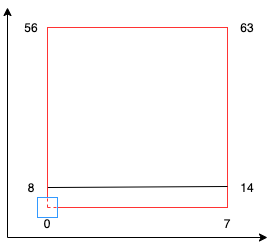
如上圖所示,紅色方塊為Packet的2D AABB,由64個射線的pointInScreen組成
圖中藍色方塊為一個pointInScreen,從中心點開始
pointInScreen對應的局部單位序號是從紅色方塊左下角開始,朝著右上方增加。
部分局部單位序號在圖中用數字標注了出來
所以Packet的2D AABB的min即為0號局部單位對應的pointInScreen,而max則為63號局部單位對應的pointInScreen
創建Packet的AABB的相關代碼如下:
var pointInScreen = ray.rayTarget;
// 用兩個局部單位并行創建Packet的AABB
if (LocalInvocationIndex == 0) {
rayPacketAABBData[0] = pointInScreen.x;
rayPacketAABBData[1] = pointInScreen.y;
}
if (LocalInvocationIndex == 63) {
rayPacketAABBData[2] = pointInScreen.x;
rayPacketAABBData[3] = pointInScreen.y;
}
并行計算的優化點
因為現在需要對一個Packet中64條射線并行計算,所以需要了解GPU的架構和特點,從而進行相應的優化
GPU是以warp為單位,每個wrap包含32個線程。所以我們這里的一個Packet應該使用了兩個wrap,其中一個wrap中的一個線程對應一個局部單位
并行計算的優化點為:
-
只有當整個wrap中所有線程都不執行某個操作時,這個wrap才不會被執行,從而FPS會提高。只要wrap中至少有一個線程要執行某個操作,那么即使其它所有線程不執行該操作,它們也會在執行"workgroupBarrier()"時等待)
-
GPU中Memory IO是個瓶頸,所以應該減少內存讀寫操作
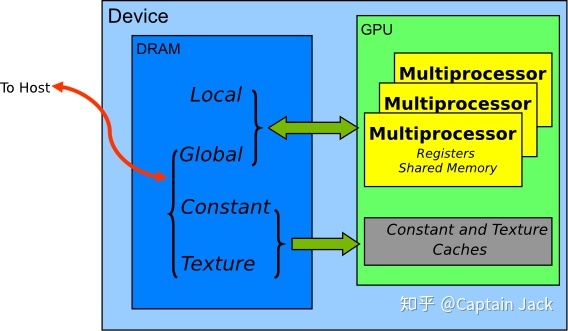
GPU內存類型分為寄存器、共享、局部、常量、紋理、全局,讀寫速度依次遞減
內存模型如下圖所示:
內存特性如下圖所示:
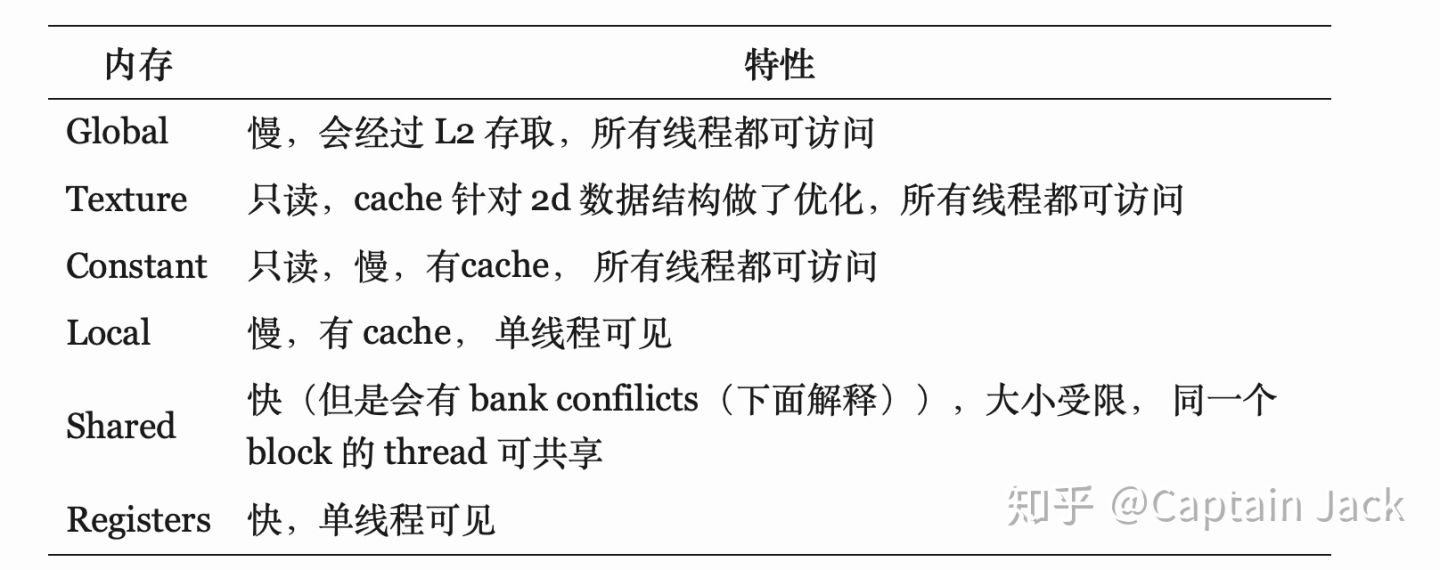
應該減少速度慢的局部、常量、紋理、全局內存的讀寫
-
減少bank conflict
共享內存是由多個bank組成,對于同一個bank的不同地址的讀寫會造成bank conflict
因此盡量讀寫共享內存的連續地址 -
減少wrap diverse
應該減少一個Packet中不同的局部單位進入不同的if分支的情況(這會造成局部單位阻塞)
為什么沒有提升FPS?
之前的Demo使用串行算法,而現在的Demo使用并行算法
如果都不使用traverse order優化(即判斷節點如果在射線的后面,則不遍歷它),則FPS提升了50%;
如果都使用traverse order優化,則FPS沒有變化;
這說明traverse order優化對于串行算法的提升更大。這是因為對于并行算法而言,只有當節點在一個Packet的所有射線的后面時,才不會遍歷節點(可以參考之前的提到的優化點1);
而對于串行算法而言,只要當節點在一條射線的后面,就不會遍歷節點
為什么不使用改進的Ranged traversal算法?
通過Large Ray Packets for Real-time Whitted Ray Tracing論文,得知現在的并行算法屬于文中提到的“Masked traversal”算法
文中還介紹了改進版的Ranged traversal算法,具體就是指一個Packet增加first active和last active標志,從而使一個Packet中只有first到last之間的射線進行相交檢測,減少了相交檢測的射線數量
但是這個算法應用到本文的并行算法中并不會提高FPS!因為本文的并行算法中的一個Packet至少會有一條射線會與葉節點進行相交檢測,所以根據之前提到的優化點1可知FPS不會提高
具體案例分析
現在我們對代碼進行一些具體的分析:
寄存器、共享、局部、全局內存分析
參考代碼與存儲的映射關系:
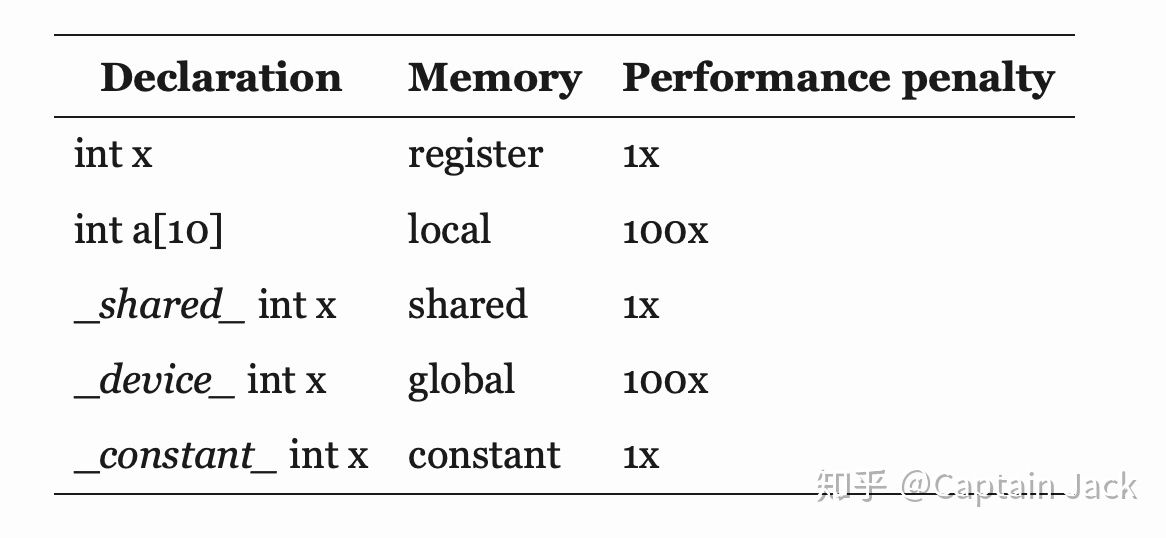
以及參考gpu cpu 共享內存 提高傳輸速度_GPU編程3--GPU內存深入了解,我們來分析下本文部分代碼中的內存使用情況:
fn _intersectScene(ray: Ray, LocalInvocationIndex : u32) -> RingIntersect {
//intersectResult是較大結構體,應該位于局部內存
var intersectResult: RingIntersect;
intersectResult.isClosestHit = false;
intersectResult.layer = 0;
//topLevel.topLevels是storage buffer數據,位于全局內存
//rootNode是較大結構體,應該位于局部內存
var rootNode = topLevel.topLevels[0];
//pointInScreen位于寄存器
var pointInScreen = ray.rayTarget;
if (LocalInvocationIndex == 0) {
//rayPacketAABBData位于共享內存
rayPacketAABBData[0] = pointInScreen.x;
rayPacketAABBData[1] = pointInScreen.y;
}
if (LocalInvocationIndex == 63) {
rayPacketAABBData[2] = pointInScreen.x;
rayPacketAABBData[3] = pointInScreen.y;
}
...
}
GPU Memory IO優化
根據之前提到的優化點2,我們知道應該減少GPU內存的讀寫,特別是全局內存的讀寫
我們來對照代碼分析一下全局內存讀寫的優化,看下面的代碼:
var rootNode = topLevel.topLevels[0];
...
if (LocalInvocationIndex == 1) {
stackSize = 1;
stackContainer[0] = rootNode;
}
這里一個Packet中所有局部單位都從全局內存中讀取第一個元素為rootNode,寫到本地內存中(這里進行了64次全局內存讀操作);
然后在1號局部單位中,從本地內存中讀取rootNode,寫到共享內存中
如果將代碼改為:
if (LocalInvocationIndex == 1) {
stackSize = 1;
stackContainer[0] = topLevel.topLevels[0];
}
那么就應該只進行1次全局內存讀操作,從而提高FPS
但是實際上卻降低了10%左右FPS,這是為什么呢?
這是因為GPU會將對全局內存同一地址或者相鄰地址的讀操作合并為一次操作(寫操作也是一樣),所以修改前后的代碼對全局內存的讀操作都是1次。
那么FPS應該不變,但為什么下降了呢?
這是因為在進行內存操作時,需要加上事務(進行鎖之類的同步操作)。如果一個wrap中的所有線程同時對全局內存的一個地址進行讀,則合并后的該次操作只需要一個事務;而如果是一個wrap中的部分線程進行讀,則合并后的該次操作需要更多的事務(如4個),從而需要更多時間開銷,降低了FPS
參考資料:
Nvidia GPU simultaneous access to a single location in global memory
初識事務內存(Transactional Memory)
我們再看下面的代碼:
else {
var child1Node = topLevel.topLevels[u32(currentNode.child1Index)];
var child2Node = topLevel.topLevels[u32(currentNode.child2Index)];
var child1NodeMaxLayer = _getMaxLayer(u32(child1Node.leafInstanceCountAndMaxLayer));
var child2NodeMaxLayer = _getMaxLayer(u32(child2Node.leafInstanceCountAndMaxLayer));
這里只需要一次合并后的讀操作,從全局內存中讀出child1Node、child2Node
如果代碼改為:
else {
var child1Node = topLevel.topLevels[u32(currentNode.child1Index)];
var child1NodeMaxLayer = _getMaxLayer(u32(child1Node.leafInstanceCountAndMaxLayer));
var child2Node = topLevel.topLevels[u32(currentNode.child2Index)];
var child2NodeMaxLayer = _getMaxLayer(u32(child2Node.leafInstanceCountAndMaxLayer));
因為要切換內存(全局和局部內存之間切換),所以就不能合并了,而需要二次全局內存的讀操作,分別讀出child1Node和child2Node,所以FPS會下降10%左右
parallel reduction優化并沒有提高FPS
下面的代碼使用了parallel reduction的優化版本來并行計算Packet中所有射線的最小layer:
if (LocalInvocationIndex < 32) {
_minForRayPacketRingIntersectLayer(LocalInvocationIndex, LocalInvocationIndex + 32);
}
workgroupBarrier();
if (LocalInvocationIndex < 16) {
_minForRayPacketRingIntersectLayer(LocalInvocationIndex, LocalInvocationIndex + 16);
}
workgroupBarrier();
if (LocalInvocationIndex < 8) {
_minForRayPacketRingIntersectLayer(LocalInvocationIndex, LocalInvocationIndex + 8);
}
workgroupBarrier();
if (LocalInvocationIndex < 4) {
_minForRayPacketRingIntersectLayer(LocalInvocationIndex, LocalInvocationIndex + 4);
}
workgroupBarrier();
if (LocalInvocationIndex < 2) {
_minForRayPacketRingIntersectLayer(LocalInvocationIndex, LocalInvocationIndex + 2);
}
workgroupBarrier();
關于parallel reduction優化可以參考啥是Parallel Reduction
優化后的代碼并不比下面的原始版本的代碼快:
for (var s: u32 = 1; s < 64; s = s * 2) {
if (LocalInvocationIndex % (2 * s) == 0) {
_minForRayPacketRingIntersectLayer(LocalInvocationIndex, LocalInvocationIndex + s);
}
workgroupBarrier();
}
估計是GPU幫我們優化了
wrap diverse優化
在之前使用串行算法的Demo代碼中,我們在遍歷葉節點包含的所有圓環時,加入了“如果找到了最前面的相交圓環,則退出葉節點的遍歷”的優化,相關代碼為:
if (_isLeafNode(leafInstanceCount)) {
...
while (leafInstanceCount > 0) {
...
if (_isPointIntersectWithAABB(point, bottomLevel.worldMin, bottomLevel.worldMax)) {
...
if (_isIntersectWithRing(point, instance, geometry)) {
if (!intersectResult.isClosestHit || layer > intersectResult.layer) {
...
if(layer == maxLayer){
break;
}
}
}
}
...
}
而在本文的使用并行算法的代碼,卻刪除了這個優化,FPS反而提升了10%。這是因為Packet中只有部分的局部單位會退出遍歷,造成其它局部單位阻塞等待
注:如果并行算法的代碼要加入這個優化,那也不能直接break,而是改為設置isBreak=true,在if中判斷isBreak,這樣才不會有同步的問題
bank conflict優化
現代顯卡實現了broadcast機制,從而對同一個bank的相同地址的讀寫不會造成bank conflict。但由于我的測試顯卡是老顯卡,還沒有該機制,所以在這種情況下會造成bank conflict
如下面代碼所示:
if (LocalInvocationIndex == 0) {
isAddChild1 = _isRayPacketAABBIntersectWithTopLevelNode(rayPacketAABBData, child1Node);
}
if (LocalInvocationIndex == 1) {
isAddChild2 = _isRayPacketAABBIntersectWithTopLevelNode(rayPacketAABBData, child2Node);
}
兩個局部單位同時讀共享變量rayPacketAABBData,從而造成bank conflict,FPS下降5%左右
參考資料
Large Ray Packets for Real-time Whitted Ray Tracing
Realtime Ray Tracing on GPU with BVH-based Packet Traversal
is early exit of loops on GPU worth doing?
issue while using break statement in cuda kernel
What's the mechanism of the warps and the banks in CUDA?
感謝您的閱讀~
掃碼加入我的QQ群:

掃碼加入免費知識星球-YYC的Web3D旅程:


 浙公網安備 33010602011771號
浙公網安備 33010602011771號