大學物理期末急救指北
更好的觀感?來我的網站趴!
剛體
平動和轉動的迅速溝通
| 質點 | 剛體 | |
|---|---|---|
| 運動方程 | \(F=ma\) | \(M=J\alpha\) |
| 動量/角動量 | \(p=mv\) | \(L=J\omega=mvr\) |
| 動量/角動量定理 | \(\int F\mathrm dt=\Delta p\) | \(\int M\mathrm dt=\Delta L\) |
| 動能 | \(E_k=\frac 12 mv^2\) | \(E_k=\frac 12 J\omega^2\) |
| 力/力矩做功 | \(W=\int F\mathrm dx\) | \(W=\int M\mathrm d\theta\) |
轉動慣量
質量分布離軸越遠,轉動慣量越大。空心物體比實心物體轉動慣量大。
常見物體的轉動慣量
| 形狀 | 轉動慣量 |
|---|---|
| 圓環(huán)、空心圓柱 | \(MR^2\) |
| 圓盤、實心圓柱 | \(\frac12 MR^2\) |
| 細桿(繞中點) | \(\frac 1{12} ML^2\) |
| 細桿(繞端點) | \(\frac 13 ML^2\) |
平行軸定理
剛體對于任意軸的轉動慣量=對于質心的轉動慣量+質量乘以兩個軸距離的平方
也就是換軸需要借助質心來換。
轉動定律
角加速度 \(a\) 正比于合外力矩 \(M=Fd\) ,反比于轉動慣量 \(J=mL^2\)。
剛體的角動量守恒
角動量
角動量定理
外力矩對時間的積累等于角動量的變化
角動量守恒定律
若外力矩為零,則角動量 \(L=J\omega\) 不變。
若剛體繞著光滑軸旋轉,無其他外力,則角動量守恒。
例:人質量m在半徑R的水平平臺邊緣,平臺可繞其中心的豎直光滑固定軸旋轉,轉動慣量為J。平臺和人靜止。突然人以相對地面為v的速率在邊緣逆時針轉動行走,求此視平臺對于地面旋轉角速度
角動量守恒,且為零。
解釋:角速度大小為 \(\frac{mvR}{J}\),方向與人行走方向相反。
剛體的動能
靜電場
電荷
電荷激發(fā)電場
孤立系統(tǒng)種總電荷量不變(正負電荷代數(shù)和不變)
庫倫定律
通常會令 \(k=\frac{1}{4\pi \varepsilon_0}\) 以簡寫,但是 \(\pi \varepsilon_0\)? 出現(xiàn)頻率挺高的。
\(\varepsilon_0\) 是真空中的電介質常數(shù),也稱為真空電容率,其值約為 \(8.85 \times 10^{-12}\) 法拉/米(F/m)。
多個點電荷則矢量疊加,帶電導體則積分。
場強:大小為單位電荷在該點受力的大小,方向為正電荷在該點受力方向。
點電荷的電場
連續(xù)分布的帶電體
其中
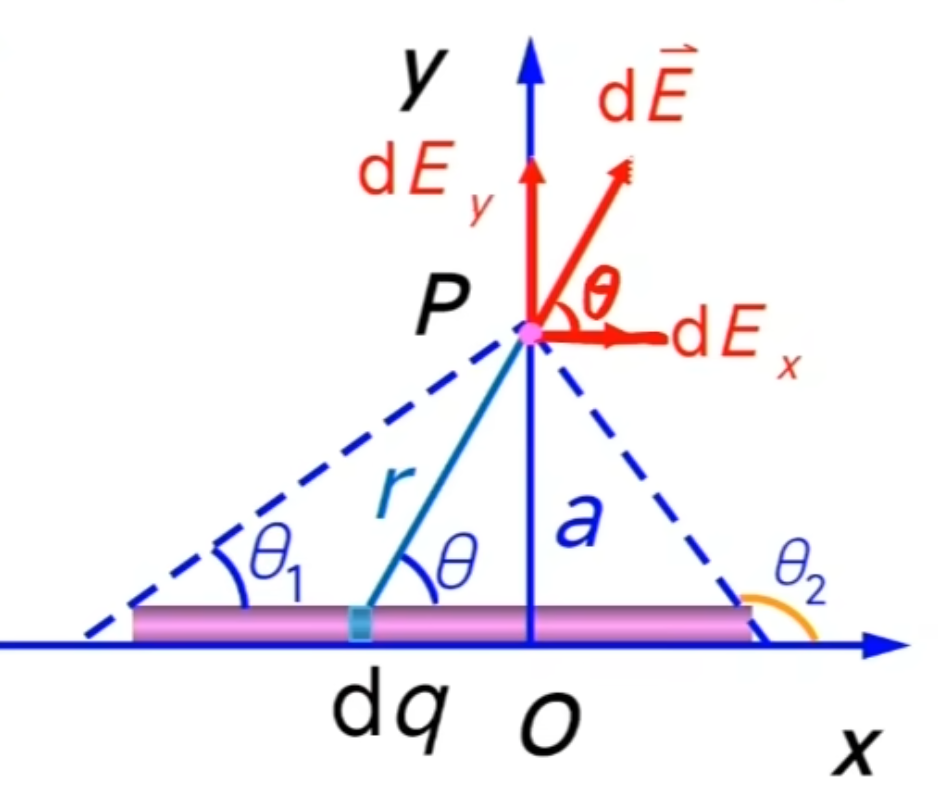
例:長為L的均勻帶電直桿,電荷線密度為\(\lambda\),求其在空間一點P產生的電場強度,P到桿的垂直距離為a
 $$
\begin{gather}
\mathrm dq=\lambda \mathrm dx\\
\mathrm dE=\frac{1}{4\pi \varepsilon_0}\frac{\lambda\mathrm dx}{r^2}\\
\mathrm dE_x=\mathrm dE\cos\theta\\
\mathrm dE_y=\mathrm dE\sin\theta\\
x=a\tan(\theta-\frac{\pi}{2})=-a\cot\theta\\
\mathrm dx=a\csc^2\theta \mathrm d\theta\\
\nonumber\\
E_x=\int \mathrm dE_X=\int_{\theta_1}^{\theta_2}\frac{\lambda}{4\pi \varepsilon_0a}\cos\theta\mathrm d\theta\\
=\frac{\lambda}{4\pi\varepsilon_0a}(\sin\theta_2-\sin\theta_1)\\
\nonumber\\
E_y=\frac{\lambda}{4\pi\varepsilon_0a}(\cos\theta_2-\cos\theta_1)
\end{gather}
$$
*考試一般不考這種復雜的、位置不確定的。*
$$
\begin{gather}
\mathrm dq=\lambda \mathrm dx\\
\mathrm dE=\frac{1}{4\pi \varepsilon_0}\frac{\lambda\mathrm dx}{r^2}\\
\mathrm dE_x=\mathrm dE\cos\theta\\
\mathrm dE_y=\mathrm dE\sin\theta\\
x=a\tan(\theta-\frac{\pi}{2})=-a\cot\theta\\
\mathrm dx=a\csc^2\theta \mathrm d\theta\\
\nonumber\\
E_x=\int \mathrm dE_X=\int_{\theta_1}^{\theta_2}\frac{\lambda}{4\pi \varepsilon_0a}\cos\theta\mathrm d\theta\\
=\frac{\lambda}{4\pi\varepsilon_0a}(\sin\theta_2-\sin\theta_1)\\
\nonumber\\
E_y=\frac{\lambda}{4\pi\varepsilon_0a}(\cos\theta_2-\cos\theta_1)
\end{gather}
$$
*考試一般不考這種復雜的、位置不確定的。*
帶電桿的較遠處的場強
桿可以看成點電荷,\(\theta_1=\theta_2\),所以有
無限長直導線場強
\(\theta_1=0,\theta_2=180^\circ\)
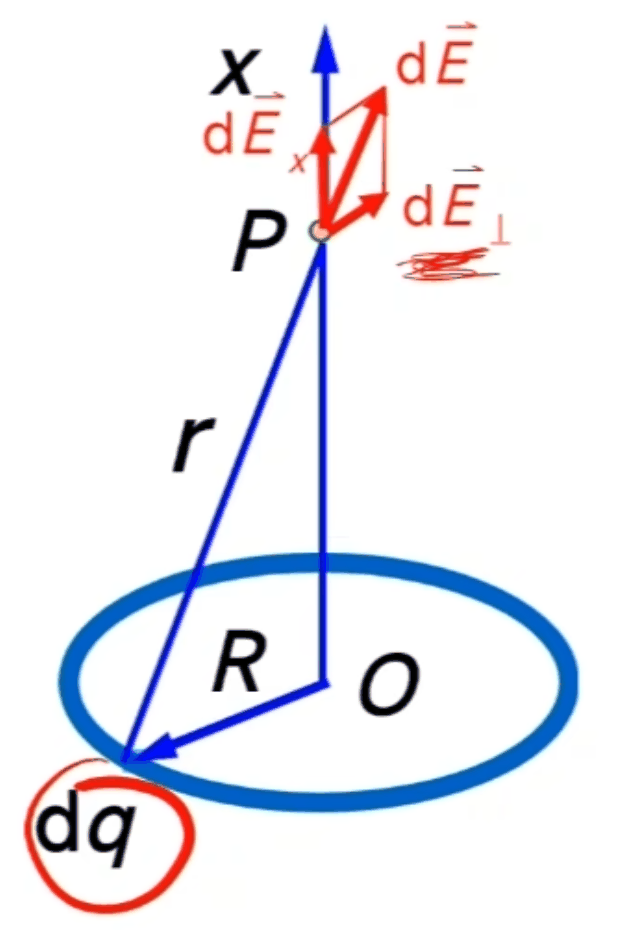
例:半徑為R的均勻帶電圓環(huán),帶電量q。求圓環(huán)周先上任意一點P的電場強度
 $$
\begin{gather}
\mathrm dq=\lambda \mathrm dl\\
\mathrm dE=\frac{1}{4\pi \varepsilon_0}\frac{\mathrm dq}{r^2}\\
\mathrm dE_\perp=0(對稱性)\\
\mathrm dE_x=\mathrm dE\cos \theta
\end{gather}
$$
$$
\begin{gather}
\mathrm dq=\lambda \mathrm dl\\
\mathrm dE=\frac{1}{4\pi \varepsilon_0}\frac{\mathrm dq}{r^2}\\
\mathrm dE_\perp=0(對稱性)\\
\mathrm dE_x=\mathrm dE\cos \theta
\end{gather}
$$
帶電圓環(huán)在圓心處場強
\(E=0\)
帶電圓環(huán)在無窮遠處場強
\(x\gg R\),可以將圓環(huán)視作點電荷,\(E=\frac1{4\pi\varepsilon_0}\frac{q}{x^2}\)?
例:面密度為\(\sigma\)的圓板在軸線上任一點的電場強度
之前是\(\mathrm dq\)在\(L\)上積分,所以\(\mathrm dq=\lambda \mathrm dl\)
在板子上,是以一個環(huán)作為一個小量進行積分。
每個小環(huán)=環(huán)的周長乘以環(huán)的寬度\(\mathrm dr\)
或者,\(\mathrm dq=\sigma\mathrm dS=\sigma\mathrm d(\pi r^2)\),本質上是一樣的。
電場線與電通量
- 由正電荷指向負電荷或無窮遠處
- 切線反映方向,疏密反映場強大小
- 非閉合曲線
- 不相交
電通量:穿過曲面S的電場線條數(shù)
非均勻場:對S積分
高斯定理
穿過閉合曲面的電通量在數(shù)值上等于曲面內包圍的電量的代數(shù)和乘以\(\frac1{\varepsilon_0}\)
例:均勻帶電球面,總電量Q,半徑R。求某點處E
對于球面外一點P:
取過P的同心求面為高斯面,表面積\(4\pi r^2\)。對于高斯面上每一個dS,都會有大小為E的場強穿過。
由于電荷在球面上分布,內部無電荷,所以 \(r<R\) 時 \(E=0\)。
帶電量為q的球體半徑為R,電荷體密度為\(\rho\)。求某點處E
\(r>R\) 時,同上;
\(r<R\) 時,\(E\not=0\)。只有\(\le r\)部分的電荷有作用:
無限大均勻帶電板上電荷面密度為\(\rho\),求E分布
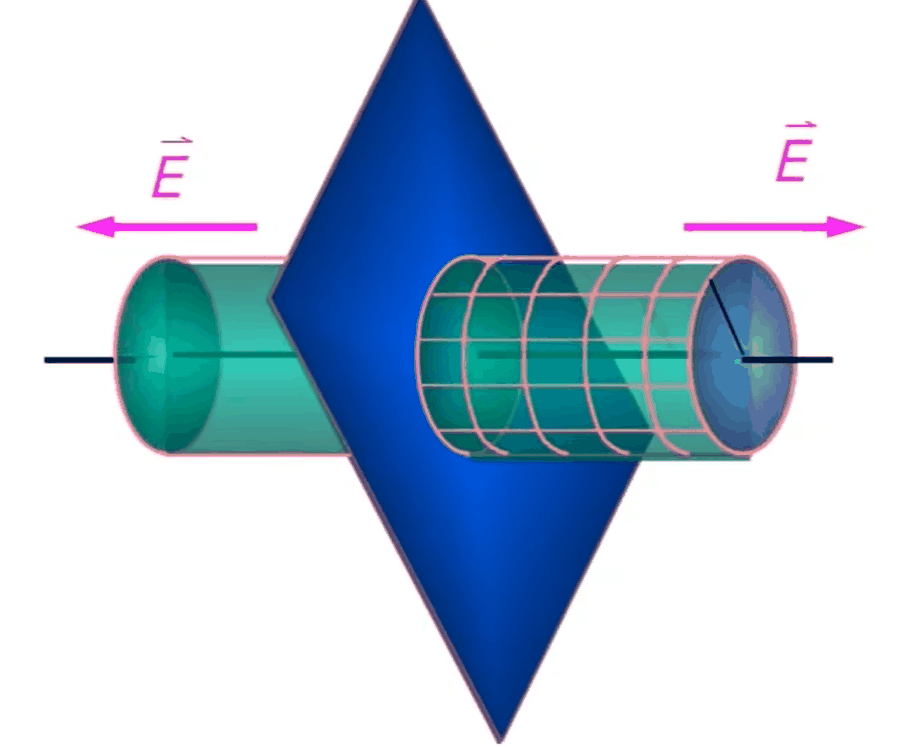
如上圖選取高斯面
電勢
單位正電荷從該點移動到勢能零點過程中,電場力做的功。
點電荷的電勢
電容
例:將平行電容板充電后與電源斷開,將其\(d\)拉大,問電勢差\(U_{12}\)、電場強度\(E\)、電場能量\(W\)的變化
電源斷開,所以\(Q\)不變
恒定磁場
電流強度
是一個標量,但是為了電路處理方便,規(guī)定正電荷移動方向是電流方向。
磁感應強度
小磁針在磁場中,北極N的指向為 \(\vec B\) 的方向。
畢薩定律
大小
方向:右手螺旋定則,從 \(I\mathrm d\vec l\) 握到 \(\vec r_0\),也可以大拇指順電流手握導線。
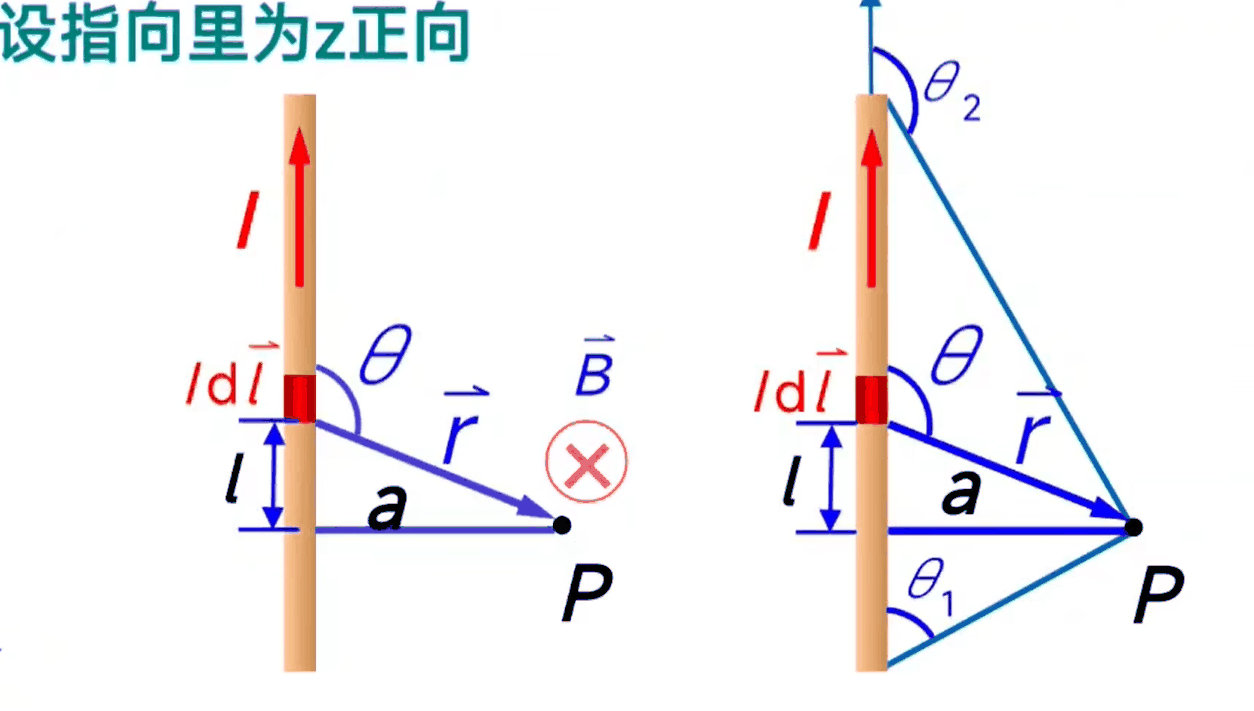
載流直導線的磁場
求距離載流直導線為a處的一點P的磁感應強度\(\vec B\)
 $$
\begin{gather}
\mathrm dB=\frac{\mu_0}{4\pi}
\frac{I\mathrm dl\sin\theta}{r^2}\\
r=a\csc\theta\\
l=a\cot(\pi-\theta)=-a\cot\theta\\
\mathrm dl=a\csc^2\theta\mathrm d\theta\\
B_z=B=\int\frac{\mu_0}{4\pi}
\frac{I\mathrm dl\sin\theta}{r^2}=\frac{\mu_0I}{4\pi a}(\cos\theta_1-\cos\theta_2)
$$
\begin{gather}
\mathrm dB=\frac{\mu_0}{4\pi}
\frac{I\mathrm dl\sin\theta}{r^2}\\
r=a\csc\theta\\
l=a\cot(\pi-\theta)=-a\cot\theta\\
\mathrm dl=a\csc^2\theta\mathrm d\theta\\
B_z=B=\int\frac{\mu_0}{4\pi}
\frac{I\mathrm dl\sin\theta}{r^2}=\frac{\mu_0I}{4\pi a}(\cos\theta_1-\cos\theta_2)
\end{gather}
\begin{gather}
B=\frac{\mu_0I}{2\pi a}
\end{gather}
\begin{gather}
\mathrm dB=\frac{\mu_0I\mathrm dl}{4\pi r^2}=\frac{\mu_0I\mathrm dl}{4\pi(R2+x2)}\
B_\perp=0\
B=\int\mathrm dB\cos\theta=\int\frac{\mu_0}{4\pi}\frac{I\mathrm dl}{r^2}\cos\theta\
=\int\frac{\mu_0}{4\pi}\frac{I\mathrm dl}{r^2}\frac Rr=\frac{\mu_0IR}{4\pi(R2+x2)^\frac 32}2\pi R\
=\frac{\mu_0IR2}{2(R2+x2)\frac32}
\end{gather}
\begin{gather}
B=\frac{\mu_0I}{2R}
\end{gather}
\begin{gather}
B=\frac{\mu_0I}{2R}\cdot\frac{\phi}{2\pi}
\end{gather}
\begin{gather}
\sigma=\frac{q}{\pi R^2}\
\mathrm dq=\sigma\cdot2\pi r\mathrm dr\
\mathrm dI=\frac{\mathrm dq}{\mathrm dt}=\frac{\sigma\cdot2\pi r\mathrm dr}{2\pi\omega}=\omega \sigma r\mathrm dr\
\mathrm dB=\frac{\mu_0r^2\mathrm dI}{2(r2+x2)^\frac32}\
=\frac{\mu_0\sigma\omega r^3\mathrm dr}{2(r2+x2)^\frac32}\
B=\frac{\mu_0\sigma\omega}2[\frac{R2+2x2}{\sqrt{x2+R2}}-2x]
\end{gather}
\begin{gather}
\phi_m=\oint_S\vec B\cdot\mathrm d\vec S=0
\end{gather}
\begin{gather}
\oint_L\vec B\cdot \mathrm d\vec l=\mu_0I
\end{gather}
\begin{gather}
\mathrm dF=I\mathrm d\vec l\times \vec B
\end{gather}
\begin{gather}
B_1=\frac{\mu_0I_1}{2\pi a}\
(單位長度受到的作用力)f_{12}=I_{2}B_1=\frac{\mu_0I_1I_2}{2\pi a}
\end{gather}
\begin{gather}
\vec f_m=q\vec v\times \vec B
\end{gather}
\begin{gather}
f_m=qvB=\frac{BI}{nS}
\end{gather}
\begin{gather}
qvB\sin\frac\pi2=m\frac{v^2}{R}\
R=\frac{mv}{qB}\
T=\frac{2\pi R}{v}=\frac{2\pi m}{qB}\
f=\frac{qB}{2\pi m}
\end{gather}
\begin{gather}
\phi=\int\vec B\cdot\mathrm d\vec S\
\varepsilon=-\frac{\mathrm d\phi}{\mathrm dt}
\end{gather}
\begin{gather}
I_i=\frac \varepsilon R=-\frac{\mathrm d\phi}{R\mathrm dt}=\frac{\mathrm dq_i}{\mathrm dt}\
感應電荷q_i=\int_{t_1}^{t_2}-\frac1R\mathrm d\phi=\frac{\phi_1-\phi_2}R
\end{gather}
\begin{gather}
B=\frac{\mu_0I}{2r_2}
\end{gather}
\begin{gather}
\phi=\vec B\cdot \vec S=\frac{\mu_0I}{2r_2}\pi r_1^2cos\omega t
\end{gather}
\begin{gather}
\varepsilon=-\frac{\mathrm d\phi}{\mathrm dt}=\frac{\mu_0I\pi r_1^2\omega}{2r_2}\sin\omega t
\end{gather}
\begin{gather}
\mathrm d\phi=B\mathrm dS=\frac{\mu_0I}{2\pi x}b\mathrm dx\
\phi=\int_L^{L+a}\mathrm d\phi\
=\frac{\mu_0Ib}{2\pi}\int_L^{L+a}\frac{\mathrm dx}x\
=\frac{\mu_0Ib}{2\pi}\ln\frac{L+a}{L}\
L=vt,\mathrm dL=v\mathrm dt\
\varepsilon=-\frac{\mathrm d\phi}{\mathrm dt}=-\frac{\mu_0Ib}{2\pi}[\frac{\frac{\mathrm dL}{\mathrm dt}}{L+a}-\frac
{\frac{\mathrm dL}{\mathrm dt}}{l}]\
=\frac{\mu_0Iabv}{2\pi L(L+a)}
\end{gather}
\begin{gather}
\vec f=-e(\vec v\times \vec B)
\end{gather}
\begin{gather}
\vec E_k=\frac{\vec F_k}{-e}=\vec v\times \vec B\
\varepsilon_i=\int_-^+\vec E_k\cdot \mathrm d\vec l=\int_-^+(\vec v\times \vec B)\cdot \mathrm d\vec l
\end{gather}
\begin{gather}
\varepsilon_i=\int_O^A(v\times B)\cdot \mathrm dl\
=\int_0^R l\omega B\mathrm dl\
=\frac{BR^2}{2}\omega
\end{gather}
\begin{gather}
\mathrm d\phi=B\cdot\frac12 R^2\mathrm d\theta\
\varepsilon_i=\frac{\mathrm d\phi}{\mathrm dt}=\frac12 BR^2\frac{\mathrm d\theta}{\mathrm dt}=\frac12BR^2\omega
\end{gather}
\begin{gather}
\oint_L\vec E_v\cdot \mathrm d\vec l=-\int_S\frac{\partial \vec B}{\partial t}\cdot \mathrm d\vec S
\end{gather}

 浙公網安備 33010602011771號
浙公網安備 33010602011771號