
IR2104詳解
目錄
引入:IR2104是我上手的第一個半橋柵極驅動芯片,使用兩片IR2104就可以搭建一個全橋電路控制電機的正反轉。然而由于不懂其中原理,在后續電路設計中出現了許多bug,這篇文章作為一個經驗總結,也作為一個新手教程,從MOS管的工作原理深入講解IR2104電路設計。
0、基礎知識
IR2104是一顆半橋柵極驅動芯片(控制 構成半橋的MOS管的柵極的芯片),所以在介紹IR2104之前,我們先了解一下MOS管和半橋是什么。
0.1、NMOS原理
關于MOS管的介紹,推薦B站工科男孫老師的視頻 NMOS的介紹
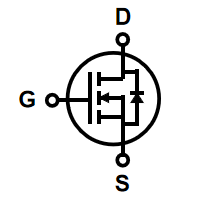
這里僅簡單介紹一下,NMOS有三個引腳,分別為G(柵極)、S(源極)、D(漏極),當DS之間有電勢差且GS間電壓大于開啟電壓Vth時,NMOS完全導通。用公式表示就是Vgs > Vth。
可以簡單理解為:當 G(柵極)電壓 大于 S(源極)電壓 時,NMOS導通。
0.2、半橋控制原理
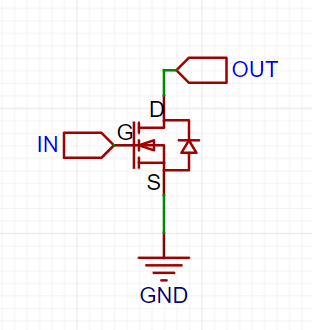
一個NMOS構成的開關電路(如下圖)只能輸出低電平或高阻態(稱為開漏輸出),不能輸出高電平。
于是我們再接入一個NMOS來控制高電平的接入(如下圖)。
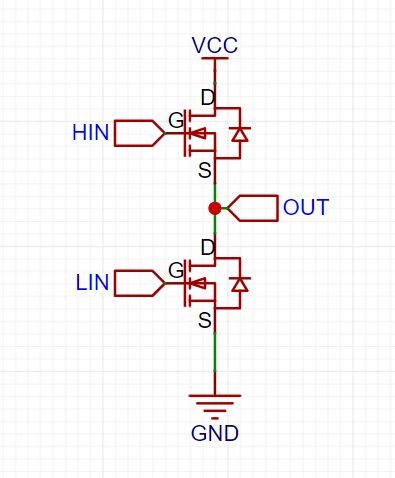
這時我們將連接高電平的MOS叫上管,連接低電平的MOS叫下管,通過控制上下管的導通,就可以控制高低電平的輸出。
HIN=1、LIN=0 時,上管導通下管截止,輸出高電平;
HIN=0、LIN=1 時,上管截止下管導通,輸出低電平;
HIN=0、LIN=0 時,上管截止下管截止,輸出高阻態;
HIN=1、LIN=1 時,上下管均導通,短路!!!。
看起來這個電路很完美,但需要注意的是,要控制上管導通,需要VHIN > Vout,而在上管導通時,Vout≈Vcc,也就是說,VHIN需要大于Vcc才能使上管導通,如何獲取一個大于Vcc的電壓是第一個問題。在MOS開關過程中,如何防止短路的發生是第二個問題。
幸運的是,上面兩個問題都可以通過使用柵極驅動芯片來解決,下面我們就進入正題—IR2104芯片。
(請牢記上面的兩個問題)
1、IR2104簡介
IR2104 是一款高壓、高電流、半橋驅動器,用于驅動功率 MOSFET 和 IGBT。內部集成死區控制電路和shutdown功能。
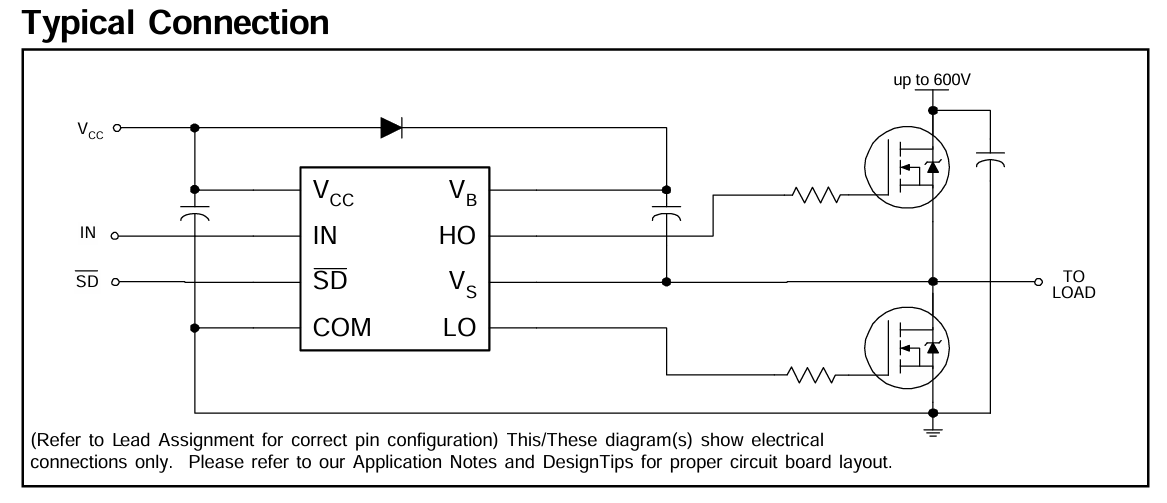
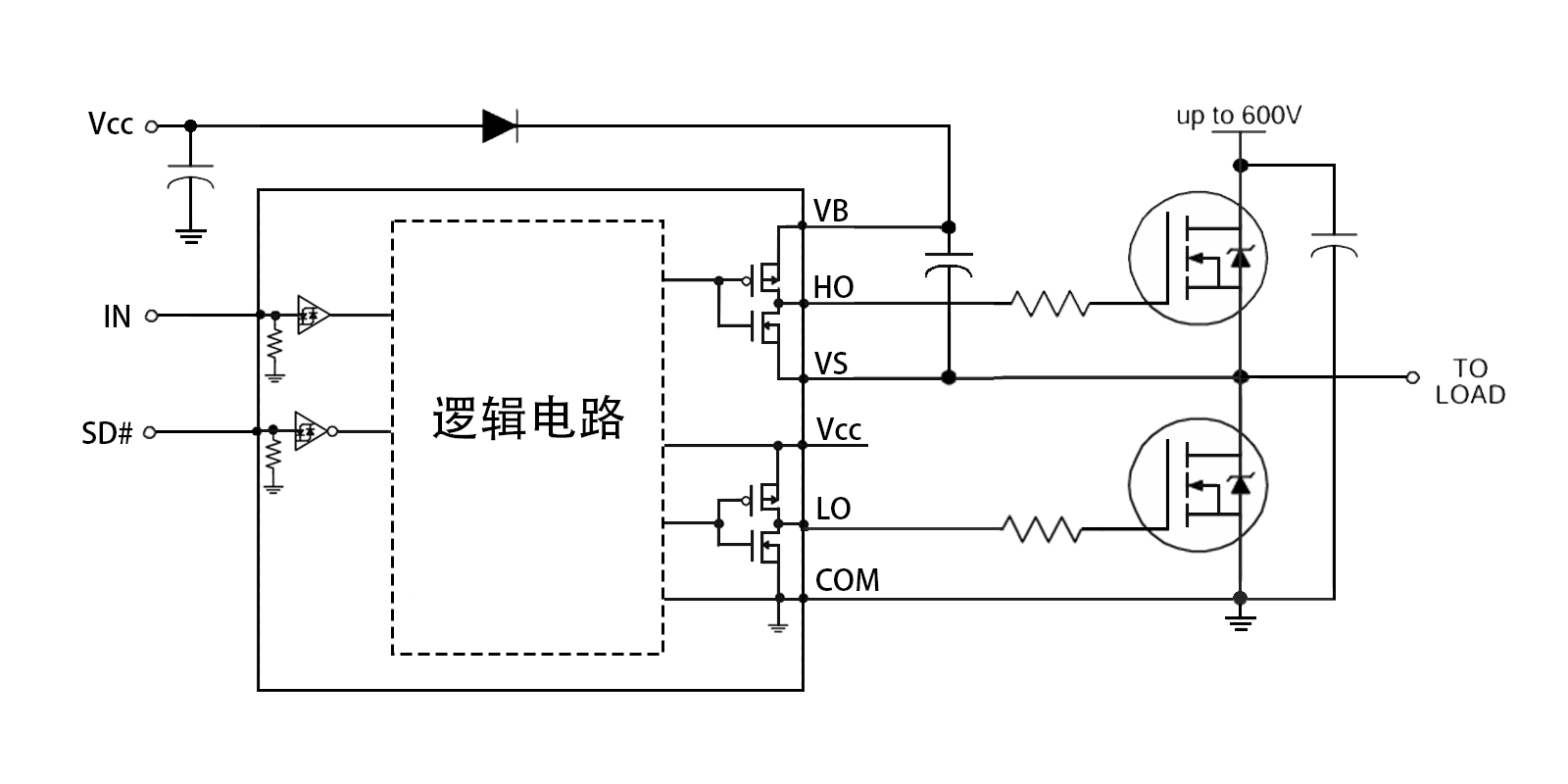
1.1、示例電路
1.2、引腳定義
| 序號 | 引腳縮寫 | Description | 引腳功能 |
|---|---|---|---|
| 2 | IN | Logic input for gate driver outputs (HO and LO), in phase with HO |
邏輯輸入,控制HO和LO引腳的輸出, 與HO同相位 |
| 3 | SD# | Logic input for shutdown | 邏輯輸入,低電平芯片停止工作 |
| 8 | Vb | High side floating supply | 高端浮動供電 |
| 7 | HO | High side gate drive output | 高端柵極驅動輸出 |
| 6 | Vs | High side floating supply return | 高端浮動供電回流 |
| 1 | Vcc | Low side and logic fixed supply | 低端固定供電,邏輯電路供電 |
| 5 | LO | Low side gate drive output | 低端柵極驅動輸出 |
| 4 | COM | Low side return | 低端回流,公共地 |
引腳可以分為兩類
- 邏輯引腳
- IN引腳控制柵極驅動引腳HO和LO的輸出,且HO電平與IN相同,LO電平與IN相反
- SD#引腳控制芯片工作與否,“#”表示低電平有效,即SD為低電平時芯片停止工作
- 驅動引腳
- VB/HO/VS 可看作一組驅動引腳,驅動高端NMOS
- Vcc/LO/COM 是一組驅動引腳,驅動低端NMOS
在引腳的英文釋義中,出現了 floating 和 fixed 兩個單詞,意為“浮動”和“固定”,分別描述了高端和低端的驅動引腳。
此處點出,后文解釋。
2、電路原理詳解
還記得開頭的兩個關鍵問題嗎,來回顧一下
- 第一個問題:如何獲取一個大于Vcc的電壓
- 第二個問題:如何防止短路的發生
解決這兩個問題的方法對應兩個新的名詞—自舉升壓、死區控制
在學習它們之前,我們先搞一個圖,便于分析芯片內外電路的工作過程(如下圖)
2.1、自舉升壓
自舉,顧名思義就是自己把自己舉起來,主要通過一個電容和一個二極管來實現。
先做一個小實驗,現在有一個5V電源和一個電解電容,將電源與電容并聯,此時電容充電,兩端電壓等于5V;在將電容取下,將電容的負極與電源正極連接,測量電源負極與電容正極之間的電壓。可以看到測量結果為10V。
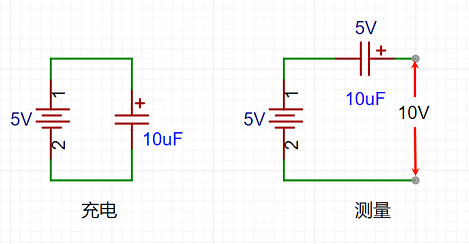
這就是自舉的含義,將自己的能量先聚集到電容,再將能量疊加,實現電壓的升高。
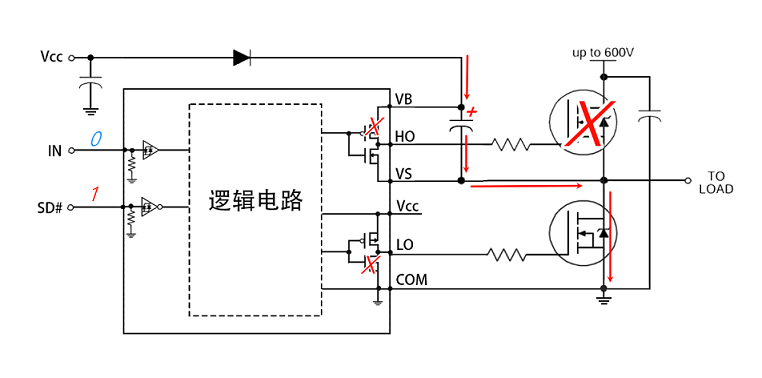
我們來看一下自舉電路實際中的工作過程。(注:HO,LO的輸出也是由內部mos控制的)
-
當IN輸入0時,LO與Vcc導通,下管導通;HO與VS導通,上管截止。同時電流從Vcc經二極管向自舉電容充電。
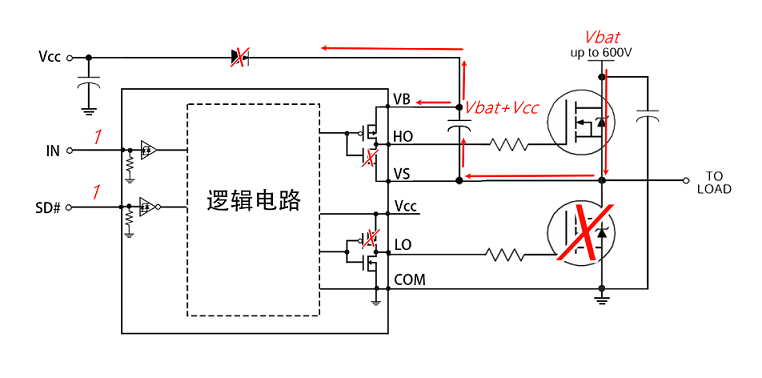
-
當IN輸入1時,LO與COM導通,下管截止;HO與VB導通,此時自舉電容正極相當于連接HO,電容正極電壓=Vbat+Vcc,同時二極管防止了電流倒灌回Vcc,上管得以導通。
但這并不是一勞永逸的(一次充電,終身導通),自舉電容的容值取決于電路的控制頻率和NMOS的柵源電容,所以不會很大,且驅動mos時會有些許漏電,所以需要不斷的重復上述過程給電容充放電才可以維持mos的導通電壓。
下面我們再來做一個實驗,取一個IR2104模塊,上電后給IN輸入高電平,會發現上管輸出只能維持一小段時間,需要IN輸入低電平后再次給高電平才能恢復上管的導通。
上文的兩個英語單詞(floating、fixed)在這里可以解釋一下了。
- floating 意為浮動,很形象地描述了上管的驅動供電,自舉電容就像一條小船,其正極電壓跟隨Vbat水漲船高,飄忽不定,表示一種不確定性。
- fixed 意為固定,與floating對比就很好理解了,下管的驅動供電是Vcc,固定不變。
2.2、死區控制
死區,顧名思義“死掉的區間”。
為了防止控制過程中上下管MOS同時導通,芯片內部為控制輸出信號添加了“死區”,即兩個MOS均不導通的區間。
不添加死區的波形圖長這樣

添加死區的波形圖長這樣
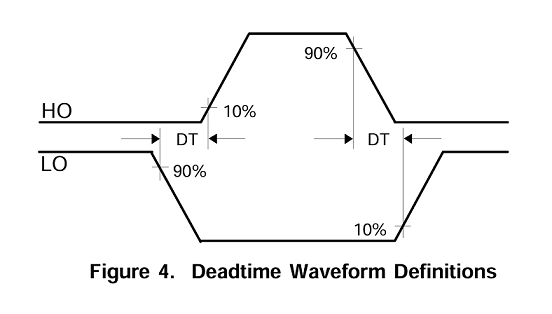
可見無死區時,半橋在切換輸出狀態時,上下管會同時處于不完全導通狀態。這種現象輕則影響輸出不穩定、功耗增加,重則導致mos發熱甚至短路燒毀。
而加入死區后,半橋在切換輸出狀態時,會先確保上下管均處于截止狀態,之后在進行切換。
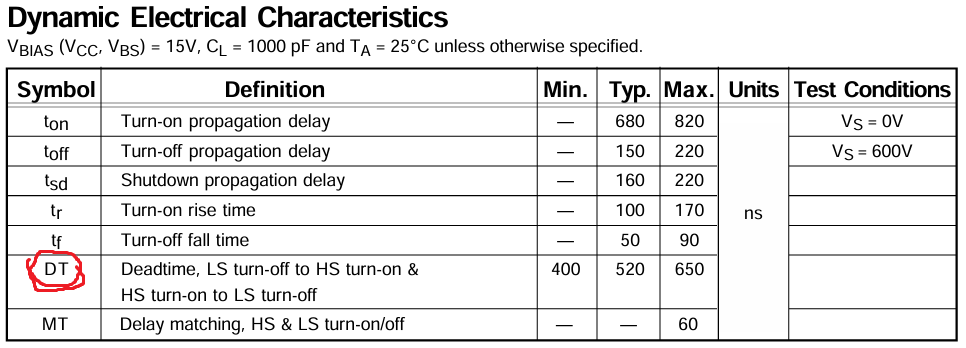
結合下圖數據表可知,DT的取值在400~650ns之間,這個參數可以作為MOS選型的依據。
MOS管的內電容是指溝道和柵極之間的電容,而外電容則是指溝道和外部環境之間的電容。這兩個電容在切換過程中會影響電荷傳輸速度,從而對死區時間產生影響。一般來說,較大的內外電容會導致更長的死區時間,而較小的內外電容則會縮短死區時間。因此,在設計MOS管電路時,我們應盡量減小內外電容的大小,以減小死區時間。——from百度文庫
3、總結
OK,至此,你已經掌握了IR2104的關鍵知識點,我們來整理一下
- 首先,IR2104是一顆半橋驅動芯片,而半橋是由兩顆NMOS構成的,所以我們先了解了NMOS的導通條件 和 半橋的控制原理。但是控制過程遇到了兩個問題,上管導通所需的高電壓和控制過程的防短路。
- 之后,在這兩個問題的基礎上,我們在IR2104上找到了對應對解決方案,自舉升壓 和 死區控制,明白了使用柵極驅動芯片的原因和必要性。
- 最后,其實這篇文章里還有諸多問題沒有深入講解,如自舉電容的容值、限流電阻的阻值以及如何搭建靠譜的電機驅動電路,這些就在下一篇(wait for me)。
作者
博客園@L-Q

 浙公網安備 33010602011771號
浙公網安備 33010602011771號