常用的注意力機制模塊(SE、CBAM)
【深度學習】總目錄
SE論文:《Squeeze-and-Excitation Networks》將重點放在了通道(channel)關系上,并提出了一種新的結構單元SE block。將SE block堆疊在一起,就形成了SENet。SE塊略微增加計算成本但顯著地提升了性能,并且即插即用。SENet獲得了最后一屆ImageNet 2017競賽分類任務的冠軍。
CBAM論文:《Convolutional Block Attention Module》論文(2018年)提出了一種輕量的注意力模塊CBAM,可以在通道和空間維度上進行 Attention 。
1 SE模塊
卷積神經網絡建立在卷積運算的基礎上,通過融合局部感受野內的空間信息和通道信息來提取信息特征。為了提高網絡的表示能力,許多現有的工作通過在空間維度上對網絡的性能進行了提升,比如Inception模塊中嵌入多尺度處理來提高準確度,Spatial Transformer Networks(STN)結合空間注意力機制。本文與這些方法相反,專注于通道,并提出了一種新穎的架構單元“Squeeze-and-Excitation”(SE)模塊,通過顯式地建模通道之間的相互依賴關系,自適應地重新校準通道式的特征響應。具體來說,就是通過學習的方式來自動獲取每個通道的重要程度,然后依照這個重要程度去提升有用的特征并抑制對當前任務用處不大的特征。
Squeeze-and-Excitation Module
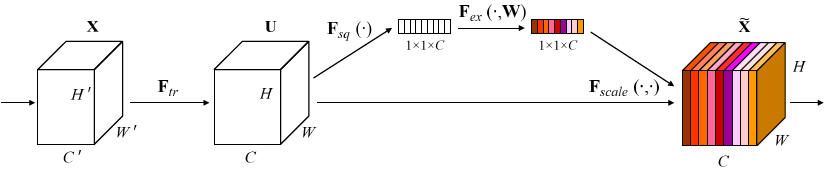
給定一個輸入x,其特征通道數為c1,通過一系列卷積等一般變換后得到一個特征通道數為c2的特征。接下來通過SE模塊的三個操作來重標定前面得到的特征:
1)Squeeze(壓縮)。沿著空間維度壓縮特征,將每個通道的二維的特征變成一個實數,可以理解為對每個 channel 的特征信息的進行融合,這個實數某種程度上具有全局的感受野,并且輸出的維度和輸入的特征通道數相匹配。它表征著在特征通道上響應的全局分布,而且使得靠近輸入的層也可以獲得全局的感受野,這一點在很多任務中都是非常有用。采用全局平局池化來實現,輸出維度為1x1xC。
2)Excitation(激勵)。得到Squeeze的1x1xC全局特征后,通過全連接層對每個通道的重要性進行預測。它是一個類似于循環神經網絡中門的機制。通過參數來為每個特征通道生成權重,其中參數被學習用來顯式地建模特征通道間的相關性。為了減少通道個數從而降低計算量,設置了縮放參數SERatio。 第一個全連接層有C*SERatio個神經元,輸入為1×1×C,輸出1×1×C×SERadio,起到降維作用。 第二個全連接層有C個神經元,輸入為1×1×C×SERadio,輸出為1×1×C。
3)Scale(縮放)。將Excitation的輸出的權重看做是經過特征選擇后的每個特征通道的重要性,然后通過乘法逐通道加權到先前的特征上,完成在通道維度上的對原始特征的重標定。
SE模塊的代碼實現(pytorch)
from torch import nn
class SELayer(nn.Module):
def __init__(self, channel, reduction=16):
super(SELayer, self).__init__()
self.avg_pool = nn.AdaptiveAvgPool2d(1)
self.fc = nn.Sequential(
nn.Linear(channel, channel // reduction, bias=False),
nn.ReLU(inplace=True),
nn.Linear(channel // reduction, channel, bias=False),
nn.Sigmoid()
)
def forward(self, x):
b, c, _, _ = x.size()
y = self.avg_pool(x).view(b, c)
y = self.fc(y).view(b, c, 1, 1)
return x * y.expand_as(x)
2 CBAM模塊
CBAM(Convolutional Block Attention Module)是一種輕量的注意力模塊,給定一個中間特征圖,我們的模塊會沿著兩個獨立的維度(通道和空間)依次推斷注意力圖,然后將注意力圖乘以輸入特征圖以進行自適應特征修飾。 由于CBAM是輕量級的通用模塊,因此可以以可忽略的開銷將其無縫集成到任何CNN架構中,并且可以與基礎CNN一起進行端到端訓練。 論文在 ResNet 和 MobileNet 等經典結構上添加了 CBAM 模塊并進行對比分析,同時也進行了可視化,發現 CBAM 更關注識別目標物體,這也使得 CBAM 具有更好的解釋性。

2.1 Channel Attention Module(CAM)
通道上的Attention模塊以及具體計算如下圖所示:
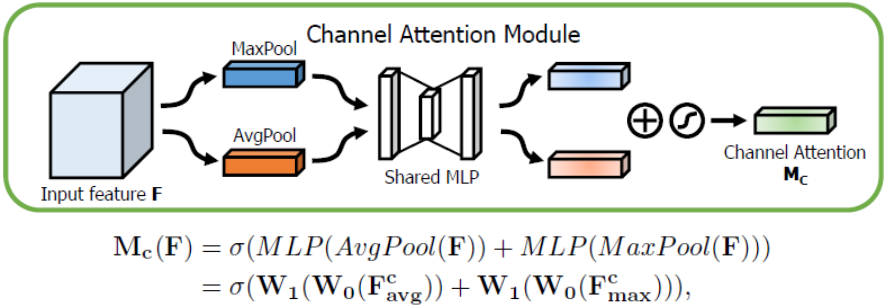
將輸入的特征圖F(H×W×C)分別經過global max pooling(全局最大池化)和global average pooling(全局平均池化),得到兩個1×1×C的特征圖,接著,再將它們分別送入一個兩層的神經網絡(MLP),第一層神經元個數為 C/r(r為減少率),激活函數為 Relu,第二層神經元個數為 C,這個兩層的神經網絡是共享的。而后,將MLP輸出的特征進行基于element-wise的加和操作,再經過sigmoid激活操作,生成最終的channel attention feature,即M_c。最后,將M_c和輸入特征圖F做element-wise乘法操作,生成Spatial attention模塊需要的輸入特征。
實驗:AvgPool & MaxPool

在channel attention中,表1對于pooling的使用進行了實驗對比,發現avg & max的并行池化的效果要更好。這里也有可能是池化丟失的信息太多,avg&max的并行連接方式比單一的池化丟失的信息更少,所以效果會更好一點。
2.2 Spatial Attention Module(SAM)
空間上的Attention模塊以及具體計算如下圖所示:
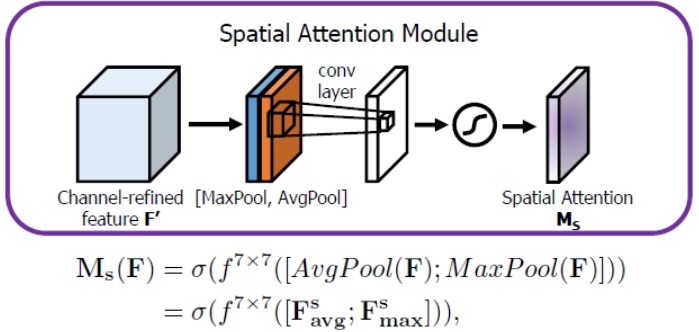
將Channel attention模塊輸出的特征圖F’作為本模塊的輸入特征圖。首先做一個基于channel的global max pooling 和global average pooling,得到兩個H×W×1 的特征圖,然后將這2個特征圖基于channel做concat操作(通道拼接)。然后經過一個7×7卷積(7×7比3×3效果要好)操作,降維為1個channel,即H×W×1。再經過sigmoid生成spatial attention feature,即M_s。最后將該feature和該模塊的輸入feature做乘法,得到最終生成的特征。
實驗:Comparison of different spatial attention methods
使用channel-pooling(沿著通道維度進行平均和最大池化)的同時,使用大kernel size=7效果最好。
2.3 CAM和SAM的組合形式
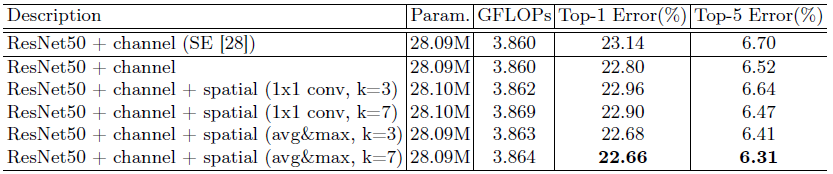
通道注意力和空間注意力這兩個模塊能夠以并行或者串行順序的方式組合在一塊兒,關于通道和空間上的串行順序和并行作者進行了實驗對比,發現先通道再空間的結果會稍微好一點。具體實驗結果如下:
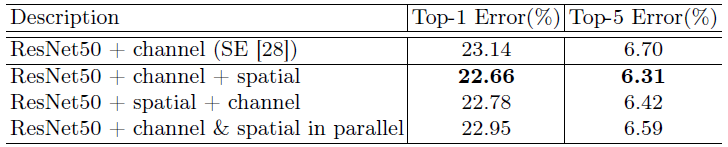
從表中可以看出,在ResNet50的基準架構上,兩個attetnion子模塊的連接順序里面的確是channel + spatial的要更好一些,也要好于標準的SENet的通道attention。
3 Grad-CAM可視化
論文:Grad-CAM: Visual Explanations from Deep Networks via Gradient-based Localization
博客:Grad-CAM簡介
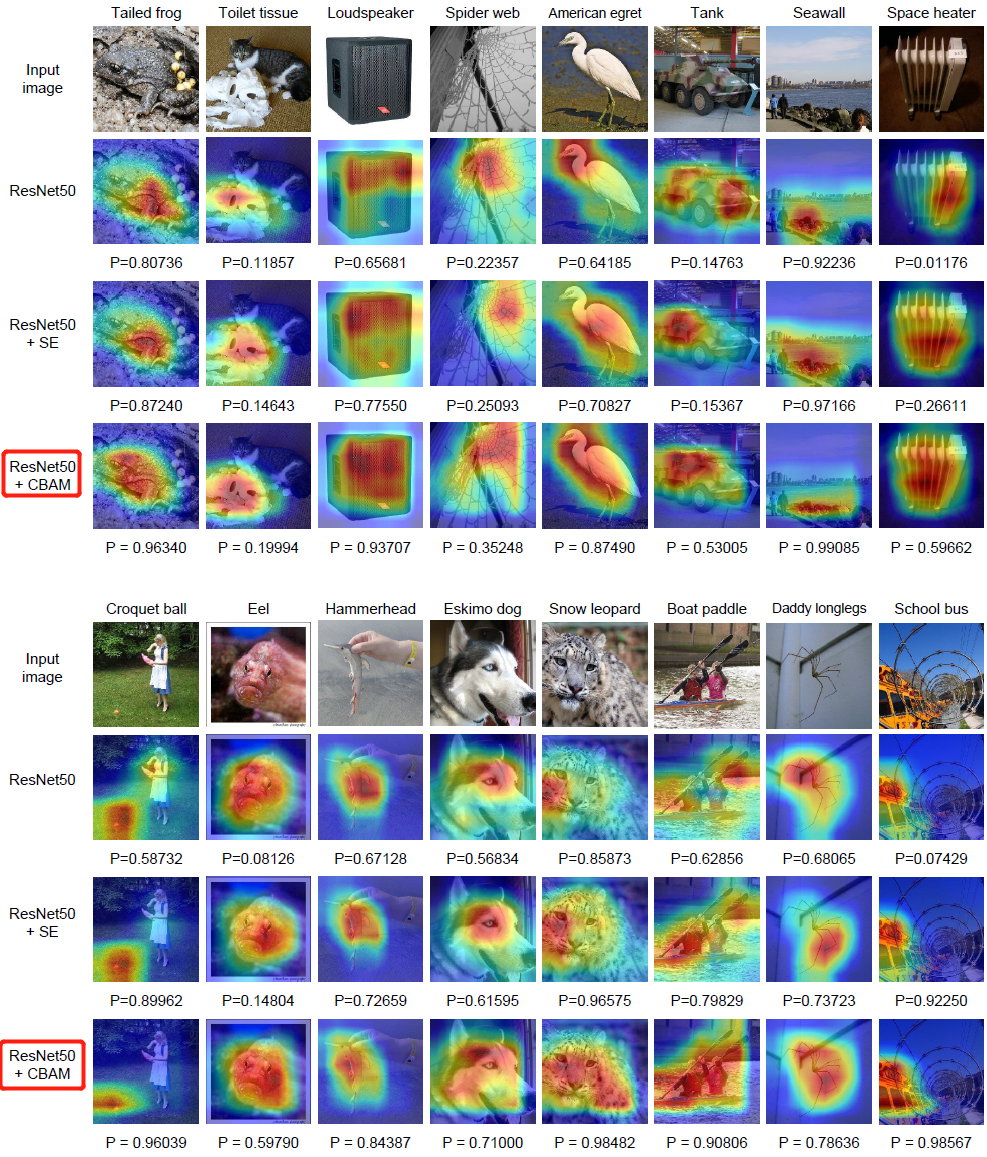
利用 Grad-CAM 對不一樣的網絡進行可視化后,能夠發現,引入 CBAM 后,特征覆蓋到了待識別物體的更多部位,而且最終判別物體的幾率也更高,這代表注意力機制的確讓網絡學會了關注重點信息。
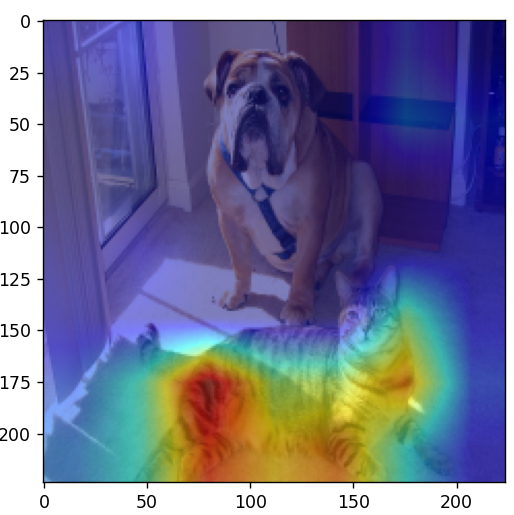
3.1 分類網絡使用grad-cam
代碼:https://github.com/jacobgil/pytorch-grad-cam
首先安裝庫 pip install grad-cam,然后運行以下文件
import os
import numpy as np
import torch
from PIL import Image
import matplotlib.pyplot as plt
from pytorch_grad_cam.utils.model_targets import ClassifierOutputTarget
from torchvision import models
from torchvision import transforms
from pytorch_grad_cam import GradCAMPlusPlus, GradCAM, XGradCAM
from pytorch_grad_cam.utils.image import show_cam_on_image
def main():
model = models.mobilenet_v3_large(pretrained=True)
print(model)
target_layers = [model.features[-1]]
# model = models.vgg16(pretrained=True)
# target_layers = [model.features]
# model = models.resnet34(pretrained=True)
# target_layers = [model.layer4]
# model = models.regnet_y_800mf(pretrained=True)
# target_layers = [model.trunk_output]
# model = models.efficientnet_b0(pretrained=True)
# target_layers = [model.features]
data_transform = transforms.Compose([transforms.ToTensor(),
transforms.Normalize([0.485, 0.456, 0.406], [0.229, 0.224, 0.225])])
# load image
img_path = "both.png"
assert os.path.exists(img_path), "file: '{}' dose not exist.".format(img_path)
img = Image.open(img_path).convert('RGB')
img = np.array(img, dtype=np.uint8)
# img = center_crop_img(img, 224)
# [C, H, W]
img_tensor = data_transform(img)
# expand batch dimension
# [C, H, W] -> [N, C, H, W]
input_tensor = torch.unsqueeze(img_tensor, dim=0)
cam = GradCAM(model=model, target_layers=target_layers, use_cuda=False)
targets = [ClassifierOutputTarget(281)] # tabby, tabby cat
# targets = [ClassifierOutputTarget(254)] # pug, pug-dog
# You can also pass aug_smooth=True and eigen_smooth=True, to apply smoothing.
grayscale_cam = cam(input_tensor=input_tensor, targets=targets)
grayscale_cam = grayscale_cam[0, :]
visualization = show_cam_on_image(img.astype(dtype=np.float32) / 255.,
grayscale_cam,
use_rgb=True)
plt.imshow(visualization)
plt.show()
if __name__ == '__main__':
main()
3.2 Yolov5-7.0使用grad-cam
代碼:https://github.com/z1069614715/objectdetection_script/tree/master/yolo-gradcam
首先安裝庫 pip install grad-cam,然后運行以下文件
import warnings
warnings.filterwarnings('ignore')
warnings.simplefilter('ignore')
import torch, yaml, cv2, os, shutil
import numpy as np
np.random.seed(0)
import matplotlib.pyplot as plt
from tqdm import trange
from PIL import Image
from models.yolo import Model
from utils.general import intersect_dicts
from utils.augmentations import letterbox
from utils.general import xywh2xyxy
from pytorch_grad_cam import GradCAMPlusPlus, GradCAM, XGradCAM
from pytorch_grad_cam.utils.image import show_cam_on_image
from pytorch_grad_cam.activations_and_gradients import ActivationsAndGradients
class yolov5_heatmap:
def __init__(self, weight, cfg, device, method, layer, backward_type, conf_threshold, ratio):
device = torch.device(device)
ckpt = torch.load(weight) # 包含模型權重、epoch、data等
model_names = ckpt['model'].names # 80個類別名
csd = ckpt['model'].float().state_dict() # checkpoint state_dict as FP32
model = Model(cfg, ch=3, nc=len(model_names)).to(device) # create model
csd = intersect_dicts(csd, model.state_dict(), exclude=['anchor']) # 篩選預訓練權重中的鍵值對,不加載anchor
model.load_state_dict(csd, strict=False) # load
model.eval()
print(f'Transferred {len(csd)}/{len(model.state_dict())} items')
target_layers = [eval(layer)]
method = eval(method)
colors = np.random.uniform(0, 255, size=(len(model_names), 3)).astype(np.int_) # 不同類別的顏色
self.__dict__.update(locals())
def post_process(self, result):
logits_ = result[..., 4:]
boxes_ = result[..., :4]
sorted, indices = torch.sort(logits_[..., 0], descending=True)
return logits_[0][indices[0]], xywh2xyxy(boxes_[0][indices[0]]).cpu().detach().numpy()
def draw_detections(self, box, color, name, img):
xmin, ymin, xmax, ymax = list(map(int, list(box)))
cv2.rectangle(img, (xmin, ymin), (xmax, ymax), tuple(int(x) for x in color), 2)
cv2.putText(img, str(name), (xmin, ymin - 5), cv2.FONT_HERSHEY_SIMPLEX, 0.8, tuple(int(x) for x in color), 2,
lineType=cv2.LINE_AA)
return img
def __call__(self, img_path, save_path):
# remove dir if exist
if os.path.exists(save_path):
shutil.rmtree(save_path)
# make dir if not exist
os.makedirs(save_path, exist_ok=True)
# img process
img = cv2.imread(img_path)
img = letterbox(img)[0]
img = cv2.cvtColor(img, cv2.COLOR_BGR2RGB)
img = np.float32(img) / 255.0
tensor = torch.from_numpy(np.transpose(img, axes=[2, 0, 1])).unsqueeze(0).to(self.device)
# init ActivationsAndGradients
grads = ActivationsAndGradients(self.model, self.target_layers, reshape_transform=None)
# get ActivationsAndResult
result = grads(tensor) # 從指定中間層提取激活值和梯度
activations = grads.activations[0].cpu().detach().numpy()
# postprocess to yolo output
post_result, post_boxes = self.post_process(result[0])
for i in trange(int(post_result.size(0) * self.ratio)):
if post_result[i][0] < self.conf_threshold: # 沒有非極大值抑制,只用置信度篩選,所以輸出的熱力圖結果比較多
break
self.model.zero_grad()
if self.backward_type == 'conf':
post_result[i, 0].backward(retain_graph=True)
else:
# get max probability for this prediction
score = post_result[i, 1:].max()
score.backward(retain_graph=True)
# process heatmap
gradients = grads.gradients[0]
b, k, u, v = gradients.size()
weights = self.method.get_cam_weights(self.method, None, None, None, activations,
gradients.detach().numpy())
weights = weights.reshape((b, k, 1, 1))
saliency_map = np.sum(weights * activations, axis=1)
saliency_map = np.squeeze(np.maximum(saliency_map, 0))
saliency_map = cv2.resize(saliency_map, (tensor.size(3), tensor.size(2))) # resize到原圖大小
saliency_map_min, saliency_map_max = saliency_map.min(), saliency_map.max()
if (saliency_map_max - saliency_map_min) == 0:
continue
saliency_map = (saliency_map - saliency_map_min) / (saliency_map_max - saliency_map_min) # scale到0-255之間
# add heatmap and box to image
cam_image = show_cam_on_image(img.copy(), saliency_map, use_rgb=True)
cam_image = self.draw_detections(post_boxes[i], self.colors[int(post_result[i, 1:].argmax())],
f'{self.model_names[int(post_result[i, 1:].argmax())]} {post_result[i][0]:.2f}',
cam_image)
cam_image = Image.fromarray(cam_image)
cam_image.save(f'{save_path}/{i}.png')
def get_params():
params = {
'weight': 'yolov5s.pt',
'cfg': 'models/yolov5s.yaml',
'device': 'cuda:0',
'method': 'XGradCAM', # GradCAMPlusPlus, GradCAM, XGradCAM
'layer': 'model.model[-2]',
'backward_type': 'conf', # class or conf
'conf_threshold': 0.6, # 0.6
'ratio': 0.02 # 0.02-0.1
}
return params
if __name__ == '__main__':
model = yolov5_heatmap(**get_params())
model(r'data/images/bus.jpg', 'result')

參考
1. SENet概覽
4. 注意機制(CBAM)理解
5. Grad-CAM簡介
 浙公網安備 33010602011771號
浙公網安備 33010602011771號